一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼
- 国知局
- 2024-08-01 07:04:38
本发明属于仿生机器人,特别涉及一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼。
背景技术:
1、海洋作为国家发展的重要战略领域,海洋资源开发能力、维护国家海洋权益等需求日益凸显。为满足不断变化的的水下任务需求,水下无人潜器(unmanned underwatervehicles,uuv)作为水下检测、作业以及运载装置,近些年来一直代替人力在复杂的水下环境执行任务。水下仿生机器鱼作为新型载体,拥有鱼类高效低噪等优势,在许多应用场景中有其独特的优势。比如,由于仿生机器鱼与真实鱼类有着相似的外观和运动规律,能欺骗水中的鱼跟随自己游动,从而达到洄游引导的效果;仿生机器鱼凭借其独特的外观和游泳方式使其拥有超强的隐蔽性,可以应用于军事领域;除此之外,在进行水下探测时,仿生机器鱼凭借其柔软的身体,可以进入复杂的水域进行作业。因此研制功能更强大、仿生效果更好的仿生机器鱼变得尤为重要。
2、作为鱼类的推进系统与操纵系统,鱼鳍大致分为对鳍和奇鳍两种类别。其中,对鳍,主要负责鱼类在水中的操纵性和稳定性,例如胸鳍和腹鳍;奇鳍,与快速推进相关,例如尾鳍和背鳍。当前仿生鱼机器人运动模式比较单一
3、因此,如何提供一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,通过鱼鳍间协调运动,对鱼体姿态即时调控,高效完成侧翻、转向、俯仰等各种复杂运动,实现仿生机器鱼的高机动特性,已经成为一个亟待解决的技术问题。
技术实现思路
1、本发明实施例提供一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,通过鱼鳍间协调运动,能够对鱼体姿态即时调控,高效完成侧翻、转向、俯仰等各种复杂运动,实现仿生机器鱼的高机动特性。
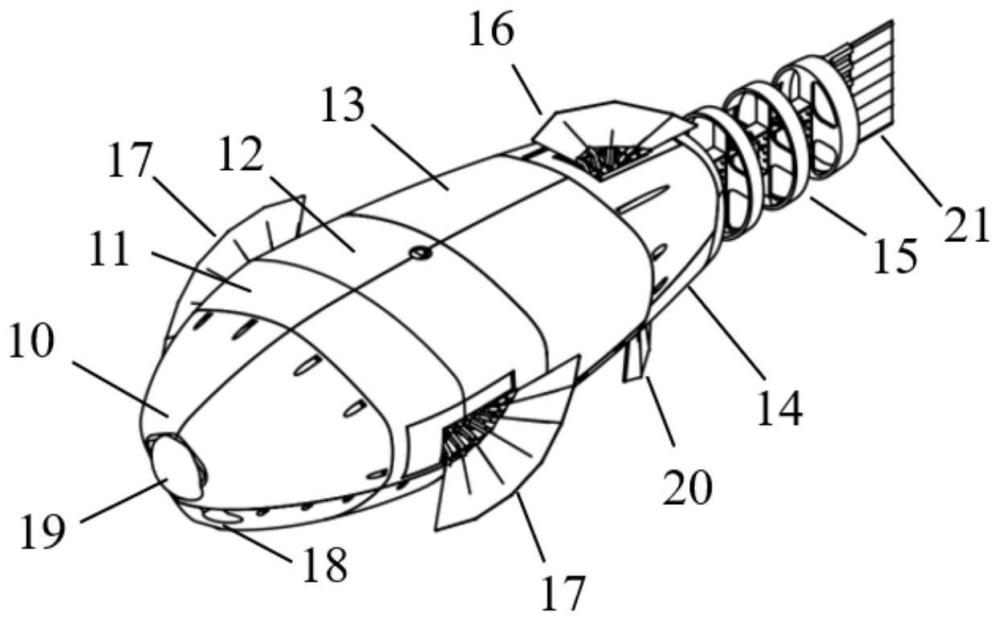
2、本发明实施例中,提供一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,所述仿生鲀科机器鱼,包括:鱼头舱、鱼体第一舱室、鱼体第二舱室、鱼体第三舱室、鱼体第四舱室、对称设置的胸鳍、背鳍、臀鳍及尾鳍;
3、所述鱼头舱设置于所述仿生鲀科机器鱼的最前部,在所述鱼头舱设置有视频采集装置,在所述鱼头舱的两侧分别设置照明装置,同时设置用于感知外部环境的红外传感器、温度传感器及盐度传感器;
4、所述鱼体第一舱室和鱼体第二舱室设置于所述仿生鲀科机器鱼的中前部,在所述鱼体第一舱室和鱼体第二舱室的内部设置控制舱,所述控制舱内设置控制单元,用于控制包括所述胸鳍、背鳍、臀鳍及尾鳍的运动;
5、所述鱼体第三舱室和鱼体第四舱室设置于所述仿生鲀科机器鱼的中后部,在所述鱼体第三舱室和鱼体第四舱室的内部设置重心调节舱和电池舱;所述重心调节舱用于机器鱼的上浮和下潜,通过电机控制重块在滑轨上沿着鱼身前后运动来控制重心变换;所述电池舱用于为整个仿生鲀科机器鱼提供电源;
