一种长隧洞水下检测清理机器人应急失效处理设备的制作方法
- 国知局
- 2024-08-01 07:17:19
本技术涉及隧洞检测,具体为一种长隧洞水下检测清理机器人应急失效处理设备。
背景技术:
1、长距离引水隧洞是在核电引水、水利及水电工程以及其他特殊引水过程中最为常见的一种结构。这些隧洞在运行若干时间之后,普遍存在需要在有水环境下开展检测、海洋生物以及沉积泥沙等清理工作。清理过程比较复杂,尤其是,使用方除了对检测或清理效果有严格要求之外,要将“应急失效”的处置,作为硬性需求,要求设备开发商、检测清理作业服务商。所谓“应急失效”指的是设备出现故障,导致其停留在隧洞中某处,很难快速、有效清理的状态。若不能提供一种应急失效模式,则清理设备可能不被允许进入隧洞开展清理作业。
2、常规的处理方法一般是若设备故障,则在长隧洞中利用水闸门封闭之后,进行抽水,然后采用人工牵引、或在辅助吊车、机动车辅助之下进行作业。这种作业方式明显成本高,效率低下。而且从本质上否定了进行水下检测和清理作业的必要性。也有少数采用其他水下设备进行挂线缆拖曳的案例,但是,在复杂条件下继续派遣水下机器人等设备进入水文条件复杂的隧洞中,有增加新的“异物”的可能性,往往也不被使用方接受。
技术实现思路
1、本实用新型的目的在于提供一种长隧洞水下检测清理机器人应急失效处理设备,以解决上述背景技术中提出的问题。
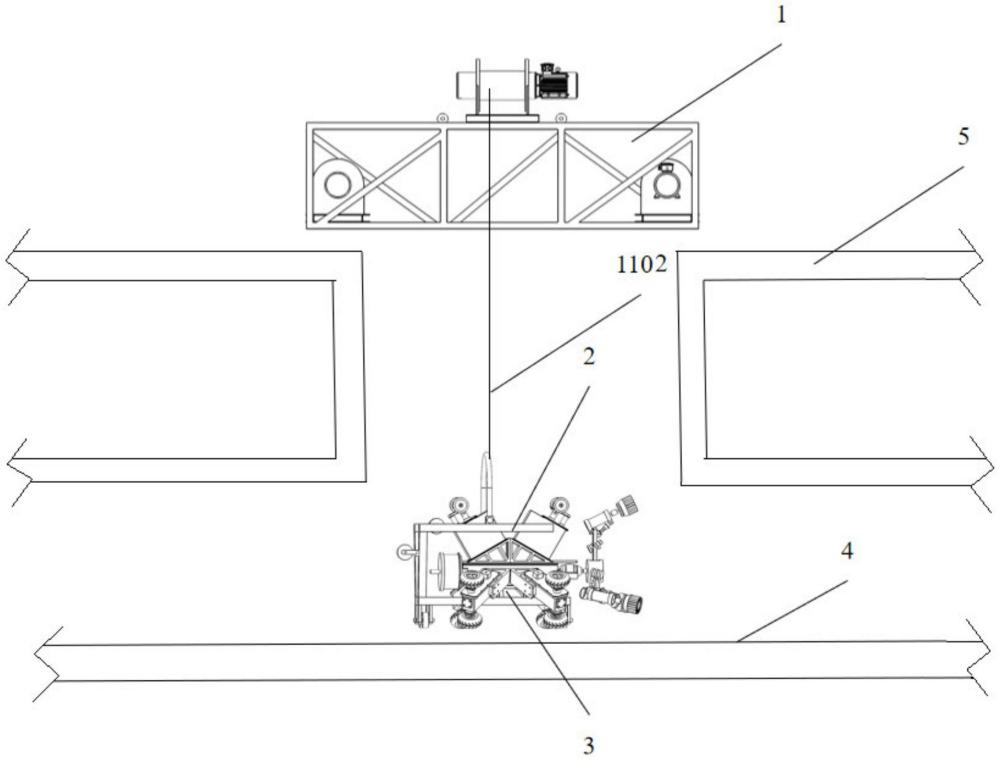
2、为实现上述目的,本实用新型提供如下技术方案:一种长隧洞水下检测清理机器人应急失效处理设备,包括三线缆绞车装置、中继器本体以及检测清理装置本体,所述检测清理装置本体安装在中继器本体中,所述三线缆绞车装置通过线缆与中继器本体相连;所述三线缆绞车装置包括起重线缆滚筒、应急线缆滚筒、光电复合线缆滚筒,其中起重线缆滚筒中配套设置有起重绞车线缆,所述起重绞车线缆垂直与中继器本体的吊环相连;所述应急线缆滚筒、光电复合线缆滚筒分别配套设置有应急拖曳线缆、光电复合水密线缆,应急线缆滚筒、光电复合线缆滚筒在三线缆绞车装置上对称设置,应急拖曳线缆、光电复合水密线缆通过定滑轮导向与检测清理装置本体相连。
3、优选的,所述三线缆绞车装置还包括绞车主体框架、光电复合线缆起重定滑轮、应急线缆起重定滑轮,所述起重线缆滚筒、应急线缆滚筒、光电复合线缆滚筒固定在绞车主体框架上,所述光电复合线缆起重定滑轮、应急线缆起重定滑轮分别固定在光电复合线缆滚筒、应急线缆滚筒内侧的绞车主体框架上,应急拖曳线缆、光电复合水密线缆分别从应急线缆起重定滑轮、光电复合线缆起重定滑轮中穿过。
4、优选的,所述应急拖曳线缆采用316l不锈钢材质钢缆制成。
5、优选的,所述中继器本体包括中继器框架、应急线缆中继定滑轮、光电复合线缆中继定滑轮,所述吊环整体呈u型结构,吊环的两端铰接在中继器框架上;所述应急拖曳线缆、光电复合水密线缆分别从应急线缆中继定滑轮、光电复合线缆中继定滑轮中穿过,并连接在检测清理装置本体上。
6、优选的,所述中继器框架底部的上侧设置有托架,所述检测清理装置本体设置在托架上;所述中继器框架底部的下侧设置有第一脚轮、第二脚轮、第三脚轮、第四脚轮,所述第一脚轮、第二脚轮、第三脚轮、第四脚轮呈矩形阵列分布设置。
7、优选的,所述检测清理装置本体包括电子舱、箱梁、水密旋转电机,所述箱梁整体呈条形结构,所述电子舱、水密旋转电机分布设置在箱梁的两端,所述应急拖曳线缆、光电复合水密线缆与电子舱相连。
