一种海洋网箱水下作业用机器人
- 国知局
- 2024-08-01 06:56:35
本发明涉及渔业养殖用设备,具体为一种海洋网箱水下作业用机器人。
背景技术:
1、随着海洋经济的发展,海洋网箱养殖得到越来越多的重视,目前在海洋网箱的安装过程中经常涉及潜水作业,对于潜水员存在一定的风险,对于养殖方也存在成本较高、灵活性不足等问题;也可以将网箱整体上升到水面上进行相关作业,但是该方法存在成本高、周期长、对养殖海产影响大等问题。另外网箱的框架杆长度一般较长,目前常用的作业设备的抓手往往不能很好的实现对框架杆的夹持。
技术实现思路
1、本发明的目的在于提供一种海洋网箱水下作业用机器人,以解决现有技术中存在的问题。
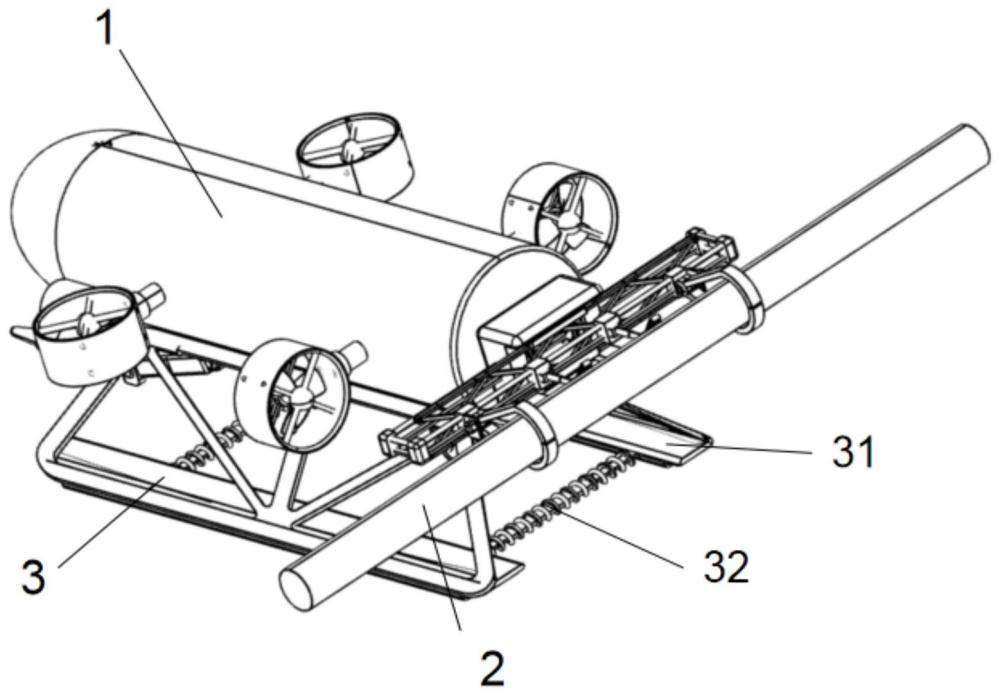
2、为了实现上述目的,本发明的技术方案提供了一种海洋网箱水下作业用机器人,包括有机器人主体,还包括抓手组件;所述抓手组件设置在机器人主体上,包括两个锁扣机构、两个固定机构;所述锁扣机构包括上爪、下爪、开合结构,所述上爪、下爪尾部铰接,在所述上爪、下爪靠近尾部的区域设置有开合结构;所述固定机构包括固定液压缸、接触爪,钢绳、弹簧,所述接触爪包括有上接触爪、下接触爪,所述上接触爪、下接触爪尾部铰接,在所述上接触爪、下接触爪靠近尾部的区域设置有弹簧,所述钢绳套在上接触爪、下接触爪同侧的绳座上,所述接触爪尾部固定在固定液压缸活塞杆端部;所述锁扣机构对称设置在两个固定机构之间或外侧,
3、优选的,所述锁扣机构的上爪、下爪前部呈圆弧状,且下爪端部位于锁扣机构中央上方,向上翘起并向铰接处弯曲。
4、优选的,所述锁扣机构的开合结构为液压油缸或电机齿轮结构。
5、优选的,在所述上接触爪、下接触爪相对的内侧面设置有多个接触件,所述接触件包括设置在上接触爪、下接触爪相对的内侧面的多个凹槽,和可转动设置在凹槽内的圆柱状结构。
6、优选的,所述抓手组件还包括变距机构;所述变距机构设置在锁扣机构、固定机构同机器人主体之间,包括外壳、滑动轴、变距致动单元、连接座;所述变距致动单元设置在外壳内,所述滑动轴为两个,上下布置,通过连接结构固定到外壳上,位于变距致动单元和锁扣机构、固定机构之间,所述锁扣机构、固定机构尾部通过连接座同变距致动单元连接,在所述连接座上设置有两个通孔,所述滑动轴穿过连接座中央的通孔;所述变距致动单元为滑块滑槽结构或者平行四边形变距结构。
7、优选的,所述滑动轴为可伸缩结构,具体包括伸缩轴内管、连接杆内管,连接杆套管、伸缩轴套管、连接侧管;所述伸缩轴内管、连接杆内管平行布置,其中连接杆内管一端固定到外壳上,所述连接杆套管、伸缩轴套管为空心管,其内径大于等于连接杆内管、伸缩轴内管外径,分别套在伸连接杆内管、缩轴内管外侧,远离外壳一端通过连接侧管固定连接;两侧的连接座对称的固定设置在伸缩轴套管上。
