一种姿态浮力调节装置耦合的水下液体运输机器人及其充液控制方法和姿态调节方法
- 国知局
- 2024-08-01 07:16:19
本发明涉及水下机器人,具体是涉及一种姿态浮力调节装置耦合的水下液体运输机器人及其充液控制方法和姿态调节方法。
背景技术:
1、目前常用的液体运输装置有管道运输、液货船运输、集装箱液袋运输等,其中很多都是针对陆上液体运输。管道运输是一种利用管道来进行长距离输送油气以及化学用品等物质的运输方式,但是管道运输的局限性较多,灵活性较差。液货船运输是一种在海上利用船舶来运输油气以及化学用品的运输方式,但易受天气影响。在液体运输方式中,集装箱液袋运输方式的成本相对较低,但这种液袋所用的材料是一次性的,不够节能。另外柱壳式的液体运输方式耐压性能较差。
2、相比于传统的运输方式,水下液体运输机器人的灵活性较强,不易受外界影响且维修方便。姿态调节、浮力调节是水下液体运输机器人的重要组成成分,姿态调节和浮力调节的组合使用可以实现水下液体运输机器人多个自由度的动作,从而使得水下液体运输机器人更加灵活、快捷、高效地运输液体。
3、现有技术中,如申请号为202310007368.x的中国专利申请,公开了一种分段式模块化水下机器人,一定程度上解决了续航问题,但其水下机器人不具备自主升沉能力的技术问题。又如申请号为201610963832.2的中国专利申请,公开了一种带有转向控制仓、浮力调节仓、重心调节仓的水下检测机器人,可实现水下航行、浮潜、回转、定常滑翔与自主避障的多功能的一体化,但其姿态调节、浮力调节是分开来单独控制的,在浮力调整和姿态调节时操作过于复杂。又如申请号为202122238259.8的中国专利申请,公开了一种具有新型浮沉装置的水下作业机器人,实现水下作业机器人浮力与自重重力差值的自动调节,但其姿态调节不够灵敏,难以面对复杂情况。
技术实现思路
1、发明目的:针对以上问题,本发明提供一种操作简单、调节灵敏的姿态浮力调节装置耦合的水下液体运输机器人。
2、本发明还提供一种上述水下液体运输机器人的充液控制方法和姿态调节方法。
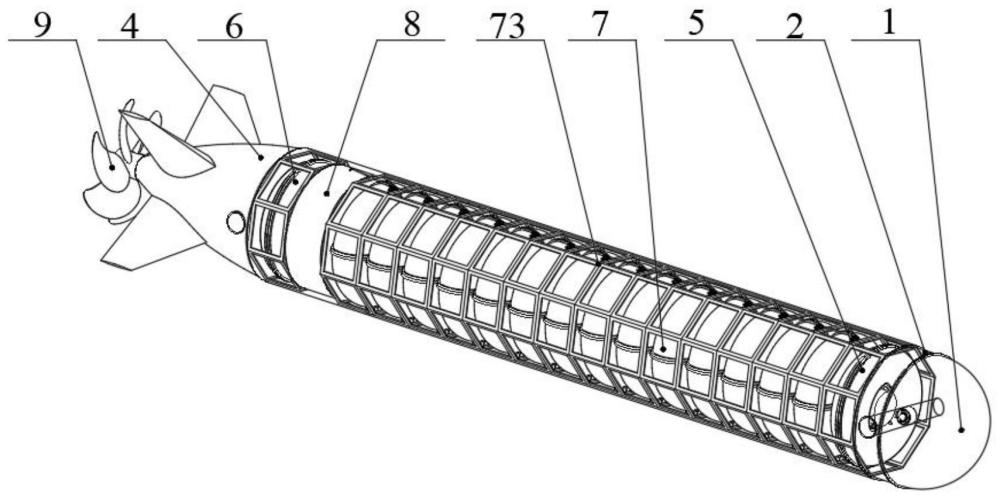
3、技术方案:为解决上述问题,本发明采用一种姿态浮力调节装置耦合的水下液体运输机器人,包括用于存储运输液体的液体运输舱、用于为水下液体运输机器人提供动力的推进模块、艏部调节模块和尾部调节模块,所述艏部调节模块和尾部调节模块分别位于液体运输舱两端,且艏部调节模块和尾部调节模块的结构相同,所述艏部调节模块包括液压控制系统、水囊固定架、安装于水囊固定架内的水囊和驱动电机、环形齿轮轨道,所述环形齿轮轨道为以水下液体运输机器人中轴线为中心的环形轨道,驱动电机通过齿轮传动机构驱动水囊固定架沿环形齿轮轨道移动,改变水下液体运输机器人重心位置,调整水下液体运输机器人姿态;所述液压控制系统控制水囊吸入或排出外部液体,调整水下液体运输机器人浮力。
4、进一步的,所述艏部调节模块还包括与环形齿轮轨道同轴设置的环形滚轮轨道、环形车和设置于环形车上的滚轮,所述水囊固定架固定连接于环形车上,所述滚轮沿环形滚轮轨道移动,所述水囊固定架为与环形齿轮轨道同轴的弧形。
