一种电梯导轨巡检仪
- 国知局
- 2024-08-01 04:37:35
本发明涉及电梯检测,具体涉及是一种电梯导轨巡检仪。
背景技术:
1、如今高楼林立,电梯能否平稳安全地运行显得尤为重要,电梯具有两根相对竖立设置的电梯导轨和运行安装于两电梯导轨之间的电梯轿厢;电梯导轨垂直度、平行度等形位参数,不仅会影响电梯的舒适性与寿命,甚至带来一定的安全隐患,如电梯导轨垂直度偏差过大会引起电梯摆动颠簸,而顶面间距偏差过大易造成电梯水平晃动,此外这些偏差也会加重电梯导轨与轿厢导靴的磨损,电梯导轨的形位偏差不仅会在制造、运输、安装等过程中产生,而且电梯井道混凝土的收缩变形、地基沉降等因素也易引起导轨的形位偏差。
2、《电梯安装验收规范》对电梯导轨的形位偏差作出了明确的要求:关于导轨工作面垂直度偏差的规定,即测量每列导轨工作面(包括侧面与顶面)相对安装基准线每5m 长度内的偏差,应不大于下列数值:a)轿厢导轨和设置有安全钳的对重导轨为0.6 mm;b)不设安全钳的t型对重导轨为1.0 mm;关于导轨顶面间距偏差的规定,即测量两列导轨不同区域顶面间的距离值,其距离值的允许偏差为:a)轿厢导轨为mm;b)对重导轨为mm。
3、而目前针对电梯导轨形位偏差的检测仍普遍采用吊重锤线、校轨尺等传统的人工测量法,测量烦琐,精度低,且难以适应现代高层建筑的电梯,因此实现对电梯导轨形位偏差的自动化巡检将具有重要的意义与应用价值。为此中国发明专利cn107416627a提出的一种电梯t型导轨多参数检测系统及方法,其结构包括电梯导轨攀爬机器人,所述电梯导轨攀爬机器人包括:控制系统、接近传感器、导轨接头检测传感器、激光测距传感器和二维位置敏感探测器,其中,所述导轨接头检测传感器设置于所述电梯导轨攀爬机器人的顶部,且与所述控制系统相连,用于检测电梯导轨长度;所述接近传感器设置于所述电梯导轨攀爬机器人的顶部,并位于电梯轨道压板的上方,且与所述控制系统相连,用于测量电梯导轨支架及压板位置;所述激光测距传感器设置于所述电梯导轨攀爬机器人的中部,且与所述控制系统相连,用于测量电梯导轨轨距;所述二维位置敏感探测器设置于所述电梯导轨攀爬机器人的尾部,且与所述控制系统相连,用于测量电梯导轨垂直度;应用时,对电梯导轨轨距检测时,电梯导轨攀爬机器人安装到导轨后,手动测量激光测距传感器发射面到电梯导轨攀爬机器人所在导轨顶面的距离,将测量得数据输入到便携式工控机,然后激光测距传感器测得其发射面与对面导轨顶面之间的距离,并将其发送给mcu进行计算,得到电梯导轨的轨距;对电梯导轨垂直度检测时,当二维位置敏感探测器检测到激光铅垂仪发射的激光铅垂线时,mcu根据二维位置敏感探测器发送的位置信号进行计算得到二维坐标,通过与基准点对比,计算出当前二维坐标偏差,得到电梯导轨的垂直度偏差。由于此电梯导轨攀爬机器人在对电梯导轨垂直度检测时,是通过二维位置敏感探测器检测激光铅垂仪发射的激光铅垂线,而激光铅垂仪放置于电梯井道底坑地面上,二维位置敏感探测器跟随电梯导轨攀爬机器人沿电梯导轨升降,众所周知激光在传播的过程中会随距离增加而逐渐发散,这将导致二维位置敏感探测器与激光铅垂仪的距离越远,电梯导轨垂直度检测的精度越低,再有,电梯井道底坑的地面往往不平坦,因此还需要对激光铅垂仪进行校正以确保能垂直向上发射激光,操作烦琐且容易产生误差。
4、有鉴于此,本技术对上述问题进行深入研究,遂由本案产生。
技术实现思路
