一种防溺水智能监控与救援方法
- 国知局
- 2024-08-01 07:22:53
本发明涉及安全救援,尤其涉及一种防溺水智能监控与救援方法。
背景技术:
1、在救援过程中,救援船和落水人员之间准确的位置关系是落水人员能够被快速救援的关键,但是现有的救援船大多是基于落水人员的gps坐标作为固定位置进行救援,但是在水上救援,特别是海上救援,由于海浪的影响,落水人员处于一种动态中,位置随时在变化,造成初始的gps位置处于时刻变化中,给救援造成了较大的困难。
技术实现思路
1、基于背景技术存在的技术问题,本发明提出了一种防溺水智能监控与救援方法,提高了落水人员的救援时效性。
2、本发明提出的一种防溺水智能监控与救援方法,包括如下步骤:
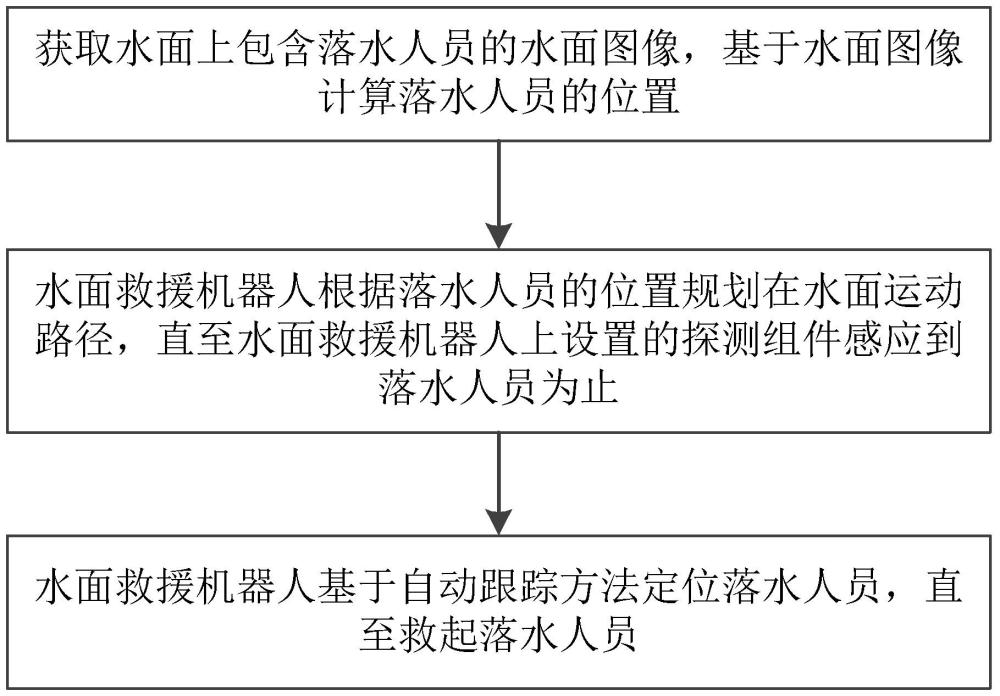
3、s1、获取水面上包含落水人员的水面图像,基于水面图像计算落水人员的位置;
4、s2、水面救援机器人根据落水人员的位置规划在水面运动路径,直至水面救援机器人上设置的探测组件感应到落水人员为止;
5、s3、水面救援机器人基于自动跟踪方法定位落水人员,直至救起落水人员;
6、s31、初始化待跟踪轨迹点队列以及循环变量,所述待跟踪轨迹点队列为系统程序根据落水人员位置自动规划的路径跟踪轨迹点,为待跟踪轨迹点队列中追踪点的总个数,为待跟踪轨迹点队列中第个追踪点;
7、s32、遍历待跟踪轨迹点队列,以寻找第个待追踪点;
8、s33、由船载卫星导航的经纬度直接获取水面救援机器人的实时位置,基于水面救援机器人的实时位置以及下一个待追踪点的位置,计算得到水面救援机器人的目标方位角以及水面救援机器人与待追踪点之间的距离,从而更新水面救援机器人当前的航向偏差以及横向距离偏差;
9、s34、将水面救援机器人当前的航向偏差以及横向距离偏差作为船舶横向距离控制器的输入,基于船舶横向距离控制器输出的控制量调控水面救援机器人的行驶轨迹;
10、s35、判断水面救援机器人的行驶结束后与待追踪点之间的距离是否小于设定阈值,若是,则进入步骤s36,若不是,则返回步骤s33;
11、s36、则达到当前待追踪点,另,判断是否小于,若是则循环进入步骤s32,若不是,则救起落水人员。
12、进一步地,步骤s1具体包括:
13、s11、计算相机所获取的水面图像中落水人员中心在像素坐标系下的坐标;
14、s12、利用畸变模型对相机模型内在参数的相机畸变进行修正,获取相机标定参数矩阵,通过相机标定参数矩阵将像素坐标系下的坐标转换到世界坐标系下的坐标,所述世界坐标系下的坐标对应为落水人员的位置。
15、进一步地,在步骤s12中,利用畸变模型对相机内在参数的相机畸变进行修正,获取相机标定参数矩阵,具体为:
16、利用个已知的世界坐标系下的坐标及对应的像素坐标系下的坐标,采用直线线性变换得到相机投影矩阵p中的每个元素;
17、基于机投影矩阵p得到个已知且标定的世界坐标系下的坐标及对应的像素坐标系下的坐标之间的线性方程组矩阵,其中,表示相机的内参矩阵,表示相机参数,表示个像素坐标系下的坐标组成的矩阵;
18、利用最小二乘法解得相机参数;
19、基于相机参数得到相机标定参数矩阵。
20、进一步地,在步骤s12中,通过相机标定参数矩阵将像素坐标系下的坐标转换到世界坐标系下的坐标,具体为:
21、在相机模型中,建立任意空间点的世界坐标系,通过世界坐标系到相机坐标系的刚体转换、相机坐标系到图像坐标系的透视投影变换以及图像坐标系与像素坐标系之间的坐标转换,实现通过相机标定参数矩阵将像素坐标系下的坐标转换到世界坐标系下的坐标。