6、所述胸鳍,包括:舵机、主轴、主齿轮、副齿轮、鳍条和鳍面;所述主轴与舵机相连接,所述舵机带动所述主轴转动,带动所述主齿轮和副齿轮转动,所述鳍条的根部与所述副齿轮通过连杆连接,所述鳍条跟随副齿轮做圆周往复运动;所述背鳍和臀鳍用于保证机器鱼的航行稳定性以及实现机器鱼的转弯;
7、所述尾鳍,包括尾柄第一节、尾柄第二节和尾柄第三节,以及分别对应连接的尾柄第一个舵机、尾柄第二个舵机和尾柄第三个舵机;所述尾柄第一节、尾柄第二节和尾柄第三节分别与所述尾柄第一个舵机、尾柄第二个舵机和尾柄第三个舵机联合摆动带动所述尾鳍运动,作为所述仿生鲀科机器鱼的驱动动力。
8、进一步地,所述胸鳍,包括7组由所述主齿轮、副齿轮和鳍条组成的组件结构,其中,每个齿轮组之间通过隔板连接并隔开;在运动开始时,所述鳍条设置不同的相位差,且每个相邻的所述鳍条相差15°,每个所述鳍条能够独立做往复运动,携带所述鳍面做近似真实鱼鳍的柔性运动。
9、进一步地,所述尾柄第一节、尾柄第二节和尾柄第三节的尺寸相等,所述尾柄第一节、尾柄第二节和尾柄第三节的运动能够分别通过所述尾柄第一个舵机、尾柄第二个舵机和尾柄第三个舵机控制,并且通过螺栓和转轴连接。
10、进一步地,所述背鳍和臀鳍采用与所述胸鳍相同结构设置,所述背鳍和臀鳍中由所述主齿轮、副齿轮、和鳍条组成的组件结构数量为5组。
11、进一步地,所述鱼体第一舱室和鱼体第二舱室通过螺栓拼接,在所述鱼体第一舱室和鱼体第二舱室的外壳两侧分别设置用于安装所述胸鳍的孔结构,在所述鱼体第四舱室的外壳上下方向分别设置安装所述背鳍和臀鳍的孔结构。
12、进一步地,鱼头舱为中空的尼龙壳体,所述鱼头舱与所述鱼体第一舱室采用卡口式连接,并涂抹防水胶水。
13、进一步地,所述仿生鲀科机器鱼的胸鳍、背鳍、臀鳍的柔性运动配合所述尾柄带动尾鳍的摆动,并通过姿态传感器实时反馈,基于cpg控制模型实现对鱼体姿态的即时调控,完成至少包括侧翻、转向及俯仰的运动模式。
14、进一步地,所述鳍条通过所述鳍面覆盖,所述鳍条的材料为碳纤维,所述鳍面的材料选择至少包括聚二甲基硅氧烷膜的疏水材料。
15、本发明所带来的有益效果如下:
16、从上述方案可以看出,本发明实施例提供一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,包括:鱼头舱、鱼体第一舱室、鱼体第二舱室、鱼体第三舱室、鱼体第四舱室、对称设置的胸鳍、背鳍、臀鳍及尾鳍。通过胸鳍、背鳍、臀鳍及尾鳍的共同协作,实现仿生鲀科机器鱼的多样水下运动。其中,每个鳍条具有独立的运动,鱼体和尾鳍作为主要推进装置,具有良好的推进能力,胸鳍主要用于仿生鱼前进和控制方向,协调尾鳍实现仿生鱼快速运动;臀鳍和背鳍通过运动控制可加速如转向等复杂运动进程,并通过平衡鱼头晃动,实现仿生鱼的平稳运动。本发明技术方案,通过鱼鳍间协调运动,能够对鱼体姿态即时调控,高效完成侧翻、转向、俯仰等各种复杂运动,实现仿生机器鱼的高机动特性。
技术特征:1.一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,其特征在于,所述仿生鲀科机器鱼,包括:鱼头舱、鱼体第一舱室、鱼体第二舱室、鱼体第三舱室、鱼体第四舱室、对称设置的胸鳍、背鳍、臀鳍及尾鳍;
