一种无人船用淤积调查系统及方法与流程
- 国知局
- 2024-08-01 07:16:57
本发明涉及淤积调查,尤其涉及一种无人船用淤积调查系统及方法。
背景技术:
1、淤积主要指在静水或缓慢的流水环境中沉积或伴有生物化学作用形成的黏性土,淤积可以覆盖水下水利、通信、管路设施,且当河湖库塘淤积量较大时,将直接影响水环境质量、行洪能力和通航安全,需要对淤积进行探测调查,为清淤、根石排查、管线排查、污染物调查等工作提供基础支撑。
2、为实现淤积调查或相关目的,近年来,业界不断创新探索,提高淤积调查能力。
3、公开号为cn103884625b的中国专利公开了一种基于数据融合的水库底泥密度探测方法和系统,该方法在使用底泥取样器取样后,在实验室将样品放置在水箱中进行浅剖分析,该专利并非一种淤积调查方法,而是底泥密度探测方法;公开号为cn105865841b的中国专利公开了一种污染水体的遥控式底泥探测及采泥、采水系统及方法,用于探测水深及采集底泥样品,该方法可以采集污染水样及底泥样品,但不适用于水域整体淤积调查。公开号为cn108985304b的中国专利公开了一种基于浅剖数据的沉积层结构自动提取方法,适用于海底地质调查,但不适用于淤积调查。
4、公开号为cn111580113b的中国专利公开了一种河道库岸水下地形及淤泥厚度勘测系统,将当前行业内常用水下地形、地质查勘设备进行了集成,可以通过单次航行完成水下地形、地质的统一查勘,携带了几乎所有水下测绘查勘可用类型传感器,装置成本巨大,多种传感器动辄上几十上百万,同时,所用大型无人船不方便携带外野工作,缺乏便捷性和可用性,且针对淤积调查,并未提出完整的调查方法。
5、公开号为cn112630860b的中国专利公开了一种河湖底泥探测方法及系统,使用机载激光雷达探测水底深度,并通过底泥探测设备在预设的多个探测点进行底泥探测,获取多个探测点的底泥深度,由于激光雷达穿透能力有限,目前仅有蓝绿激光型雷达能够测量到水质很清的水体底部,对于水质较差水域,几乎无法使用,且其采用的机械式底泥探测方法与通过柱状底泥取样器(重力取样器)方法类似,用于淤积调查的效率不高。
6、因此,亟需一种淤积调查系统及方法,能够提高淤积调查的便捷性、实用性及调查效率,满足国内不断增长的淤积调查需求。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种无人船用淤积调查系统和方法。
2、一种无人船用淤积调查系统,包括3部分:水中数据采集部分,空中机载传输部分以及岸基监控工作部分;
3、所述水中数据采集部分包括无人船、船控模块、核心控制器、船载电池供电模块、船载无线传输模块、传感器模块以及云台模块;
4、所述空中机载传输部分包括:无人机和机载无线传输模块;
5、所述岸基监控工作部分包括:无线基站、工作站以及岸基电池供电模块;
6、所述船载无线传输模块、所述空中机载传输部分以及所述无线基站自组网通信,用于实现网络中继;
7、通过所述自组网,所述水中数据采集部分与所述岸基监控工作部分进行数据传输和指令传达。