8、优选的,所述箱梁的侧面设置有减速水密驱动电机、顶紧装置密封舱,其中减速水密驱动电机端部两侧安装有驱动轮组,所述顶紧装置密封舱顶部通过顶紧缸安装有顶紧轮。
9、优选的,所述减速水密驱动电机设置有两组,每组中设置两台减速水密驱动电机,两台减速水密驱动电机呈八字型安装在箱梁侧面,且两组减速水密驱动电机关于顶紧装置密封舱所在的平面相互对称。
10、优选的,所述水密旋转电机的输出端通过支撑臂安装有电动打磨刷电机,所述支撑臂呈环形阵列分布设置有多根;所述电动打磨刷电机上安装有电动打磨刷刷头。
11、优选的,所述支撑臂上安装有水下监视摄像机。
12、与现有技术相比,本实用新型的有益效果是:本实用新型通过一个三线缆绞车装置,分别释放起重绞车线缆、应急拖曳线缆、光电复合水密线缆,通过中继器本体对水下的检测清理装置本体进行释放和回收作业,并由中继器本体完成线缆引导;当检测清理装置本体在隧洞中发生故障之后,利用应急拖曳线缆进行强行拖曳,将其拖曳至原出发位置,并利用中继器本体进行回收。
技术特征:1.一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:包括三线缆绞车装置(1)、中继器本体(2)以及检测清理装置本体(3),所述检测清理装置本体(3)安装在中继器本体(2)中,所述三线缆绞车装置(1)通过线缆与中继器本体(2)相连;所述三线缆绞车装置(1)包括起重线缆滚筒(1101)、应急线缆滚筒(1201)、光电复合线缆滚筒(1301),其中起重线缆滚筒(1101)中配套设置有起重绞车线缆(1102),所述起重绞车线缆(1102)垂直与中继器本体(2)的吊环(2102)相连;所述应急线缆滚筒(1201)、光电复合线缆滚筒(1301)分别配套设置有应急拖曳线缆(1202)、光电复合水密线缆(1302),应急线缆滚筒(1201)、光电复合线缆滚筒(1301)在三线缆绞车装置(1)上对称设置,应急拖曳线缆(1202)、光电复合水密线缆(1302)通过定滑轮导向与检测清理装置本体(3)相连。
2.根据权利要求1所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述三线缆绞车装置(1)还包括绞车主体框架(1401)、光电复合线缆起重定滑轮(1402)、应急线缆起重定滑轮(1403),所述起重线缆滚筒(1101)、应急线缆滚筒(1201)、光电复合线缆滚筒(1301)固定在绞车主体框架(1401)上,所述光电复合线缆起重定滑轮(1402)、应急线缆起重定滑轮(1403)分别固定在光电复合线缆滚筒(1301)、应急线缆滚筒(1201)内侧的绞车主体框架(1401)上,应急拖曳线缆(1202)、光电复合水密线缆(1302)分别从应急线缆起重定滑轮(1403)、光电复合线缆起重定滑轮(1402)中穿过。
3.根据权利要求1所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述应急拖曳线缆(1202)采用316l不锈钢材质钢缆制成。
4.根据权利要求1所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述中继器本体(2)包括中继器框架(2101)、应急线缆中继定滑轮(2201)、光电复合线缆中继定滑轮(2202),所述吊环(2102)整体呈u型结构,吊环(2102)的两端铰接在中继器框架(2101)上;所述应急拖曳线缆(1202)、光电复合水密线缆(1302)分别从应急线缆中继定滑轮(2201)、光电复合线缆中继定滑轮(2202)中穿过,并连接在检测清理装置本体(3)上。
