一种轮距调节机构、车轮结构及农业机器人的制作方法
- 国知局
- 2024-08-01 07:32:53
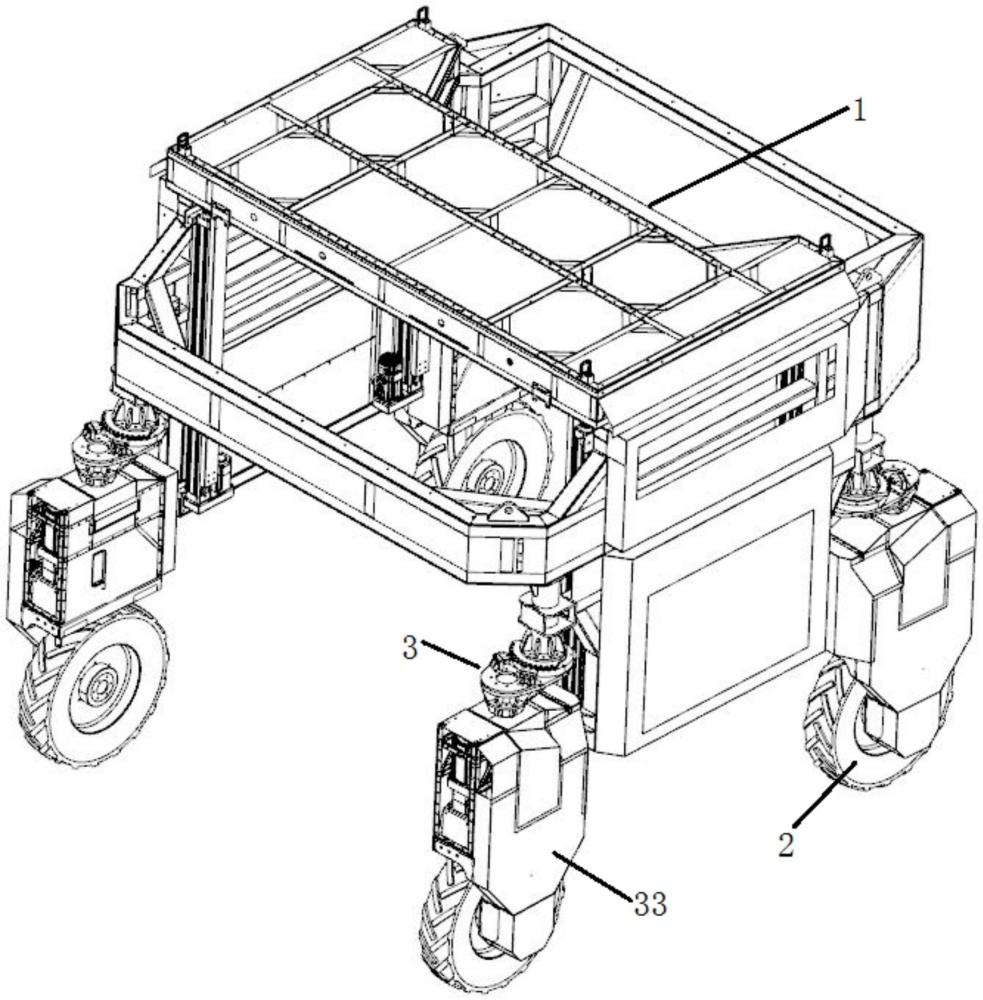
本技术涉及一种轮距调节机构、车轮结构及具有该车轮结构的农业机器人,属于农业机器人。
背景技术:
1、农业生产中,农机的参与极大提升了生产效率,近年来出现的智能农业机器人,由于作业精准,环境友好(大部分采用电能驱动),定制化程度高,得到了迅速的发展。但是田间实际投入使用的机器人,轮距无法做到快速调节,只能在田垄宽度和轮距宽度相等的田间行驶作业。另一种办法是从种植阶段即从田垄种植间距的宽度上适配农业机器人的轮距宽度,但是由于农业机器人更新换代快,通过改变田垄种植间距的宽度去适配农业机器人的轮距可行性不高。
2、从传统农机的动力底盘移植到农业机器人上,几乎无法改造成轮距可调节形式。某些拖拉机的前轮可以人工拆卸,用目视或测量的方法选择车轮新的安装位置,再重新安装车轮。但拖拉机前轮是随动轮,没有动力部分,轮距调节较为简单,精准度又比较差。而采用农机动力底盘的农业机器人,结构复杂,不适合拖拉机随动轮轮距调节的这种方式。
3、对于高地隙车架的农业机器人目前的技术方案是采用液压油缸,同时使车轮方向与轮距调节方向一致实现轮距调节。例如专利201420111813.3《高地隙喷药机轮距调节机构》即采用这种方式。但是液压油缸成本高,容易漏油,导致调节精度下降。现有市面上还有一种进口抽雄机,轮距调节方式是车体反复前后移动,两侧车轮朝向为“外八”或“内八”方向,配合液压油缸的推动或收缩,实现轮距的调节,实际使用中,这种方式对车体结构强度要求极高,车体因为反复前后移动,对减震机构的损耗很大,致使整车寿命降低,故障率增高,不适合应用于精密电子设备较多的智能农业机器人上。
4、目前田间行走的农业机器人尚无能够快速调节轮距的措施,严重限制了农业机器人高度定制化优势的发挥。
技术实现思路
1、为解决现有技术的不足,本实用新型提供一种轮距调节机构、车轮结构及农业机器人,该车轮调节机构能够便于车轮结构间的间距调节,提高了农业机器人的适用性。
2、本实用新型所采用的技术方案为:
3、一种轮距调节机构,包括:
4、连接杆,与车体固定连接;
5、支撑杆,与车轮结构转动连接,并与连接杆错位设置;
6、固定板,安装在支撑杆顶部,且一端朝向连接杆底端水平延伸;
7、固定半齿,安装在连接杆底端,且执行端朝向支撑杆上方设置;
8、转动轴承,内环与固定半齿下方的连接杆端部过盈配合,外环与连接杆下方的固定板相连;
9、半齿调节机构,设置有多组并安装在支撑杆上方的固定板上,包括:
10、支撑板,顶部螺纹连接有若干个尾端朝向固定半齿延伸的螺丝;
11、活动半齿,设置在若干个螺丝的尾端,螺丝的端部旋入活动半齿板体内;
12、通过轴向移动螺丝与活动半齿,使活动半齿与固定半齿脱离啮合状态或保持啮合状态;
13、在活动半齿与固定半齿脱离啮合状态时,转动支撑杆以改变车轮结构间的间距。
14、优选地,在固定板上还安装有活动齿固定座,多个半齿调节机构安装在活动齿固定座上。
15、一种车轮结构,带有任一上述的轮距调节机构,还包括:
16、固定框,顶部中心处安装有支撑架,外侧底部安装有轮板;轮距调节机构位于支撑架上方,且支撑架与支撑杆对应设置;
17、车轮,通过转轴转动设置在位于固定框下方的轮板内侧;
18、行进驱动机构,设置在固定框顶部一侧,用于驱动车轮转动;
19、转向驱动机构,用于驱动车轮转向,包括:
20、连接板,安装在支撑架顶部,且一端朝向远离行进驱动机构的一侧延伸;
21、转向减速机,安装在连接板末端,且执行轴向上穿插过连接板并在执行轴末端安装有主动齿轮;
22、转向伺服电机,安装在转向减速机底部并与转向减速机传动连接;
23、从动齿轮,与轮距调节机构的支撑杆底端固定连接并与主动齿轮相啮合;从动齿轮内部安装有转向轴承,转向轴承的外环与从动齿轮固定相连,内环与连接板相连;
24、转向伺服电机动作时,带动主动齿轮沿着从动齿轮转动,并同步带动连接板以及车轮相对轮距调节机构的支撑杆转动。
25、优选地,所述的行进驱动机构包括:
26、动力减速机,设置在固定框上;
27、动力伺服电机,设置在动力减速机顶部并与动力减速机传动连接;
28、传动带,环绕设置在动力减速机的主动带轮和转轴上的从动带轮上;
29、动力伺服电机驱动动力减速机动作以带动动力减速机上的主动带轮转动,并通过传动带带动从动带轮转动以及转轴转动继而带动车轮转动。
30、优选地,在固定框外侧还安装有用于调节传动带张紧度的调节组件,所述调节组件包括:
31、转动电机,执行轴上安装有朝向传动带延伸的支板;
32、张力调节轮,转动安装在支板末端并与传动带贴合。
33、优选地,还包括动力电池,架设在支撑架一侧的固定框上,,用于为行进驱动机构、转向驱动机构以及调节组件供电。
34、优选地,在行进驱动机构、转向驱动机构外还设置有防护壳体。
35、优选地,所述的支撑架为升降式结构。
36、一种农业机器人,包括任一上述的轮距调节机构,和/或多组任一上述的车轮结构。
37、本实用新型的有益效果在于:
38、1、设计巧妙且操作方便;通过改变活动半齿与固定半齿间的啮合状态,以满足轮距间的调节需求以及固定需求;且该轮距调节机构与车轮机构集成在农业机器人的车体上,在不借助外在辅助工装和起重机等设备帮助下即可实现轮距宽度的快速调节,提升了作业效率,同时也不影响车体其他组件的功能使用,车体承重不受影响,结构足够稳固。
39、2、可定制化程度高;轮距调节机构的齿轮模数和齿宽可以针对使用场景进行定制化设计,以使其符合不同种植宽度的农田。
40、3、加工生产方便;该设计所用的电子器件均采用市面上现有的产品。机械结构件设计难度低,适合批量化生产,降低了农业机器人轮距调节功能的生产成本。
技术特征:1.一种轮距调节机构,其特征在于,包括:
2.根据权利要求1所述的轮距调节机构,其特征在于,在固定板上还安装有活动齿固定座,多个半齿调节机构安装在活动齿固定座上。
3.一种车轮结构,带有权利要求1任一所述的轮距调节机构,其特征在于,还包括:
4.根据权利要求3所述的车轮结构,其特征在于,所述的行进驱动机构包括:
5.根据权利要求3所述的车轮结构,其特征在于,在固定框外侧还安装有用于调节传动带张紧度的调节组件,所述调节组件包括:
6.根据权利要求5所述的车轮结构,其特征在于,还包括动力电池,架设在支撑架一侧的固定框上,用于为行进驱动机构、转向驱动机构以及调节组件供电。
7.根据权利要求3所述的车轮结构,其特征在于,在行进驱动机构、转向驱动机构外还设置有防护壳体。
8.根据权利要求3所述的车轮结构,其特征在于,所述的支撑架为升降式结构。
9.一种农业机器人,其特征在于,包括如权利要求1-2任一所述的轮距调节机构,和/或多组如权利要3-8任一所述的车轮结构。
技术总结本技术公开了一种轮距调节机构、车轮结构及农业机器人,轮距调节机构中,连接杆与车体固定连接;支撑杆与车轮结构转动连接并与连接杆错位设置;固定板安装在支撑杆顶部且一端朝向连接杆底端水平延伸;固定半齿安装在连接杆底端;转动轴承的内环与固定半齿下方的连接杆端部过盈配合,外环与连接杆下方的固定板相连;半齿调节机构设置有多组并安装在支撑杆上方的固定板上,且支撑板顶部螺纹连接有若干个螺丝;活动半齿设置在若干个螺丝的尾端,螺丝的端部旋入活动半齿板体内;通过轴向移动螺丝与活动半齿,使活动半齿与固定半齿脱离啮合状态或保持啮合状态;在活动半齿与固定半齿脱离啮合状态时,转动支撑杆以改变车轮结构间的间距。技术研发人员:陈献辉,邢志博,李轩受保护的技术使用者:新疆九御科技有限公司技术研发日:20231215技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/227840.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表