一种用于船舶壁面清洁的攀爬机器人
- 国知局
- 2024-08-01 06:34:22
本发明属于船舶高压水清洁,具体涉及一种用于船舶壁面清洁的攀爬机器人。
背景技术:
1、船舶壁面进行清洁时,通常采用搭载有清洁盘的爬壁机器人对壁面进行高压水清洁处理。由于船舶壁面并非完全平坦,而是存在一定的曲率变化,这使清洁盘以及机器人的行走机构无法完全贴合船舶壁面,一方面造成清洁盘与船舶壁面之间的清洁污水大量飞溅出,导致船舶壁面的二次脏污,另一方面造成机器人行走机构脱离船舶壁面,存在行走不稳的风险。
2、基于以上问题,本申请提出一种用于船舶壁面清洁的攀爬机器人,能够实现壁面曲率的自适应贴合,从而降低污水由清洁盘与船舶壁面之间飞溅出的几率以及机器人行走机构脱离船舶壁面而行走不稳的几率。
技术实现思路
1、本发明的目的是为克服上述现有技术的不足,提供一种用于船舶壁面清洁的攀爬机器人。
2、为实现上述目的,本发明采用如下技术方案:
3、一种用于船舶壁面清洁的攀爬机器人,包括清洗盘以及行走机构;
4、所述清洗盘包括呈底端敞口结构的清洗盘本体;所述清洗盘本体包括第一壳体,所述第一壳体的前后两侧对称设置第二壳体,所述第一壳体与第二壳体之间通过可伸缩的柔性折叠组件进行密封连接;所述清洗盘本体底端敞口的边缘处设置一圈橡胶密封垫,所述橡胶密封垫的底端沿周长方向设置密封毛刷;
5、所述第一壳体、第二壳体的顶端各设置一个插入到清洁盘本体内腔中的旋转喷头;
6、所述清洗盘本体的左右两侧对称设置有能够使第二壳体相对第一壳体下降的调节组件;
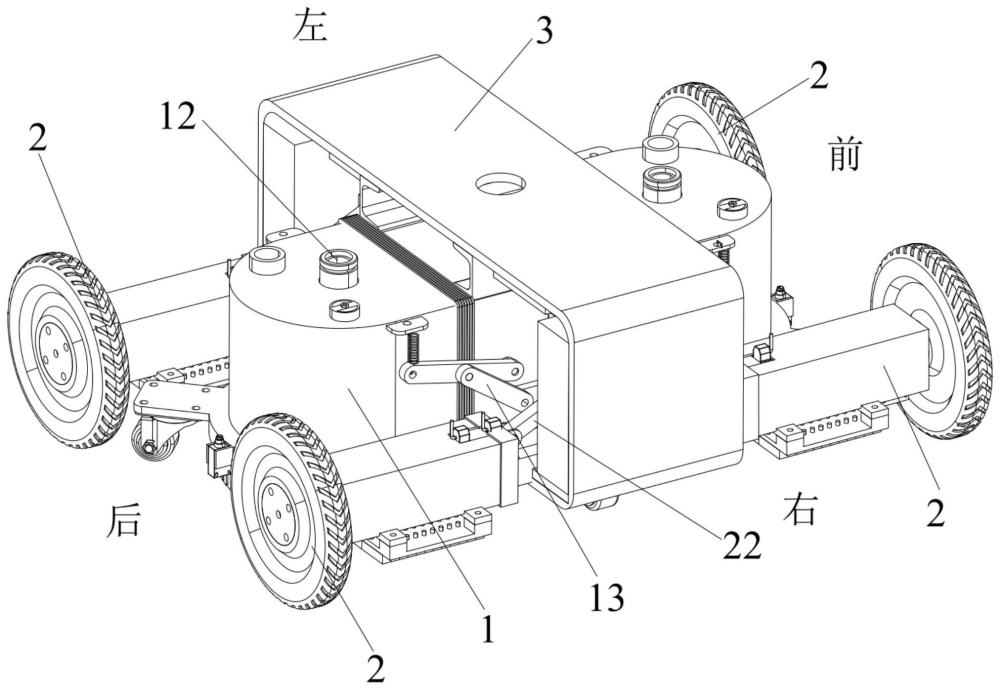
7、所述行走机构包括两组沿左右方向分布的行走轮组,每组行走轮组包括两个沿前后方向对称设置的行走轮组件,所述行走轮组件包括位于外侧的行走轮,所述行走轮适配有步进电机、减速器,所述步进电机、减速器的外部设置外壳;所述外壳的底端设置若干磁铁;
8、每组行走轮组中的两个行走轮组件之间设置行走调节组件;
9、所述行走调节组件与调节组件相连,所述行走调节组件与第一壳体相连;所述调节组件促使第二壳体相对第一壳体下降时,所述行走调节组件促使相应的行走轮相对第一壳体下降。
10、优选的,所述柔性折叠组件采用柔性风琴防护罩。
11、优选的,所述旋转喷头包括同轴设置的外管、内管,所述外管与清洗盘本体固定连接,所述内管与外管进行转动配合;所述内管的内壁上固定设置螺旋叶片;所述内管的底端垂直设置若干喷管,所述喷管与内管相连通,所述喷管的底端沿长度方向设置若干喷嘴。
12、优选的,所述外管包括上外管、下外管,所述上外管、下外管之间进行法兰连接;
13、所述上外管的内壁与内管的外壁之间进行密封配合;
14、所述下外管的内壁与内管的外壁之间进行转动配合。
15、优选的,所述上外管的内壁与内管的外壁之间沿轴向设置若干橡胶密封套。
16、优选的,所述调节组件包括固定设置在第一壳体上的调节电机,所述调节电机的输出轴端部向下与丝杆进行同轴固定连接,所述丝杆的底端与下固定板进行转动配合,所述下固定板与第一壳体固定连接;
