一种伸缩臂式高空作业车变幅机构铰点位置设计方法与流程
- 国知局
- 2024-08-01 04:54:23
本发明涉及高空作业车变幅机构,尤其涉及一种伸缩臂式高空作业车变幅机构铰点位置设计方法。
背景技术:
1、变幅机构是高空作业车最为关键的机构之一,他控制着整个作业臂作业角度,由于其在工作过程中要承载着整个作业臂的重力载荷以及工作载荷,所以它的安全性和稳定性决定了整车的安全性和稳定性。变幅机构主要由高空作业车第一节作业臂与转台通过销轴连接,然后由变幅液压缸分别与二者相连。变幅机构不仅要承担改变工作角度的作用,而且要承载着整个作业臂系统的全部重量,而他们的受力情况与作业臂上的三个铰点位置密切相关。现有的变幅机构的铰点位置设计主要依靠经验,后续进行试验验证,设计周期长,研发成本高,未形成相应的参数设计方法;且铰点位置的选择较为不合理,其三个铰点的位置往往根据生产经验选择,导致不能充分发挥结构的力学性能,从而影响了变幅机构在作业过程中的稳定性和使用寿命。
2、因此,亟需一种伸缩臂式高空作业车变幅机构铰点位置设计方法来解决上述问题。
技术实现思路
1、基于以上所述,本发明的目的在于提供一种伸缩臂式高空作业车变幅机构铰点位置设计方法,铰点位置选择较为合理,变幅机构在作业过程中的稳定性较高、使用寿命较长。
2、为达上述目的,本发明采用以下技术方案:
3、一种伸缩臂式高空作业车变幅机构铰点位置设计方法,包括以下步骤:
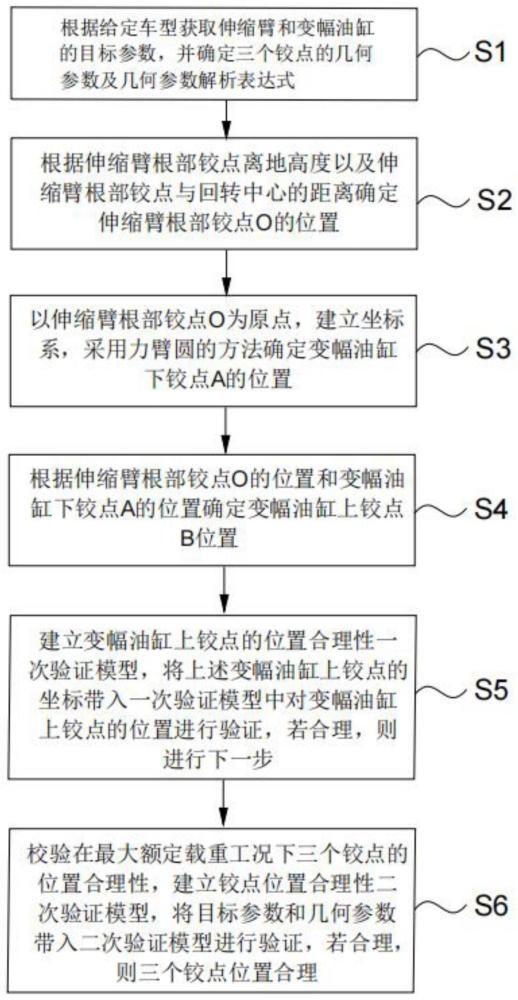
4、根据给定车型获取伸缩臂和变幅油缸的目标参数,并确定三个铰点的几何参数及几何参数解析表达式;
5、根据所述伸缩臂根部铰点离地高度h0以及所述伸缩臂根部铰点与回转中心的距离e确定所述伸缩臂根部铰点o的位置;
6、以所述伸缩臂根部铰点o为原点,建立坐标系,设所述变幅油缸下铰点a点坐标为(ax,ay),采用力臂圆的方法确定所述变幅油缸下铰点a的位置;
7、根据所述伸缩臂根部铰点o的位置和所述变幅油缸下铰点a的位置确定所述变幅油缸上铰点b位置;
8、建立所述变幅油缸上铰点的位置合理性一次验证模型,将所述变幅油缸上铰点的坐标带入所述一次验证模型中对所述变幅油缸上铰点的位置进行验证,若合理,则进行下一步;
9、校验在最大额定载重工况下所述三个铰点的位置合理性,建立铰点位置合理性二次验证模型,将所述目标参数和所述几何参数带入所述二次验证模型进行验证,若合理,则所述三个铰点位置合理。
10、作为一种伸缩臂式高空作业车变幅机构铰点位置设计方法的优选方案,确定三个铰点的几何参数及几何参数解析表达式包括:
11、根据所述目标参数确定所述伸缩臂的最大仰角α、所述伸缩臂的最小仰角β、所述变幅油缸全伸状态下的长度lmax和所述变幅油缸全缩状态下的长度lmin;
12、设所述伸缩臂根部铰点o与所述变幅油缸上铰点b之间的距离为l,所述伸缩臂根部铰点o与所述变幅油缸下铰点a之间的距离为b,定义所述变幅油缸的伸缩比:
13、
14、在所述变幅油缸处于全缩状态下,根据余弦定理有:
15、
16、在所述变幅油缸处于全伸状态下,根据余弦定理有:
17、
18、令
19、
20、将式(4)带入式(2)和式(3)得:
21、ρ2=σ2+1-2σcosα (5)
22、λ2ρ2=σ2+1-2σcos(α+β) (6)
23、式(5)带入式(6)得:
24、
25、令
26、
27、将式(8)式(7)得:
28、σ2-2cσ+1=0 (9)
29、铰点布置为前支式结构时得:
30、
31、由式(1)至式(10)确定所述伸缩臂的最大仰角α、所述伸缩臂的最小仰角β和所述变幅油缸的伸缩比λ为三个变量,根据所述三个变量确定所述三个铰点构成的三角形各边之间的比例关系。
32、作为一种伸缩臂式高空作业车变幅机构铰点位置设计方法的优选方案,确定三个铰点的几何参数及几何参数解析表达式还包括:
33、设所述伸缩臂仰角为θ时,所述变幅油缸对o点力臂为:
34、lθ=lsinγ (11)
35、所述伸缩臂仰角为θ时,所述变幅油缸上铰点位于b1处,在△oab1中,∠ob1a=γ,根据余弦定理有:
36、
37、根据正弦定理有:
38、
39、联立式(11)至式(13)得:
40、
41、将式(14)回带式(11)得:
42、
43、当lθ=a时,设此时所述伸缩臂仰角为θ0,有得:
44、
45、由式(11)至式(16)证明在所述伸缩臂仰角变化过程中,lθ,γ的取值由所述三个变量确定,根据所述三个变量确定所述变幅油缸的作用力随所述伸缩臂仰角的变化规律,式(1)至式(16)即为所述三个铰点的几何解析式。
46、作为一种伸缩臂式高空作业车变幅机构铰点位置设计方法的优选方案,确定所述伸缩臂根部铰点o的位置包括:
47、全缩状态下伸缩臂的长度为lmin,有:
48、lminsinβ=(h+h1)-h0 (17)
49、lmincosβ=e+r (18)
50、其中,β-伸缩臂最大仰角;h-伸缩臂全缩状态下,工作幅度为r时,最大举升高度;h1-工作台中心到臂头滑轮组中心的距离,一般取1.2-2m;r-工作幅度;e-回转中心到o点的距离;h0-伸缩臂根部铰点离地高度;
51、根据给定车型确定所述伸缩臂的长度,然后确定所述伸缩臂根部铰点离地高度h0,同时确定所述回转中心到o点的距离e。
52、作为一种伸缩臂式高空作业车变幅机构铰点位置设计方法的优选方案,采用力臂圆的方法确定所述变幅油缸下铰点a的位置包括:
53、所述变幅油缸的最大轴向力为:
54、
55、式中,f-变幅油缸轴向力;p-变幅油缸额定工作压力;d-变幅油缸缸径;n-变幅油缸缸数;
56、已知最大额定载重工况下,根据最大额定载重工况和所述伸缩臂重量,计算此时所述变幅油缸轴线到所述伸缩臂根部铰点o的力臂:
57、
58、式中,lomax-变幅油缸轴线到伸缩臂根部铰点o的力臂;gmax-最大额定载重;θomax-最大额定载重工况下,伸缩臂仰角;g1-伸缩臂重量;l1-伸缩臂重心到o点距离;
59、当所述伸缩臂处于水平位置,载重为空载时,根据工作台重量和所述伸缩臂重量,计算此时所述变幅油缸轴线到所述伸缩臂根部铰点o的力臂:
60、
61、式中,lo空-变幅油缸轴线到伸缩臂根部铰点o的力臂;g空-空载工况下,工作台重量;lmax-伸缩臂最大长度;
62、以所述伸缩臂根部铰点o为圆心,以l的长度为半径作轨迹圆,分别向下以所述伸缩臂最小仰角α、向上以最大额定载重工况下所述伸缩臂仰角θomax为圆心角,得到与所述轨迹圆的交点;
63、分别以lomax,lo空的长度为半径作力臂圆,通过所述两个交点分别作两个所述力臂圆的切线,两切线相交点即所述变幅油缸上铰点a的位置。
64、作为一种伸缩臂式高空作业车变幅机构铰点位置设计方法的优选方案,确定所述变幅油缸上铰点b的位置包括:
65、设所述变幅油缸上铰点b的坐标为(bx,by),其中,by根据所述伸缩臂的臂架截面确定;
66、根据勾股定理可知:
67、
68、由式(22)得到bx,即得到所述变幅油缸上铰点b的位置。
69、作为一种伸缩臂式高空作业车变幅机构铰点位置设计方法的优选方案,所述变幅油缸的行程一般需满足全伸长度与全缩长度比值不大于1.8,所述一次验证模型包括:
70、
71、其中,ab2为所述变幅油缸在全伸时的长度,ab为所述变幅油缸在全缩时的长度;
72、将得到的所述变幅油缸下铰点a的坐标和所述变幅油缸上铰点b的坐标带入式(23),若式(23)成立,则所述变幅油缸上铰点b位置合理。
73、作为一种伸缩臂式高空作业车变幅机构铰点位置设计方法的优选方案,所述二次验证模型包括:
74、
75、其中,p为变幅油缸在各工况下的工作压力;fg为变幅油缸在各工况下所受轴向力;d为变幅油缸缸径;n为变幅油缸缸数;
76、计算变幅油缸在各工况下工作压力p,若p值在预设的压力允许范围内,则所述三个铰点位置合理。
77、本发明的有益效果为:
78、本发明提供一种伸缩臂式高空作业车变幅机构铰点位置设计方法,通过三个铰点的几何参数和几何参数解析表达式确定三个铰点之间的位置关系和长度比例关系,然后确定三个铰点的具体位置,再通过一次验证模型验证变幅油缸上铰点的位置合理性,并通过二次验证模型验证三个铰点位置的合理性,使得设计的三个铰点的位置不仅符合几何参数上的关系,受力也较为合理,能有效提高变幅机构在作业过程中的稳定性和使用寿命。
本文地址:https://www.jishuxx.com/zhuanli/20240723/217267.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种集装箱的制作方法
下一篇
返回列表