一种用于海上风电监测巡检的水下机器人
- 国知局
- 2024-08-01 06:57:23
本技术属于海上风电水下检测机器人,具体涉及一种用于海上风电监测巡检的水下机器人。
背景技术:
1、与此同时,海上风电的运营与维护工作也在日益增加,尤其是对于未来将布局在中远海初的设备,其运营与维护难度与成本相较近海设备将大得多。目前维护的主要方式主要是采用人工检修,即派遣检修人员潜入海底对风电桩基及海底电缆进行检查和维护。与此同时,国内尚没有足够的专业运维船只和经验丰富的运维人员来满足大量风场同时进入运维的需求,在短期内市场可能出现供不应求的情况。受制于天气、海浪等自然条件,不论是在海上风电机组维修中,还是在船舶运输过程中,运维作业都可能存在着一定安全风险,这对维修人员来说是个巨大的挑战,有时也会威胁到人员安全,因此采用水下机器人代替人工进行水下监测与巡检是大势所趋。同时,采用传统的人工监测和水下巡检会耗费大量人工成本和运行费用,一方面海上运维的安全性和稳定性无法得到保证,同时也会影响巡检效率,而这将是今后大力发展海上风电所急需解决的问题。
技术实现思路
1、本实用新型的目的在于克服上述现有技术难点,提供一种用于海上风电监测巡检的水下机器人,能够用于海上风电运维、水下管道的监测与维护,以解决人工运维成本高的问题同时提高运维人员在作业过程中的安全性。
2、为达上述目的,本实用新型采用以下技术方案予以实现:
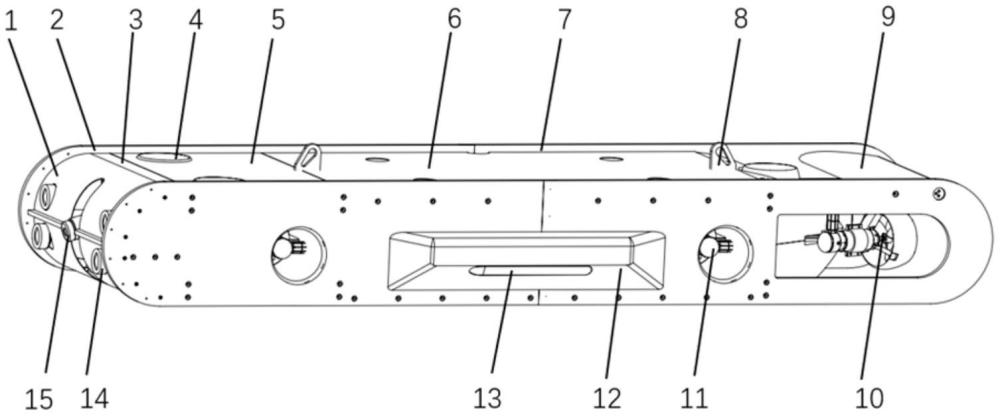
3、一种用于海上风电监测巡检的水下机器人,其特征在于:包括探测声纳系统,摄像系统,推进系统,水密舱结构和整体框架结构;
4、优选的,所述整体框架结构包括艏部pom板,中间铝型材和两侧的聚丙烯(pp)面板,艏部pom板两侧开有螺纹孔与两侧的聚丙烯面板固定,中间铝型材包括艏部蒙皮弧形支架,工型铝型材,t型铝型材和u型铝材,其中u型铝材分为1.5mu型铝材、0.6mu型铝材和0.2mu型铝材,1.5mu型铝材位于整体框架底部两侧与0.6mu型铝材两端各开有直径8.5的孔,通过m8的螺栓与防松螺母进行固定连接,t型铝材同样采用同样的方式固定在0.2mu型铝材两侧,聚丙烯面板分为聚丙烯板前段和聚丙烯板后段,中间采用螺栓固定,前后段聚丙烯面板通过m8螺栓与中间铝型材框架固定。
5、优选的,所述探测声纳系统包括声纳和dvl,声纳固定安装在声纳支架所设有的安装固定口中,dvl通过dvl支板上设有的孔位采用螺栓固定。
6、优选的,所述摄像系统采用舵机通过舵盘控制镜头固定壳转动,其中舵机与摄像头支撑固定板之间采用l板的固定方式,舵盘与镜头固定壳之间采用m3螺栓连接,镜头固定壳底部采用螺栓与镜头壳体连接,镜头固定壳另一端安装有轴肩螺丝与摄像头支撑固定板相连,另一端备有m6螺母,镜头安装在镜头壳体中间,顶盖与镜头壳体采用螺纹连接。
7、优选的,所述推进系统包括三个垂直推进器,两个侧向推进器以及两个水平推进器,垂直推进器通过电机固定支架上m8螺纹孔与0.2mu型铝型材固定,电机固定支架安装在推进器筒体上,艏部的垂直推进器采用左右对称方式排列,侧向推进器在导流管道中,采用同时的固定方式,固定在整体框架上,采用前后对称排布方式,导流管道通过螺栓固定在聚丙烯面板上。水平推近器通过水平斜支撑架固定在t型铝材上,两个水平推进器均呈45°矢量布局。
8、优选的,所述水密舱结构包括电池舱和电控舱,电池舱直径为262mm通过电池舱固定支架固定在底部的铝型材上,电池舱两端开有圆周分布的m6沉头孔,通过沉头螺丝与电池舱法兰固定,o型橡胶密封圈安装在电池舱法兰上的密封槽内,同时电池舱法兰上开有不同型号的孔用于安装水密插头,电控舱直径为212mm采用和电池舱同样的固定和安装方式。
9、与现有技术相比,本实用新型具有以下有益效果:
10、本实用新型采用自主研发的软件控制系统来对水下机器人进行操控,实现对海域内海上风电桩基和线缆的全面巡检,同时搭载声纳与相机实现水下目标的检测和识别,将检测方式由传统的船载声纳和水下作业人员现场检测升级为水下机器人自主检测,极大地提高了检测效率,同时降低了作业成本。
11、进一步的,结构外形采用扁平化设计,增加了水下机器人在水下航行时的稳定性,同时采用框架式结构与模块化布局,便于后期的维护。
12、进一步的,采用七推进器组合式的推进系统,大大增强了抗海流的能力。
技术特征:1.一种用于海上风电监测巡检的水下机器人,其特征在于:包括探测声纳系统,摄像系统,推进系统,水密舱结构和整体框架结构;
2.根据权利要求1所述的一种用于海上风电监测巡检的水下机器人,其特征在于,所述探测声纳系统包括声纳(13)和dvl,声纳(13)固定安装在声纳支架(12)所设有的安装固定口中,声纳支架(12)安装在整体框架两侧,dvl通过自身所带的孔固定在dvl支板(40)上。
3.根据权利要求1所述的一种用于海上风电监测巡检的水下机器人,其特征在于,所述摄像系统采用舵机(18)通过舵盘(20)控制镜头固定壳(21)转动,其中舵机(18)与摄像头支撑固定板(23)之间采用l板(19)的固定方式,舵盘(20)与镜头固定壳(21)之间采用m3螺栓连接,镜头固定壳(21)底部采用螺栓与镜头壳体连接,镜头固定壳(21)另一端安装有轴肩螺丝(24)与摄像头支撑固定板(23)相连,另一端备有m6螺母(22),镜头(43)安装在镜头壳体中间,顶盖(42)与镜头壳体采用螺纹连接。
4.根据权利要求1所述的一种用于海上风电监测巡检的水下机器人,其特征在于,所述推进系统包括三个垂直推进器,两个侧向推进器以及两个水平推进器,垂直推进器通过电机固定支架(44)上m8螺纹孔与0.6mu型铝型材固定,电机固定支架(44)安装在推进器筒体(35)上,艏部的垂直推进器采用左右对称方式排列,侧向推进器在导流管道(36)中,采用同样的固定方式,固定在整体框架上,采用前后对称排布方式,导流管道(36)通过螺栓固定在聚丙烯面板上,水平推近器通过水平斜支撑架(34)固定在t型铝材(41)上,两个水平推进器均呈45°矢量布局。
5.根据权利要求1所述的一种用于海上风电监测巡检的水下机器人,其特征在于,所述水密舱结构包括电池舱(26)和电控舱(37),电池舱(26)直径为262mm通过电池舱固定支架(30)固定在底部的铝型材上,电池舱(26)两端开有圆周分布的m6沉头孔,通过沉头螺丝与电池舱法兰(31)固定,o型橡胶密封圈(32)安装在电池舱法兰(31)上的密封槽内,同时电池舱法兰(31)上开有不同型号的孔用于安装水密插头和泄气阀,电控舱(37)直径为212mm通过电控舱固定支架(28)固定在框架底部,与电池舱(26)采用同样的安装方式。
技术总结本技术属于海上风电水下检测机器人技术领域,具体涉及一种用于海上风电监测巡检的水下机器人。包括探测声纳系统,摄像系统,推进系统,水密舱结构和整体框架结构;所述整体框架均采用扁平化设计,使用U型铝材、工字型铝材和T型铝材搭建而成,所述推进系统采用七推进器,即三个垂推、两个侧推和两个主推的组合方式,抗海流能力强,所述水密舱结构分为电池舱与电控舱,采用相同的密封方式,模块化布局,便于后期维护。本技术能够用于海上风电运维、水下管道的监测与维护,以解决人工运维成本高的问题同时提高运维人员在作业过程中的安全性。技术研发人员:金新,姜长乐,严天宏受保护的技术使用者:中国计量大学技术研发日:20230815技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/225604.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。