17、所述调节电机的底端设置上固定板,所述上固定板上设置有供丝杆穿过的通孔;
18、所述上固定板、下固定板之间设置有两根与丝杆平行的导向柱,所述丝杆上螺纹配合有升降滑块,所述升降滑块与导向柱进行滑动配合;
19、所述升降滑块面向清洗盘本体的一端与连接件固定连接,所述连接件底部的前后两端分别设置有第一连杆、第二连杆、弹簧;
20、所述第一连杆的一端与连接件的相应端部相铰接,所述第一连杆的另一端与第二连杆的中部相铰接;两个第二连杆相向的一端均与第一壳体相铰接,所述第二连杆的另一端与相应侧弹簧的一端相连,所述弹簧的另一端与相应侧的第二壳体相连;
21、所述清洗盘本体的前后两端底部各设置有一个光电传感器;
22、所述光电传感器与调节电机电连。
23、优选的,所述行走调节组件包括行走连接件,所述行走连接件的两端分别与相应的外壳相铰接,所述行走连接件的中部向上垂直固定设置连接杆,所述连接杆上滑动配合有调节滑块;所述调节滑块的前后两端均铰接有一根调节连杆,所述调节连杆的另一端与相应侧的外壳相铰接;所述连接杆的顶端设置有防止调节滑块向上滑出的限位螺母;
24、所述调节滑块与升降滑块进行固定连接;
25、所述行走连接件与第一壳体固定连接。
26、优选的,所述第一壳体左右两侧的底部各设置一个万向轮;
27、位于前侧的第二壳体的前端底部、位于后侧的第二壳体的后端底部各设置有两个万向轮。
28、优选的,所述第二壳体的顶端设置有呼吸阀。
29、优选的,所述第二壳体的顶端设置有污水回收管。
30、本发明的有益效果是:
31、(1)本发明用于船舶壁面清洁的攀爬机器人使用时,光电传感器实时检测清洗盘本体前后两端底部距船舶壁面的距离,当距离大于设定值时,调节电机启动,在柔性折叠组件的可伸缩特性下控制第二壳体下移,从而使密封毛刷始终接触船舶壁面,实现清洁盘根据壁面曲率的自适应贴合,使清洁盘本体与船舶壁面之间形成相对密封空间,从而降低污水由清洁盘本体与船舶壁面之间飞溅出的几率;同时,升降滑块下移时带动调节滑块下移,调节滑块下移时,会促使行走轮组件绕与行走连接件相连的端部向下转动,即行走轮向下转动,实现行走机构与船舶壁面的贴合,从而降低了机器人行走机构脱离船舶壁面而行走不稳的几率;
32、(2)本发明中旋转喷头的结构设置,高压水进入内管后,在内部螺旋叶片的作用下产生旋流,高压水的旋流冲击促使内管带动喷管进行自主旋转,使得从喷嘴喷出的射流能量均匀分布,实现对船舶壁面全方位的冲击清洁;本发明中旋转喷头的结构设置实现了自主旋转,代替了现有的电动旋转,降低了能耗。
技术特征:1.一种用于船舶壁面清洁的攀爬机器人,其特征在于,一种用于船舶壁面清洁的攀爬机器人,包括清洗盘以及行走机构;
2.如权利要求1所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述柔性折叠组件采用柔性风琴防护罩。
3.如权利要求1所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述旋转喷头包括同轴设置的外管、内管,所述外管与清洗盘本体固定连接,所述内管与外管进行转动配合;所述内管的内壁上固定设置螺旋叶片;所述内管的底端垂直设置若干喷管,所述喷管与内管相连通,所述喷管的底端沿长度方向设置若干喷嘴。