8、优选的,所述抓手组件还包括转动机构,所述转动机构一端固定到机器人主体上,另一端连接到变距机构,包括电机或液压转动机、转动盘,所述转动盘同轴承结构同机器人主体之间可转动连接;面向机器人主体外侧的侧面同变距致动单元的外壳固定连接;相对的另一侧设置有同心的啮合盘,所述啮合盘的边缘的齿轮结构同电机或液压转动机输出轴上齿轮啮合。
9、优选的,所述海洋网箱水下作业用机器人还包括坐底缓冲组件,所述坐底缓冲组件包括有两个支架结构、至少一个伸缩弹簧,所述支架结构顶部同所述机器人主体铰接,对称设置在所述机器人主体两侧,两个所述支架结构的中下部之间连接有伸缩弹簧,所述支架结构倾斜布置,顶部距离所述机器人主体中央轴线的距离小于底部。
10、本发明通过固定机构、锁扣机构的设置,可以实现的对网箱的框架杆的牢靠抓取,具有结构简单,抓取稳定性好的优点,而且通过变距结构的设置可以方便的适用于不同长度尺寸框架杆的抓取,另外通过转动机构可以实现横向和竖向抓取,具有良好的灵活性,通过坐底缓冲组件的设置,在坐底时,可有效的缓冲坐底冲击。
技术特征:1.一种海洋网箱水下作业用机器人,包括有机器人主体,其特征在于,还包括抓手组件;所述抓手组件设置在机器人主体上,包括两个锁扣机构、两个固定机构;所述锁扣机构包括上爪、下爪、开合结构,所述上爪、下爪尾部铰接,在所述上爪、下爪靠近尾部的区域设置有开合结构;所述固定机构包括固定液压缸、接触爪,钢绳、弹簧,所述接触爪包括有上接触爪、下接触爪,所述上接触爪、下接触爪尾部铰接,在所述上接触爪、下接触爪靠近尾部的区域设置有弹簧,所述钢绳套在上接触爪、下接触爪同侧的绳座上,所述接触爪尾部固定在固定液压缸活塞杆端部;所述锁扣机构对称设置在两个固定机构之间或外侧。
2.根据权利要求1所述一种海洋网箱水下作业用机器人,其特征在于,所述锁扣机构的上爪、下爪前部呈圆弧状,且下爪端部位于锁扣机构中央上方,向上翘起并向铰接处弯曲。
3.根据权利要求1所述一种海洋网箱水下作业用机器人,其特征在于,所述锁扣机构的开合结构为液压油缸或电机齿轮结构。
4.根据权利要求1所述一种海洋网箱水下作业用机器人,其特征在于,在所述上接触爪、下接触爪相对的内侧面设置有多个接触件,所述接触件包括设置在上接触爪、下接触爪相对的内侧面的多个凹槽,和可转动设置在凹槽内的圆柱状结构。
