用于船只的踏板驱动系统的制动系统的制作方法
- 国知局
- 2024-08-01 07:07:04
本发明总体上涉及用于船只的踏板驱动系统,并且具体地涉及包括辅助驱动系和人工驱动系的用于船只的踏板驱动系统。
背景技术:
1、诸如皮划艇之类的船只已经结合有踏板驱动器,并且近来已经结合有具有辅助系统的踏板驱动器,该辅助系统结合了马达,当操作员不再想要提供人工动力或不再想要提供所有人工动力时,可以选择性地激活该马达以为推力单元提供动力。此类系统在美国专利公布2021/0284309和美国专利11,148,775中进行了说明。
2、已经确定的是,在一些实施方式中,当使用者转换到辅助动力时,即使当使用者希望仅依靠辅助动力(例如,来自马达提供的动力)时,辅助驱动系也常常可以导致曲轴旋转。例如,在一些实施方式中,提供单向离合器以将通过踩踏板而人工驱动的曲轴与在辅助模式下由辅助驱动系的马达驱动的系统内的齿轮装置脱开。然而,单向离合器可以提供足够的摩擦力,使得在没有使用者脚踩在踏板上所提供的阻力的情况下,曲轴将由马达通过单向离合器驱动,并且曲轴不会被相应的齿轮装置超速。
3、这会不期望地导致曲轴旋转,从而使踏板与曲轴一起旋转。当使用者将他或她的脚从踏板上移开时,这会导致踏板撞击使用者。
技术实现思路
1、本技术的示例提供了用于船只的新的和改进的踏板驱动系统,特别是包括人工驱动系和辅助驱动系的踏板驱动系统。
2、在一个示例中,提供了一种用于船只的踏板驱动系统,其具有推力单元、人工驱动系、辅助驱动系以及人工驱动系制动器。推力单元可以具有螺旋桨或其他推力设备。人工驱动系包括机械地附接至曲轴的一对踏板,用于使曲轴围绕曲轴轴线旋转。至少在人工踏板模式下,人工驱动系连接到推力单元以通过踩踏该对踏板来将动力输入到推力单元。辅助驱动系具有马达。至少在辅助模式下,辅助驱动系连接到推力单元以将动力输入到推力单元。人工驱动系制动器作用在人工驱动系上,使得当辅助驱动系在辅助模式下为推力单元提供动力时,抑制曲轴围绕曲轴轴线的运动。
3、在一个示例中,曲轴可旋转地安装至驱动系统壳体。人工驱动系制动器包括相对于驱动系统壳体固定的第一摩擦垫,使得曲轴的旋转不会使第一摩擦垫旋转。人工驱动系制动器包括附接至曲轴的第二摩擦垫,用于随曲轴围绕曲轴轴线旋转。第二摩擦垫至少在处于辅助模式时接合第一摩擦垫,以在马达向推力单元提供动力时抑制曲轴的旋转。
4、在一个示例中,第一摩擦垫通过偏压构件偏压抵靠第二摩擦垫。
5、在一个示例中,偏压构件是波形弹簧、锥形弹簧、o形环或旋入驱动系统壳体的螺纹环中的至少一种。
6、在一个示例中,偏压构件提供平行于曲轴轴线的偏压力。
7、在一个示例中,人工驱动系制动器包括相对于驱动系统壳体固定的第三摩擦垫,使得曲轴的旋转不会使第三摩擦垫旋转。第二摩擦垫轴向地夹在第一摩擦垫和第三摩擦垫之间。
8、在一个示例中,第一摩擦垫和第二摩擦垫中的至少一个可沿着曲轴轴线轴向滑动。
9、在一个示例中,人工驱动系制动器包括插在偏压构件和第三摩擦垫之间的消声垫片。第三摩擦垫直接接合第二摩擦垫和消声垫片。偏压构件直接接合消声垫片。