4.如权利要求3所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述外管包括上外管、下外管,所述上外管、下外管之间进行法兰连接;
5.如权利要求4所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述上外管的内壁与内管的外壁之间沿轴向设置若干橡胶密封套。
6.如权利要求1所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述调节组件包括固定设置在第一壳体上的调节电机,所述调节电机的输出轴端部向下与丝杆进行同轴固定连接,所述丝杆的底端与下固定板进行转动配合,所述下固定板与第一壳体固定连接;
7.如权利要求6所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述行走调节组件包括行走连接件,所述行走连接件的两端分别与相应的外壳相铰接,所述行走连接件的中部向上垂直固定设置连接杆,所述连接杆上滑动配合有调节滑块;所述调节滑块的前后两端均铰接有一根调节连杆,所述调节连杆的另一端与相应侧的外壳相铰接;所述连接杆的顶端设置有防止调节滑块向上滑出的限位螺母;
8.如权利要求1所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述第一壳体左右两侧的底部各设置一个万向轮;
9.如权利要求1所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述第二壳体的顶端设置有呼吸阀。
10.如权利要求1所述的用于船舶壁面清洁的攀爬机器人,其特征在于,所述第二壳体的顶端设置有污水回收管。
技术总结本发明公开了一种用于船舶壁面清洁的攀爬机器人,属于船舶清洁技术领域,包括清洗盘以及行走机构;清洗盘包括清洗盘本体;清洗盘本体包括第一壳体、第二壳体,第一壳体与第二壳体之间通过柔性折叠组件密封连接;清洗盘本体底端敞口处设置一圈橡胶密封垫,橡胶密封垫底端设置密封毛刷;第一壳体、第二壳体顶端各设置一个旋转喷头;清洗盘本体左右两侧设置调节组件;两个行走轮组件之间设置行走调节组件;调节组件促使第二壳体相对第一壳体下降时,行走调节组件促使行走轮相对第一壳体下降。本发明能够实现壁面曲率的自适应贴合,从而降低污水由清洁盘本体与船舶壁面之间飞溅出的几率以及机器人行走机构脱离船舶壁面而行走不稳的几率。技术研发人员:陈广庆,张磊,卢坤媛,孙爱芹,辛金泽,王吉岱受保护的技术使用者:山东科技大学技术研发日:技术公布日:2024/5/6本文地址:https://www.jishuxx.com/zhuanli/20240722/224306.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种抛绳包的制作方法
下一篇
返回列表