5.根据权利要求4所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述中继器框架(2101)底部的上侧设置有托架(2103),所述检测清理装置本体(3)设置在托架(2103)上;所述中继器框架(2101)底部的下侧设置有第一脚轮(2301)、第二脚轮(2302)、第三脚轮(2303)、第四脚轮(2304),所述第一脚轮(2301)、第二脚轮(2302)、第三脚轮(2303)、第四脚轮(2304)呈矩形阵列分布设置。
6.根据权利要求1所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述检测清理装置本体(3)包括电子舱(301)、箱梁、水密旋转电机(3301),所述箱梁整体呈条形结构,所述电子舱(301)、水密旋转电机(3301)分布设置在箱梁的两端,所述应急拖曳线缆(1202)、光电复合水密线缆(1302)与电子舱(301)相连。
7.根据权利要求6所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述箱梁的侧面设置有减速水密驱动电机(3101)、顶紧装置密封舱(3201),其中减速水密驱动电机(3101)端部两侧安装有驱动轮组(3102),所述顶紧装置密封舱(3201)顶部通过顶紧缸(3203)安装有顶紧轮(3202)。
8.根据权利要求7所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述减速水密驱动电机(3101)设置有两组,每组中设置两台减速水密驱动电机(3101),两台减速水密驱动电机(3101)呈八字型安装在箱梁侧面,且两组减速水密驱动电机(3101)关于顶紧装置密封舱(3201)所在的平面相互对称。
9.根据权利要求6所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述水密旋转电机(3301)的输出端通过支撑臂安装有电动打磨刷电机(3302),所述支撑臂呈环形阵列分布设置有多根;所述电动打磨刷电机(3302)上安装有电动打磨刷刷头(3303)。
10.根据权利要求9所述的一种长隧洞水下检测清理机器人应急失效处理设备,其特征在于:所述支撑臂上安装有水下监视摄像机(3304)。
技术总结本技术涉及隧洞检测技术领域,具体公开了一种长隧洞水下检测清理机器人应急失效处理设备,包括三线缆绞车装置、中继器本体以及检测清理装置本体,所述检测清理装置本体安装在中继器本体中,所述三线缆绞车装置通过线缆与中继器本体相连;所述三线缆绞车装置包括起重线缆滚筒、应急线缆滚筒、光电复合线缆滚筒,其中起重线缆滚筒中配套设置有起重绞车线缆,所述起重绞车线缆与中继器本体的吊环相连;所述应急线缆滚筒、光电复合线缆滚筒分别配套设置有应急拖曳线缆、光电复合水密线缆,应急线缆滚筒、光电复合线缆滚筒在三线缆绞车装置上对称设置,且通过定滑轮导向与检测清理装置本体相连;实现了对水下检测清理装置进行释放和回收作业。技术研发人员:金国龙,李鸿桥,徐康迪,胡世南,张永来,陈懿,康靖宇受保护的技术使用者:中船第九设计研究院工程有限公司技术研发日:20230921技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/226918.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表