1、本发明的目的在于提供一种能准确检测电梯导轨垂直度与顶面间距偏差,且检测精度不受激光发散的影响,同时电梯导轨垂直度检测装置能自动快速地垂直校正的电梯导轨巡检仪。
2、为了实现上述目的,本发明采用如下技术方案:
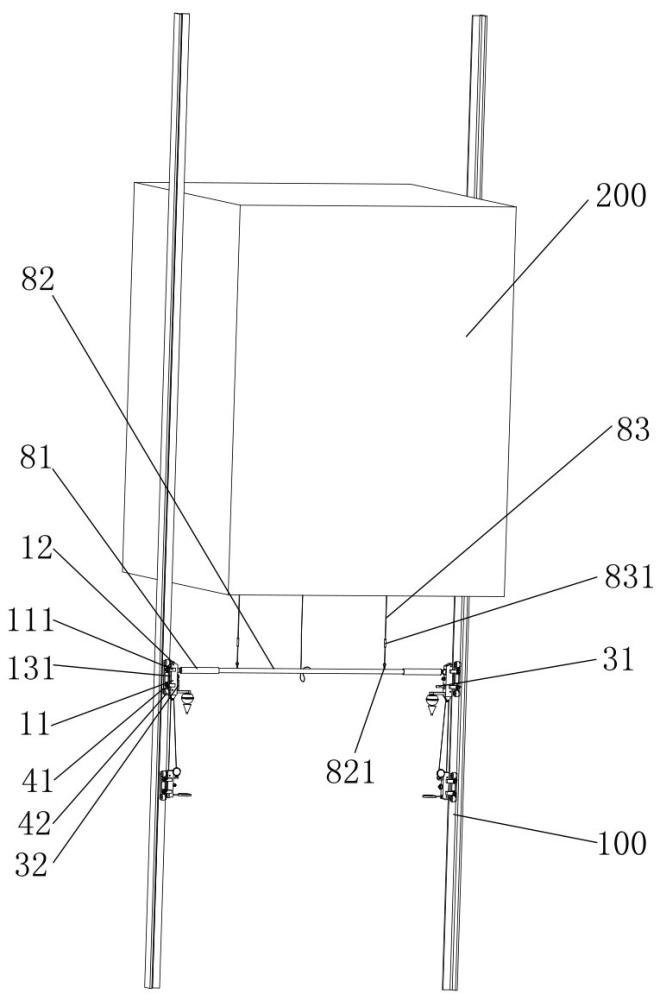
3、一种电梯导轨巡检仪,包括导轨攀爬机器人和检测装置,导轨攀爬机器人运行安装在电梯导轨上,检测装置具有垂直度检测装置和导轨顶面间距检测装置,垂直度检测装置具有上下相对设置的激光发射器和二维psd位置检测仪,导轨顶面间距检测装置具有横向相对设置的激光测距仪和激光反射面;两电梯导轨上均安装有上述导轨攀爬机器人,两上述导轨攀爬机器人横向正相对设置,上述导轨攀爬机器人具有沿导轨上下运行配合的上外车体、下外车体、上内车体和下内车体,以两电梯导轨相对的方向为左右方向,上外车体和下外车体均具有前后相对设置的车体,两车体分为第一车体和第二车体,两车体对应与电梯导轨的前、后两侧面运行配合,上内车体和下内车体均安装在两电梯导轨相对的导轨顶面上,第一车体为与电梯导轨硬接触的硬性导向车,第二车体为与电梯导轨软接触的弹性压紧车,上内车体和下内车体上均为与电梯导轨硬接触的硬性顶紧车,上述硬性顶紧车以能前后调节位置的方式与上述第一车体连接在一起,上述弹性压紧车以能前后调节的方式与上述硬性顶紧车连接在一起,处于下方的下内车体上安装有与上内车体连接并能相对于上内车体作上下移动的吊绳升降装置,左右相对的两上内车体之间连接有能左右伸缩调节间距并能周向扭转调节的伸缩扭转支架,伸缩扭转支架上具有与电梯轿厢固定连接并能上下调节的连接装置;
4、上述激光测距仪安装于其一上内车体上、上述激光反射面安装在另一上内车体上,两下内车体上均安装有上述二维psd位置检测仪,两上内车体均安装有与二维psd位置检测仪上下正对位设置的垂准仪安装架,上述垂准仪安装架上安装有垂准仪,上述垂准仪具有内球体、外球体和慢流动性填充液,上述内球体安装在垂准仪安装架上,上述外球体套设于内球体外,并通过吊绳与垂准仪安装架安装,上述激光发射器安装在外球体的底面上,上述内球体呈中空结构并与外球体相连通配合,外球体和内球体内均填充有上述慢流动性填充液,上述内球体内具有限制慢流动性填充液流动的外限流结构,上述外球体内设有处于内球体内并位于外限流结构范围内的内限流结构。
5、上述硬性顶紧车具有顶面轮架和顶面轮,顶面轮架为沿上下方向延伸的条形框架,上述条形框架上凸设有沿左右方向延伸并处于第一车体外的第一延伸杆和处于第二车体外的第二延伸杆,上述第一延伸杆以能相对第一车体前后调节的方式与第一车体连接,上述第二延伸杆以能相对第二车体前后弹性调节的方式与第二车体连接。
6、上述硬性导向车具有导向轮和导向轮架,上述导向轮架沿上下方向延伸的条形框架,上述导向轮架的上下两端端面均凹设有前后贯穿的导向轮槽,上述导向轮为沿左右方向横卧的圆柱轮体,此圆柱轮体为表面光整的金属轮,导向轮通过轮轴转动安装于导向轮槽内,且导向轮沿前后方向凸出导向轮槽外,并与电梯导轨相贴配合,上述第一延伸杆上一体成型有与导向轮架前后相对的第一安装套,上述导向轮架上凸设有穿过第一安装套的第一安装杆,上述第一安装杆的端部螺装有第一锁紧螺母,上述第一安装套处于第一锁紧螺母与上述导向轮架之间,且上述第一安装杆外套设有夹紧于第一安装套与导向轮架之间的调整垫片。