8、进一步地,所述传感器模块包括:gnss高精度导航定位模块、浅剖控制器、声源及水听器组、imu传感器、视觉传感器、单波束传感器、毫米波雷达传感器以及声速剖面仪。
9、进一步地,所述核心控制器接收所述传感器模块采集的数据,控制所述无人船航行,把接收到的数据实时回传给所述岸基监控工作部分。
10、进一步地,所述空中机载传输部分还包括:
11、若所述无人船与所述无线基站之间距离大于5km和/或所述无人船与所述无线基站之间在t时间内将存在遮挡构筑物,则操控所述空中机载传输部分飞行至所述无人船与所述无线基站之间的空域且高于所述无线基站30m至100m,所述船载无线传输模块、所述空中机载传输部分以及所述无线基站自组网通信;
12、若所述无人船与所述无线基站之间距离不大于5km且所述无人船与所述无线基站之间在t时间内不会存在遮挡构筑物,则不装配所述空中机载传输部分,所述船载无线传输模块和所述无线基站自组网通信。
13、进一步地,所述云台模块还包括:
14、若水域波浪振幅大于等于振幅预设值,所述无人船用淤积调查系统不装配所述云台模块,所述声源及水听器组、所述单波束传感器以及所述声速剖面仪直接固定于无人船底部;
15、若水域波浪振幅小于振幅预设值,所述无人船用淤积调查系统装配所述云台模块,所述云台模块固定于无人船底部,所述声源及水听器组、所述单波束传感器以及所述声速剖面仪固定于所述云台模块上。
16、进一步地,所述云台模块包括水下云台和云台控制器。
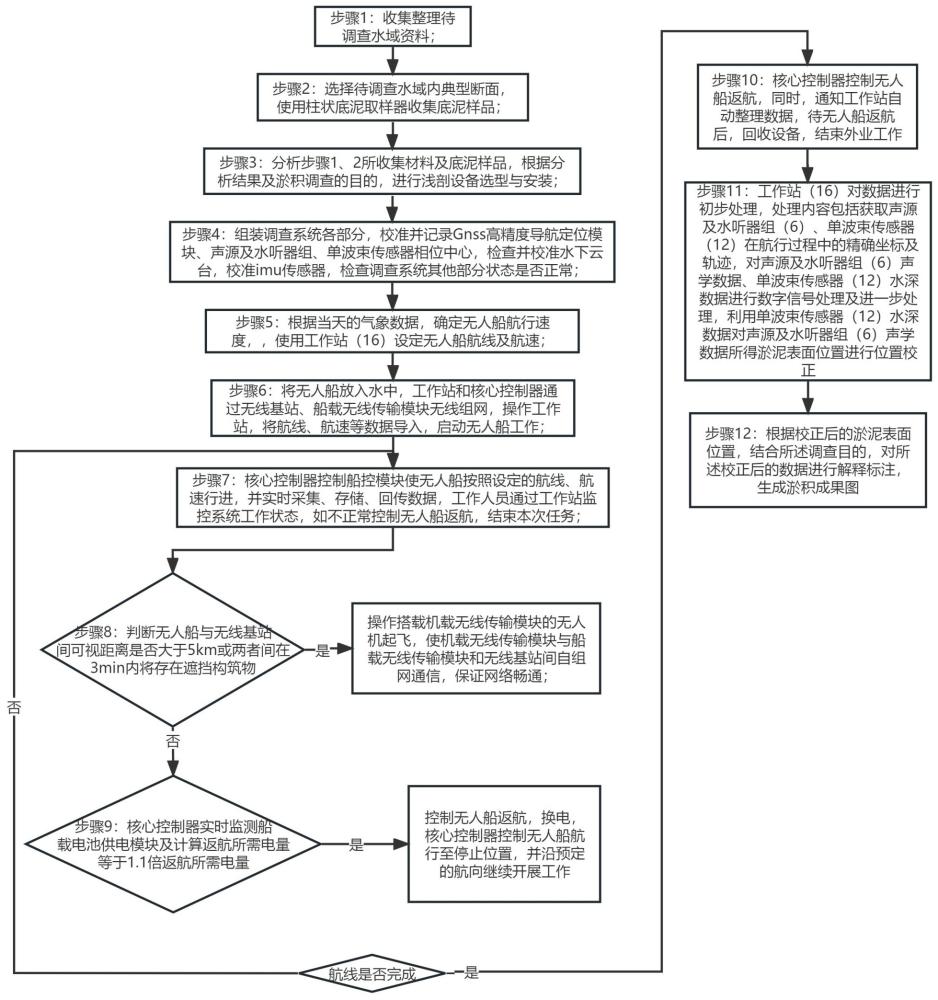
17、进一步地,一种无人船用淤积调查方法,由上述任一项所述的一种无人船用淤积调查系统执行,所述无人船用淤积调查方法包括如下步骤:
18、步骤1:收集整理待调查水域资料,所述待调查水域资料包括过往淤积调查资料、断面资料、地形资料及控制测量资料;
19、步骤2:根据所述待调查水域资料,选择待调查水域内典型断面2个至5个,使用柱状底泥取样器收集底泥样品;
20、若淤积调查目的为污染物沉积调查,增设所述典型断面,增设所述典型断面的考虑因素包括:流域面积、长度以及历史污染源位置;
21、步骤3:分析所述待调查水域资料和所述底泥样品,获得待调查水域的平均水深、淤泥密度、含水率以及厚度;
22、结合淤积调查目的,确定浅剖设备的功能和性能要求,对所述浅剖设备进行选型,并安装所述浅剖设备;
23、所述浅剖设备包括浅剖控制器、声源及水听器组;
24、步骤4:组装、布置调查系统各部分,校准并记录gnss高精度导航定位模块、声源及水听器组、单波束传感器相位中心;
25、若配置水下云台、云台控制器时,检查并校准水下云台,校准imu传感器;
26、检查所述调查系统其他部分的状态是否正常;
27、步骤5:根据所述待调查水域资料,使用工作站规划无人船航线,根据当天的气象数据,确定无人船航行速度,使用工作站设定无人船航行速度;
28、若水域波浪振幅大于等于振幅预设值,不配置水下云台;