10、在一个示例中,人工驱动系制动器盖部分相对于驱动系统壳体固定。第一摩擦垫和第二摩擦垫位于人工驱动系制动器盖部分内,人工驱动系制动器盖部分提供灰尘通风口。
11、在一个示例中,灰尘通风口竖直地位于曲轴轴线下方。
12、在一个示例中,人工驱动系制动器包括相对于驱动系统壳体固定的第三摩擦垫,使得曲轴的旋转不会使第三摩擦垫旋转。第二摩擦垫轴向地夹在第一摩擦垫和第三摩擦垫之间。偏压构件将第三摩擦垫和第二摩擦垫朝向第一摩擦垫偏压。当第二摩擦垫、第一摩擦垫或第二摩擦垫及第一摩擦垫磨损时,第二摩擦垫可沿曲轴轴线朝第一摩擦垫轴向滑动。
13、在一个示例中,人工驱动系制动器包括相对于驱动系统壳体固定的第三摩擦垫,使得曲轴的旋转不会使第三摩擦垫旋转。第二摩擦垫轴向地夹在第一摩擦垫和第三摩擦垫之间。偏压构件将第三摩擦垫和第二摩擦垫朝向第一摩擦垫偏压。当第一、第二或第三摩擦垫或其任何组合磨损时,第三摩擦垫可沿曲轴轴线朝第一摩擦垫轴向滑动。
14、在一个示例中,曲轴可旋转地安装至驱动系统壳体。人工驱动系制动器包括相对于驱动系统壳体固定的第一磁体构件,使得曲轴的旋转不会使第一磁体构件旋转。人工驱动系制动器包括可操作地附接至曲轴以与曲轴一起围绕曲轴轴线旋转的第二磁体构件。第二磁体构件至少在处于辅助模式时与第一磁体构件相互作用,以在马达向推力单元提供动力时抑制曲轴的旋转。
15、在一个示例中,第一磁体构件和第二磁体构件彼此吸引。
16、在一个示例中,提供第三磁体构件。第三磁体构件:
17、a)相对于驱动系统壳体固定并具有与第一磁体构件相同的磁特性,或
18、b)可操作地附接至曲轴以随曲轴围绕曲轴轴线旋转并且具有与第二磁体构件相同的磁特性。
19、在一个示例中,第一磁体构件和第二磁体构件中的至少一个是能够被激活和停用的电磁体。
20、在一个示例中,电磁体在处于辅助模式时被激活并且在处于人工模式时被停用。
21、在一个示例中,当辅助模式被激活时,电磁体被自动激活。
22、在一个示例中,第二磁体附接至人工驱动系的曲柄臂。曲柄臂附接至曲轴并相对于曲轴轴线径向延伸。
23、在一个示例中,曲轴可旋转地安装至驱动系统壳体。人工驱动系制动器包括相对于驱动系统壳体固定的流体壳体,使得曲轴相对于驱动系统壳体的旋转不会使流体壳体旋转。人工驱动系制动器包括位于流体壳体内的流体。人工驱动系制动器包括与流体壳体内的流体接合的转子元件。转子元件可操作地附接至曲轴,以当处于辅助模式时与曲轴一起旋转,从而当马达向推力单元提供动力时抑制曲轴的旋转。
24、在一个示例中,曲轴可旋转地安装至驱动系统壳体。人工驱动系制动器包括安装到驱动系统壳体的手动杆。手动杆可在阻挡位置和缩回位置之间移动。在阻挡位置,手动杆构造成接合从曲轴径向延伸的曲柄臂,并且在辅助模式下防止曲轴由于马达为推力单元提供动力而围绕曲轴轴线沿第一方向旋转。在缩回位置,当曲轴围绕曲轴轴线旋转时,手动杆不接合曲柄臂。
25、在一个示例中,当处于阻挡位置时,手动杆构造成当曲轴沿与第一方向相反的第二方向旋转时在与曲柄臂接合时向缩回位置转变。
26、在一个示例中,当曲轴沿第二方向旋转时曲柄臂旋转经过手动杆时,手动杆返回到阻挡位置。