7、上述弹性压紧车具有压紧轮和压紧轮架,上述压紧轮架为沿上下方向延伸的条形板体,上述压紧轮架的上下两端均凹设有前后贯穿的压紧轮槽,上述压紧轮通过轮轴转动安装于压紧轮槽内,且压紧轮沿前后方向凸出压紧轮槽外,并与电梯导轨相贴配合,上述压紧轮为沿左右方向横卧设置的圆柱轮体,上述压紧轮外套设有橡胶套,上述第二延伸杆上一体成型有与压紧轮架前后相对的第二安装套,上述压紧轮架上凸设有穿过第二安装套的第二安装杆,上述第二安装杆的端部螺装有第二锁紧螺母,上述第二安装套处于第二锁紧螺母与上述压紧轮架之间,且上述第二安装杆外套设有夹紧于第二安装套与压紧轮架之间的弹性复位件。
8、上述顶面轮为金属轮,上述顶面轮的轮面为向外凸的凸弧面,上述顶面轮架的上下两端凹设有供顶面轮容置于内的安装槽,上述顶面轮架朝向电梯导轨的一面安装有处于两安装槽之间并能与电梯导梯相吸配合的吸紧件,上述吸紧件具有磁铁和磁铁支架,上述磁铁支架为沿上下方向延伸的中空条形块体,上述磁铁固定安装于上述磁铁支架内,上述顶面轮架朝向电梯导轨的一面凹设有沿上下方向延伸的条形凹槽,上述磁铁支架以能沿顶面轮架左右方向平移的方式容置于上述条形凹槽内,上述磁铁支架上一体成型有沿左右方向横卧设置并背向电梯导轨方向延伸穿出顶面轮架外的安装销轴,上述安装销轴外螺装有处于顶面轮架外的锁紧螺母。
9、处于下方的两顶面轮架相对的对立面上均布置有电机座,上述电机座的后侧面上安装有沿前后方向横卧的驱动电机,上述驱动电机的输出轴向前穿过上述电机座,上述驱动电机的输出轴外套装有主动齿轮,上述主动齿轮的上方设有从动齿轮,从动齿轮与主动齿轮相啮合上述从动齿轮上设有沿前后方向横卧设置的卷绳筒,卷绳筒转动安装在顶面轮架上并处于驱动电机上方,上述卷绳筒上缠绕有钢丝绳,上述钢丝绳的第一端端部与上述卷绳筒固定,处于上方的顶面轮架的底面向下凸设有前后相对设置的耳板,两耳板之间转动安装有绕绳轮,上述钢丝绳的第二端向上延伸绕过绕绳轮并向下延伸至处于下方的顶面轮架上与此顶面轮架固定连接,上述驱动电机、主动齿轮、从动齿轮、卷绳筒、绕绳轮及钢丝绳构成所述的吊绳升降装置。
10、上述伸缩扭转支架具有套装杆和调节杆,套装杆设置有二根,二套装杆左右相对设置,调节杆处于二套装杆之间,调节杆的两端部对应活动套入两套装杆内,套装杆与处于上方的顶面轮架通过铰接片以能上下相对转动的方式活动铰接在一起,上述调节杆上方竖立设置有两根左右间隔排列的刚性杆,上述调节杆与两根刚性杆的下端均以吊环的形式连接,两根刚性杆的上端与电梯轿厢底部相连,刚性杆上设有调节刚性杆长短的螺纹伸缩调节装置,上述刚性杆与上述螺纹伸缩调节装置构成所述的连接装置。
11、处于上方的两顶面轮架中,其一顶面轮架朝向另一顶面轮架的一面上凸设有沿上下方向延伸的凸台,另一顶面轮架上安装有与凸台相对设置的上述激光测距仪,凸台朝向激光测距仪的一面为平整光洁的光面,此光面为所述的激光反射面;处于下方的两顶面轮架相对的对立面上均凸设有凸杆,两凸杆相对的对立端均一体成型有平放横卧的安装台,上述二维psd位置检测仪安装在安装台上,处于上方的两顶面轮架相对的对立面下部均凸设有沿左右方向横卧设置的横杆体,此横杆体与凸杆上下正对位,横杆体为所述的垂准仪安装架。