5、进一步的,所述艏部调节模块包括艏部环形舱、艏部液压舱,所述艏部环形舱套设于艏部液压舱外,所述水囊固定架、环形齿轮轨道、齿轮传动机构设置于艏部环形舱,所述液压控制系统设置于艏部液压舱内,艏部液压舱包括艏部调节舱和设置于艏部调节舱一端的艏部调节舱盖,艏部调节舱内设置截止式电磁阀、海水泵、单向阀ⅳ和过滤阀ⅳ,所述艏部调节舱盖设置与外部连通的通孔,过滤阀ⅳ一端通过软管与艏部调节舱盖上的通孔连通,过滤阀ⅳ另一端与海水泵连接,海水泵另一端分别与截止式电磁阀和单向阀ⅳ连接,截止式电磁阀和单向阀ⅳ另一端均与水囊连接,所述海水泵驱动水囊充入或排出液体,改变水囊质量。
6、进一步的,所述液体运输舱包括若干储存舱,储存舱为环形舱,所述储存舱内容纳一种液体或者两种液体或者三种液体。
7、进一步的,储存舱包括环形壳体、设置于环形壳体内的环形活塞ⅰ和环形活塞ⅱ,所述环形壳体设置有单孔挡板和双孔挡板,所述双孔挡板和环形活塞ⅰ之间的容纳空间与双孔挡板和环形活塞ⅱ之间的容纳空间为两个不相通的独立空间,所述双孔挡板设置水密头ⅱ和水密头ⅲ,水密头ⅱ和水密头ⅲ分别连通双孔挡板与环形活塞ⅱ之间的容纳空间和双孔挡板与环形活塞ⅰ之间的容纳空间,所述单孔挡板设置水密头ⅰ连通环形壳体内部,所述双孔挡板与环形活塞ⅰ之间、环形活塞ⅰ与环形活塞ⅱ之间、环形活塞ⅱ与双孔挡板之间为单独的液体容纳空间。
8、进一步的,该水下液体运输机器人还包括用于控制液体运输舱内液体进出的液体运输装置,所述液体运输装置包括三个液体运输单元,三个液体运输单元分别用于双孔挡板与环形活塞ⅰ之间、环形活塞ⅰ与环形活塞ⅱ之间、环形活塞ⅱ与双孔挡板之间的液体充入和排出。
9、进一步的,该水下液体运输机器人还包括位于多个储存舱环形内圈内部的中间补偿装置,所述中间补偿装置包括控制仓和位于控制仓两端的左活塞缸和右活塞缸,且左活塞缸和右活塞缸结构相同,左活塞缸、控制仓、右活塞缸沿液体运输舱轴向依次设置,所述控制仓包括双向液压泵、开关阀和油箱,所述双向液压泵通过开关阀将油箱中的油液充入左活塞缸和右活塞缸。
10、本发明还提供一种用于上述水下液体运输机器人的充液控制方法,包括清洗储存舱、充入运输液体和排出运输液体;在初始状态时,环形活塞ⅰ和环形活塞ⅱ位于水密头ⅰ两侧;
11、所述清洗储存舱的具体步骤为:
12、液体运输装置通过水密头ⅰ向环形活塞ⅰ和环形活塞ⅱ之间充入纯净水,环形活塞ⅰ和环形活塞ⅱ相反运动,直至储存舱内充满纯净水;
13、所述充入运输液体的具体步骤为:
14、步骤11:对充满纯净水的储存舱,由液体运输装置通过水密头ⅱ向双孔挡板与环形活塞ⅱ之间充入海水,环形活塞ⅱ向靠近水密头ⅰ的方向移动,此时纯净水从水密头ⅰ排出,当环形活塞ⅱ与水密头ⅰ的距离到达第一阈值时,停止充入海水;
15、步骤12:液体运输装置通过水密头ⅲ向双孔挡板与环形活塞ⅰ之间充入运输液体,环形活塞ⅰ向靠近水密头ⅰ的方向移动,此时纯净水从水密头ⅰ排出,当环形活塞ⅰ与水密头ⅰ的距离到达第二阈值时,停止充入运输液体;
16、步骤13:同时向双孔挡板与环形活塞ⅱ之间充入海水,和向双孔挡板与环形活塞ⅰ之间充入运输液体,环形活塞ⅱ和环形活塞ⅰ相互靠近,此时纯净水从水密头ⅰ排出,且纯净水完全排出时,环形活塞ⅰ和环形活塞ⅱ位于水密头ⅰ两侧;
17、步骤14:通过水密头ⅲ向双孔挡板与环形活塞ⅰ之间充入运输液体,环形活塞ⅰ和环形活塞ⅱ向靠近水密头ⅱ的方向移动,此时海水从水密头ⅱ排出,直至储存舱内充满运输液体;