27、在一个示例中,手动杆具有过中心(over center)布置,当手动杆已经转变到阻挡位置时,其阻碍手动杆从阻挡位置转变到缩回位置,并且当手动杆已经转变到缩回位置时,其阻碍手动杆从缩回位置转变到阻挡位置。
28、在一个示例中,手动杆被承载以相对于驱动系统壳体围绕过中心轴线旋转。
29、在一个示例中,当处于人工模式时,人工驱动系制动器是激活的。
30、在一个示例中,当处于人工模式时,人工驱动系制动器不是激活的。
31、在一个示例中,当辅助模式被激活时,人工驱动系制动器被自动停用。
32、在一个示例中,人工驱动系制动器具有激活配置,其中第一摩擦垫偏压抵靠第二摩擦垫;和停用配置,其中第一摩擦垫不偏压抵靠第二摩擦垫。
33、在一个示例中,当辅助模式被激活时,人工驱动系制动器自动从停用配置转变到激活配置。
34、在一个示例中,人工驱动系制动器包括致动器,该致动器使人工驱动系制动器在停用配置和激活配置之间转变。
35、在一个示例中,当处于辅助模式时,第一齿轮由辅助驱动系的马达驱动,用于围绕曲轴轴线旋转,以将动力从马达传递至推力单元。单向离合器插在第一齿轮和曲轴之间,当第一齿轮在辅助模式下由马达驱动时,单向离合器允许第一齿轮相对于曲轴超速。
36、在一个示例中,曲轴在人工模式下可操作地连接到第一齿轮,使得当在人工模式下时曲柄的旋转驱动第一齿轮,并且经由第一齿轮和曲轴将动力从可操作地连接到曲轴的一对踏板传递到推力单元。
37、在一个示例中,提供了一种具有人工模式和辅助模式的联接装置。联接装置包括使联接装置在人工模式和辅助模式之间转变的联接器。在人工模式中,联接器将曲轴机械地联接到推力单元,使得曲轴沿第一角度方向围绕曲轴轴线的旋转驱动推力单元沿第一推力方向输出推力,并且曲轴沿与第一角度方向相反的第二角度方向围绕曲轴轴线的旋转驱动推力单元沿与第一推力方向相反的第二推力方向输出推力。在辅助模式中,联接装置将曲轴联接至推力单元,使得曲轴沿第一角度方向围绕曲轴轴线的旋转驱动推力单元沿第一推力方向输出推力,并且曲轴沿第二角度方向围绕曲轴轴线的旋转不驱动推力单元沿第二推力方向输出推力。在辅助模式中,辅助驱动系机械连接至推力单元,使得当马达通电时,辅助驱动系驱动推力单元沿第一推力方向输出推力。
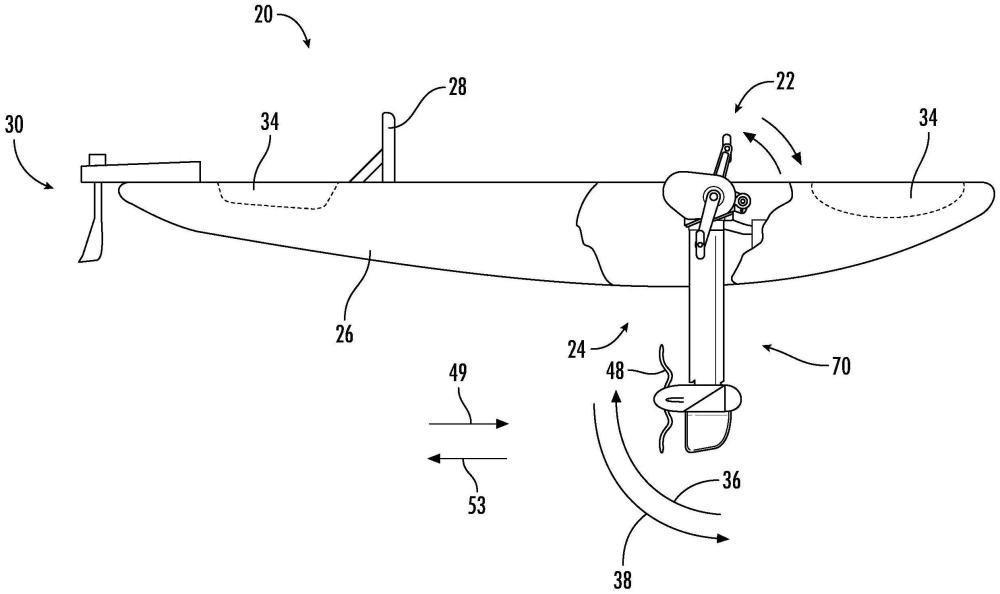
38、在一个示例中,船只包括船体和安装到船体的如上所述的踏板驱动系统。
39、在一个示例中,提供了一种操作船只的踏板驱动系统的方法。踏板驱动系统是如上所述的踏板驱动系统。该方法包括当处于辅助模式时利用人工驱动系制动器抑制曲轴的旋转。
40、在一个示例中,提供了一种操作船只的踏板驱动系统的方法。踏板驱动系统是如上所述的踏板驱动系统。曲轴可旋转地安装至驱动系统壳体。该方法包括在驱动系统壳体和曲轴之间提供一定量的阻力,该阻力大于在单向离合器和曲轴之间提供的通过单向离合器来驱动曲轴的扭矩。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226219.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表