2.根据权利要求1所述的一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,其特征在于,所述胸鳍,包括7组由所述主齿轮、副齿轮和鳍条组成的组件结构,其中,每个齿轮组之间通过隔板连接并隔开;在运动开始时,所述鳍条设置不同的相位差,且每个相邻的所述鳍条相差15°,每个所述鳍条能够独立做往复运动,携带所述鳍面做近似真实鱼鳍的柔性运动。
3.根据权利要求2所述的一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,其特征在于,所述尾柄第一节、尾柄第二节和尾柄第三节的尺寸相等,所述尾柄第一节、尾柄第二节和尾柄第三节的运动能够分别通过所述尾柄第一个舵机、尾柄第二个舵机和尾柄第三个舵机控制,并且通过螺栓和转轴连接。
4.根据权利要求1所述的一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,其特征在于,所述背鳍和臀鳍采用与所述胸鳍相同结构设置,所述背鳍和臀鳍中由所述主齿轮、副齿轮、和鳍条组成的组件结构数量为5组。
5.根据权利要求1所述的一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,其特征在于,所述鱼体第一舱室和鱼体第二舱室通过螺栓拼接,在所述鱼体第一舱室和鱼体第二舱室的外壳两侧分别设置用于安装所述胸鳍的孔结构,在所述鱼体第四舱室的外壳上下方向分别设置安装所述背鳍和臀鳍的孔结构。
6.根据权利要求1所述的一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,其特征在于,鱼头舱为中空的尼龙壳体,所述鱼头舱与所述鱼体第一舱室采用卡口式连接,并涂抹防水胶水。
7.根据权利要求1所述的一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,其特征在于,所述仿生鲀科机器鱼的胸鳍、背鳍、臀鳍的柔性运动配合所述尾柄带动尾鳍的摆动,并通过姿态传感器实时反馈,基于cpg控制模型实现对鱼体姿态的即时调控,完成至少包括侧翻、转向及俯仰的运动模式。
8.根据权利要求1至7任一项所述的一种柔性鳍-尾柄协同驱动的仿生鲀科机器鱼,其特征在于,所述鳍条通过所述鳍面覆盖,所述鳍条的材料为碳纤维,所述鳍面的材料选择至少包括聚二甲基硅氧烷膜的疏水材料。
技术总结本发明提供一种柔性鳍‑尾柄协同驱动的仿生鲀科机器鱼,包括:鱼头舱、鱼体第一舱室、鱼体第二舱室、鱼体第三舱室、鱼体第四舱室、对称设置的胸鳍、背鳍、臀鳍及尾鳍。通过胸鳍、背鳍、臀鳍及尾鳍的共同协作,实现仿生鲀科机器鱼的多样水下运动。其中,每个鳍条具有独立的运动,鱼体和尾鳍作为主要推进装置,具有良好的推进能力,胸鳍主要用于仿生鱼前进和控制方向,协调尾鳍实现仿生鱼快速运动;臀鳍和背鳍通过运动控制可加速如转向等复杂运动进程,并通过平衡鱼头晃动,实现仿生鱼的平稳运动。本发明技术方案,通过鱼鳍间协调运动,能够对鱼体姿态即时调控,高效完成侧翻、转向、俯仰等各种复杂运动,实现仿生机器鱼的高机动特性。技术研发人员:李若欣,张天宇,王鹏飞,邹少鹏,韩阳,刘兴,向晶,赵清扬,胡守军受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/225995.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表