29、步骤6:将无人船放入水中,工作站和核心控制器通过无线基站、船载无线传输模块无线组网相连,操作工作站工作,将无人船的航线数据和航速数据导入核心控制器,控制无人船启动、工作;
30、步骤7:核心控制器控制船控模块,使无人船按照所述航线数据和航速数据行进,实时采集、存储、回传数据,工作人员通过工作站监控系统工作状态;
31、步骤8:通过工作站监测无人船与无线基站之间距离和两者间可视程度,若所述距离大于5km和/或两者间在3min内将存在遮挡构筑物,工作人员操作搭载机载无线传输模块的无人机飞行至无人船与无线基站间相对无线基站高30m至100m的空域,用于无人机与无人船和无线基站之间的通视,机载无线传输模块与船载无线传输模块和无线基站间自组网通信,保证网络畅通;
32、步骤9:核心控制器实时监测船载电池供电模块电量,计算返航所需电量;
33、若当船载电池供电模块的剩余电量等于1.1倍所述返航所需电量,核心控制器记录无人船的当前位置和航向,获得所述无人船的停止位置,并停止航行,控制无人船返航,装配备用的船载电池供电模块,装载完毕后,核心控制器控制无人船航行至所述停止位置,沿所述停止位置继续开展工作;
34、步骤10:无人船完成航线航行后,核心控制器控制无人船返航,通知工作站收集外业任务、自动整理数据;
35、无人船返航后,回收设备,结束外业工作;
36、步骤11:工作站对数据进行初步处理,处理内容包括获取声源及水听器组、单波束传感器在航行过程中的精确坐标及轨迹,对声源及水听器组声学数据、单波束传感器水深数据进行数字信号处理及进一步处理,利用单波束传感器水深数据对声源及水听器组声学数据所得淤泥表面位置进行位置校正;
37、步骤12:根据校正后的淤泥表面位置,结合所述调查目的,对所述校正后的数据进行解释标注,生成淤积成果图;
38、所述淤积成果图的展示方式包括二维和三维。
39、进一步地,步骤s7中,所述监控系统工作具体包括:
40、步骤7-1:核心控制器控制无人船按照设定的航线、航速行进,同步采集gnss高精度导航定位模块rtk定位信息,用于定位和维持航线,同步采集视觉传感器、毫米波雷达传感器数据用于自动避障,同步采集并存储imu传感器姿态数据、gnss高精度导航定位模块导航电文数据、单波束传感器水深数据、声速剖面仪声速数据、浅剖控制器浅剖声学数据,核心控制器向工作站同步实时回传gnss高精度导航定位模块rtk定位信息、视觉传感器视频数据、imu传感器姿态数据、gnss高精度导航定位模块导航电文数据、单波束传感器水深数据、声速剖面仪声速数据、浅剖控制器浅剖声学数据;
41、步骤7-2:工作站根据核心控制器实时回传的gnss高精度导航定位模块的rtk定位信息,实时绘制航行轨迹图,实时显示核心控制器回传的其他数据;浅剖控制器采集的浅剖声学数据实时显示为声波影像;
42、步骤7-3:工作人员根据上述数据分析系统是否工作正常,若不正常,控制工作站发出指令命令无人船返航检修,结束本次任务;
43、步骤7-4:若选配水下云台、云台控制器,使用云台控制器采集imu传感器数据,并控制水下云台保持稳定。