5.根据权利要求1所述一种海洋网箱水下作业用机器人,其特征在于,所述抓手组件还包括变距机构;所述变距机构设置在锁扣机构、固定机构同机器人主体之间,包括外壳、滑动轴、变距致动单元、连接座;所述变距致动单元设置在外壳内,所述滑动轴为两个,上下布置,通过连接结构固定到外壳上,位于变距致动单元和锁扣机构、固定机构之间,所述锁扣机构、固定机构尾部通过连接座同变距致动单元连接,在所述连接座上设置有两个通孔,所述滑动轴穿过连接座中央的通孔;所述变距致动单元为滑块滑槽结构或者平行四边形变距结构。
6.根据权利要求5所述一种海洋网箱水下作业用机器人,其特征在于,所述滑动轴为可伸缩结构,具体包括伸缩轴内管、连接杆内管,连接杆套管、伸缩轴套管、连接侧管;所述伸缩轴内管、连接杆内管平行布置,其中连接杆内管一端固定到外壳上,所述连接杆套管、伸缩轴套管为空心管,其内径大于等于连接杆内管、伸缩轴内管外径,分别套在伸连接杆内管、缩轴内管外侧,远离外壳一端通过连接侧管固定连接;两侧的连接座对称的固定设置在伸缩轴套管上。
7.根据权利要求5所述一种海洋网箱水下作业用机器人,其特征在于,所述抓手组件还包括转动机构,所述转动机构一端固定到机器人主体上,另一端连接到变距机构,包括电机或液压转动机、转动盘,所述转动盘同轴承结构同机器人主体之间可转动连接;面向机器人主体外侧的侧面同变距致动单元的外壳固定连接;相对的另一侧设置有同心的啮合盘,所述啮合盘的边缘的齿轮结构同电机或液压转动机输出轴上齿轮啮合。
8.根据权利要求1所述一种海洋网箱水下作业用机器人,其特征在于,所述海洋网箱水下作业用机器人还包括坐底缓冲组件,所述坐底缓冲组件包括有两个支架结构、至少一个伸缩弹簧,所述支架结构顶部同所述机器人主体铰接,对称设置在所述机器人主体两侧,两个所述支架结构的中下部之间连接有伸缩弹簧,所述支架结构倾斜布置,顶部距离所述机器人主体中央轴线的距离小于底部。
技术总结本发明公开一种海洋网箱水下作业用机器人包括有机器人主体,抓手组件、坐底缓冲组件;所述抓手组件包括两个锁扣机构、两个固定机构,所述锁扣机构对称设置在两个固定机构之间或外侧。本发明通过固定机构、锁扣机构的设置,可以实现的对网箱的框架杆的牢靠抓取,具有结构简单,抓取稳定性好的优点,而且通过变距结构的设置可以方便的适用于不同长度尺寸框架杆的抓取,另外通过转动机构可以实现横向和竖向抓取,具有良好的灵活性,通过坐底缓冲组件的设置,在坐底时,可有效的缓冲坐底冲击。技术研发人员:丁垤涛,郝嘉伟,黄技,胡波,朱闽,曹蕊蕊,邓文博,吴屯彪,阮俊诚受保护的技术使用者:广东海洋大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/225546.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种可潜水式智能救生艇
下一篇
返回列表