22、进一步地,在步骤s33中,水面救援机器人的目标方位角以及水面救援机器人与待追踪点之间的距离计算公式如下:
23、
24、
25、其中,表示上一个待追踪点的位置,表示船载卫星导航的经纬度对应的水面救援机器人的实时位置,表示下一个待追踪点的位置,表示地球半径。
26、进一步地,在步骤s34中,船舶横向距离控制器所输出控制量的计算公式如下:
27、
28、
29、其中,表示时刻船舶横向距离控制器输出的控制量,表示时刻船舶横向距离控制器输出的控制量,表示控制变化量,、、分别表示横向距离pid控制器的比例、积分、微分系数,表示时刻的横向距离偏差,表示时刻的横向距离偏差,表示时刻的横向距离偏差。
30、本发明提供的一种防溺水智能监控与救援方法的优点在于:本发明结构中提供的一种防溺水智能监控与救援方法,首先利用畸变模型对相机模型内在参数的相机畸变进行修正,以提高像素坐标系与世界坐标系之间转化的准确性,获得落水人员更准确的位置,从而为落水人员的获救提供了更准确的信息,提高了落水人员被准确救援的时效性;另外水面救援机器人首先利用所转化得到的落水人员的位置进行规划行驶轨迹,但是由于基于相机获取到的落水人员位置,以及落水人员在水面救援机器人到来之前存在一定的漂浮位移,改变了初始位置,因而本实施例在水面救援机器人上探测组件能探测到落水人员时,将不按照实现规划的路径形式,转为基于自动跟踪方法定位落水人员,从而更快的获取到落水人员的落水位置,进而提高了落水人员的救援时效性。
技术特征:1.一种防溺水智能监控与救援方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的防溺水智能监控与救援方法,其特征在于,步骤s1具体包括:
3.根据权利要求2所述的防溺水智能监控与救援方法,其特征在于,在步骤s12中,利用畸变模型对相机内在参数的相机畸变进行修正,获取相机标定参数矩阵,具体为:
4.根据权利要求3所述的防溺水智能监控与救援方法,其特征在于,在步骤s12中,通过相机标定参数矩阵将像素坐标系下的坐标转换到世界坐标系下的坐标,具体为:
5.根据权利要求1所述的防溺水智能监控与救援方法,其特征在于,在步骤s33中,水面救援机器人的目标方位角以及水面救援机器人与待追踪点之间的距离计算公式如下:
6.根据权利要求5所述的防溺水智能监控与救援方法,其特征在于,在步骤s34中,船舶横向距离控制器所输出控制量的计算公式如下:
技术总结本发明公开了一种防溺水智能监控与救援方法,涉及安全救援技术领域,包括如下步骤:获取水面上包含落水人员的水面图像,基于水面图像计算落水人员的位置;水面救援机器人根据落水人员的位置规划在水面运动路径,直至水面救援机器人上设置的探测组件感应到落水人员为止;水面救援机器人基于自动跟踪方法定位落水人员,直至救起落水人员;该防溺水智能监控与救援方法能够获得落水人员更准确的位置,从而为落水人员的获救提供了更准确的信息,提高了落水人员被准确救援的时效性。技术研发人员:余道洋,张凯受保护的技术使用者:中国科学院合肥物质科学研究院技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/227319.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表