44、进一步地,所述步骤11,具体包括:
45、步骤11-1:结合gnss高精度导航定位模块、声源及水听器组、单波束传感器的相位中心位置,可知三者之间的相对位置。根据gnss高精度导航定位模块获取的导航电文数据,通过ppk导航电文高精度解算、坐标变换、相位中心坐标修正处理,获得声源及水听器组和单波束传感器的绝对位置,获得声源及水听器组和单波束传感器在航行过程中的精确坐标及轨迹,从而确定单波束传感器水深数据和声源及水听器组声学数据的坐标及轨迹;
46、步骤11-2,根据记录的声速剖面仪声速数据对声源及水听器组声学数据、单波束传感器水深数据进行声速校准,使用中值滤波对声源及水听器组声学数据、单波束传感器水深数据的随机噪声进行滤波处理,降低随机噪声影响,使用低通滤波、预测反褶积、时变滤波方法充分压制直达波及多次波影响;
47、步骤11-3:利用处理后的单波束传感器水深数据对处理后的声源及水听器组声学数据所得淤泥表面位置进行位置校正,得到最终的淤泥表面位置。
48、进一步地,步骤s12中,根据校正后的淤泥表面位置,结合所述调查目的,对所述校正后的数据进行解释标注,生成淤积成果图,包括:
49、若对堤坝的根石、水下电缆以及水下其他构筑物的淤积调查,则在所述淤积成果图中标注所述构筑物的位置、淤埋深度、方向;
50、若对污染物调查,则在所述淤积成果图中标注各污染物沉积层对应的污染物含量;
51、若对以清淤为目的的淤积调查,则在所述淤积成果图中标注完整的清淤高程,划分清淤分区,并计算清淤总量及各分区清淤量。
52、本发明实施例具有以下技术效果:
53、1.本发明中,无人船用淤积调查系统包括水中数据采集部分,空中机载传输部分以及岸基监控工作部分,通过自组网,实现水中数据采集部分与岸基监控工作部分之间的数据传输和指令传达。水中数据采集部分包括电动无人船,无人船上配备传感器模块,采集淤积调查所需数据。传感器模块中各传感器的成本、体积和重量远远小于测绘专业传感器,搭载体积小、重量轻的无人船,能够快速、准确、高效完成数据采集工作。实现了淤积调查外业工作自动化,减小淤积调查工作强度,降低成本。
54、2.无人船用淤积调查系统包括空中机载传输部分,承担扩展水中数据采集部分和岸基监控工作部分通信距离的工作。根据无人船与无线基站之间距离和/或是否有遮挡构筑物,判定是否启用空中机载传输部分,克服了电动无人船与岸基通信受距离限制的问题。
55、3.本发明中无人船用淤积调查方法,根据待调查水域实际情况和调查目的,进行无人船用淤积调查系统中设备的选配;通过传感器模块进行数据采集;将采集的数据进行校正处理,得到校正后的数据;结合调查目的,对校正后的数据进行解释标注,生成淤积成果图。该方法能够快速、准确、高效的完成大小水域淤积调查工作。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226881.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表