12、上述内球体的顶面向上凸设有具有外螺纹的螺纹管,上述螺纹管伸入垂准仪安装架内与垂准仪安装架螺合安装,上述内球体的底面开设有供内限流结构伸入于内的伸入孔,上述内球体的中空腔室上部内一体成型有将内球体的中空腔室分隔成上腔室和下腔室的分隔板,分隔板的中心区域处开设有供上腔室与下腔室相连通的连通孔,连通孔、伸入孔与螺纹管均相互同轴设置,且分隔板的上顶面为向连通孔方向倾斜的倒锥面,上述内球体内位于下腔室的内腔壁上一体成型有若干片沿周向间隔均匀环绕分布的限流片,限流片的上端与分隔板的底面相贴一体成型连接,各限流片之间围成有一沿上下方向延伸的中间空间,中间空间的中心位于伸入孔的轴线上,各限流片与分隔板构成所述的外限流结构。
13、上述外球体具有上球体和下球体,上述上球体与下球体螺合连接,上述上球体为上下两端敞开的中空壳体,且上球体的上端端口口径小于内球体的最大外径,下球体的下底面中心区域处向下凸设有重锤安装座,上述重锤安装座的底面上螺装有平衡重锤,平衡重锤呈由上至下渐缩的圆锥结构,上述平衡重锤的底面上安装有上述激光发射器,上述下球体的内底面上向上凸设有穿过伸入孔至中间空间内的安装柱,安装柱的外侧壁上一体成型有若干片竖立设置并间隔均匀环绕分布的限流板,各限流板呈长方形板体,各限流板呈发射状排列并伸入上述中间空间内,各限流板的一侧相靠紧并一体成型在一起,各限流板的另一侧对应伸入相邻的两限流片之间,各限流板构成所述的内限流结构,安装柱顶面中心与吊绳的一端相连,吊绳的另一端固定于上述垂准仪安装架,外球体球心与上述内球体球心重合,上述慢流动性填充液为机油,且上述慢流动性填充液的液面低于分隔板。
14、本发明一种电梯导轨巡检仪,应用时,两电梯导轨上均安装有导轨攀爬机器人,因导轨攀爬机器人通过连接装置与电梯轿厢的底部固定,使得导轨攀爬机器人会跟随电梯轿厢进行同步的升降,即电梯轿厢进行升降运动时,各上外车体、各下外车体、各上内车体和各下内车体均会沿电梯导轨进行升降。在电梯轿厢升降的过程中,若电梯导轨之间的间距发生变化,则伸缩扭转支架则能够左右伸缩调节间距,使得导轨攀爬机器人能够正常运行,并且导轨顶面间距检测装置的激光测距仪将激光发射至激光反射面上,可实时跟踪并检测出导轨顶面间距的偏差。而对于电梯导轨垂直度偏差,导轨攀爬机器人则是采用分段式的检测,即当电梯轿厢上升一定高度后停止,此时升降装置带动下内车体沿电梯导轨进行升降运动,因激光发射器始终对二维psd位置检测仪发射铅锤激光,在下内车体运行的过程中由二维psd位置检测仪反馈其上的激光光斑点的偏移量即可立即检测出电梯导轨的垂直度偏差,在电梯导轨不同高度处检测垂直度,最后再将检测的多段数据进行整合分析,这样的检测方式使得激光发射器与二维psd位置检测仪的距离不会出现过远的情况,以避免激光在传播的过程中逐渐发散,而导致检测数据不准确的情况,并且激光发射器安装于外球体的平衡重锤上,当上外车体与上内车体停止移动后,外球体摆动的幅度会先受到内球体与外球体配合间隙的限制,而外球体绕吊绳扭动的幅度又将受到外限流结构与内限流结构的限制,紧接着外球体的摆动与扭动的动能将由内限流结构传导给慢流动性填充液,并由慢流动性填充液的缓冲作用而消散掉,而外限流结构对慢流动性填充液起到安定作用,又可以提高慢流动性填充液缓冲作用的效果,从而确保激光发射器因导轨攀爬机器人的运行而产生晃动后,能迅速地安定下来,自动实现垂直校正,并垂直向下发射激光束,保证了电梯导轨巡检仪对电梯导轨垂直度检测的准确性与时效性。
本文地址:https://www.jishuxx.com/zhuanli/20240723/216321.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表