18、所述排出运输液体的具体步骤为:
19、通过水密头ⅱ向双孔挡板与环形活塞ⅱ之间充入海水,环形活塞ⅰ和环形活塞ⅱ同时向靠近水密头ⅰ的方向移动,此时运输液体从水密头ⅲ排出,当环形活塞ⅰ和环形活塞ⅱ位于水密头ⅰ两侧,停止充入海水,通过水密头ⅰ向环形活塞ⅰ和环形活塞ⅱ之间充入纯净水,环形活塞ⅰ和环形活塞ⅱ相反运动,此时海水从水密头ⅱ排出,运输液体从水密头ⅲ排出,直至储存舱内充满纯净水。
20、本发明还提供一种用于上述水下液体运输机器人的姿态调节方法,包括以下步骤:
21、步骤1:以水下液体运输机器人的中心轴线与重心和浮心连线的交点为原点建立固定坐标系,以水下液体运输机器人的几何中心为原点建立载体坐标系,以艏部调节模块的几何中心为原点建立第一坐标系,以尾部调节模块的几何中心为原点建立第二坐标系;
22、步骤2:基于建立的坐标系,根据理论力学,由静力平衡原理得到水下液体运输机器人的平衡方程;
23、步骤3:确定水下液体运输机器人的调整姿态;根据平衡方程计算得到调节参数;
24、步骤4:根据得到的调节参数调整水下液体运输机器人的姿态。
25、进一步的,当水下液体运输机器人进行横摇姿态调节时,根据平衡方程计算得到水囊固定架转动角度的目标改变量δβ;根据计算的目标改变量δβ;控制驱动电机驱动水囊固定架转动;
26、当水下液体运输机器人进行俯仰姿态调节时,根据平衡方程计算得到艏部调节模块和尾部调节模块的水囊的目标改变量δg1和目标改变量δg2;通过液压控制系统控制水囊充入或排出对应体积的液体,达到水囊的目标改变量δg1和目标改变量δg2。
27、有益效果:本发明相对于现有技术,其显著优点是艏部调节模块和尾部调节模块既可以调节姿态也可以调节浮力,且在调节姿态的过程中可以保持浮力不变,在调节浮力的过程中可以保持姿态不变,且浮力和姿态调节模块耦合在一起,浮力调节的内水囊充当姿态调节的质量块,结构紧凑,可以同时调节姿态和调节浮力,并且调节方法简单、快速、高效、精准、灵敏。
28、艏(尾)部调节模块和液体运输装置中的储存舱均采用环形耐压壳,环形耐压壳外形呈周向,尺寸分布均匀,可以提高空间利用率,使用性能也相对优越,同时环形耐压壳的承载能力也比较强,耐压性能良好。水下液体运输机器人整体外壳成流线型,可以减小机器人运行阻力。此外,流线型的外形设计能削弱绕流后的分离程度,减小前后的压力差,使阻力降低。
29、水下液体运输机器人中的纯净水、海水、运输液体等分别设置独立的液压驱动系统,实现液体的独立充液,又确保了每一个液体运输装置的清洁效果,从而让运输装置实现多次利用,延长其使用寿命。通过海水作为过渡液体,当充入运输液体时,逐步将海水排出,当排出运输液体时,又逐步将海水吸入,浮力波动较小。
30、不同的液体具有不同的密度,之间是存在密度差的,在运输过程中,海水和液体不会同时均匀的进入每个储存舱,如果不采取其他措施来抵消,就会导致水下液体运输机器人质心发生偏离,通过中间补偿装置来平衡液体和海水之间的密度差,从而让水下液体运输机器人能够平稳前行。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226822.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表