一种远程缆道绞车智能控制系统的制作方法
- 国知局
- 2024-08-01 05:08:40
本技术涉及水文器与缆道绞车配合,具体涉及一种远程缆道绞车智能控制系统。
背景技术:
1、在现代水文检测工程中,水文器一般是通过缆道设备牵引流域对应区域,并在对应区域将水文器投放到水下,利用水文器在水域中对水域环境进行监测。目前的水文器集成了大量感知设备,使得水文器在进行长期工作后需要返回到岸边进行充电。
2、目前传统在基础留上,一般采用缆道装置用控制水文器进行移动,将水文器从水面提升到一定高度,再通过缆道装置将水文器移动到充电舱对应位置,随后在人工辅助的作用下将水文器放入到充电舱中进行充电。其整个流程操作复杂、效率低下以及人工操作风险较高。
3、虽然水文器与充电舱采用了磁吸的方式进行充电定位,可以降低人工操作的风险,但是尝试将水文器利用缆道装置进行自动复位时,其效果并不理想,分析其原型在于,水文器与缆绳进行转送过程中,容易受到流域自然环境影响,例如大风天气下,出现的水文器晃动,从而导致水文器自动放置到充电舱的过程中,偶尔出现碰撞现象,基于此,如何在现有缆道装置基础上,更加更加稳定的将水文器自动放入充电舱是值得研究的。
技术实现思路
1、本实用新型的目的在于提供一种远程缆道绞车智能控制系统,以期望改善水文器与缆绳进行转送过程中,容易受到流域自然环境影响,例如大风天气下,出现的水文器晃动,从而导致水文器自动放置到充电舱的过程中,容易出现碰撞现象的问题。
2、为解决上述的技术问题,本实用新型采用以下技术方案:
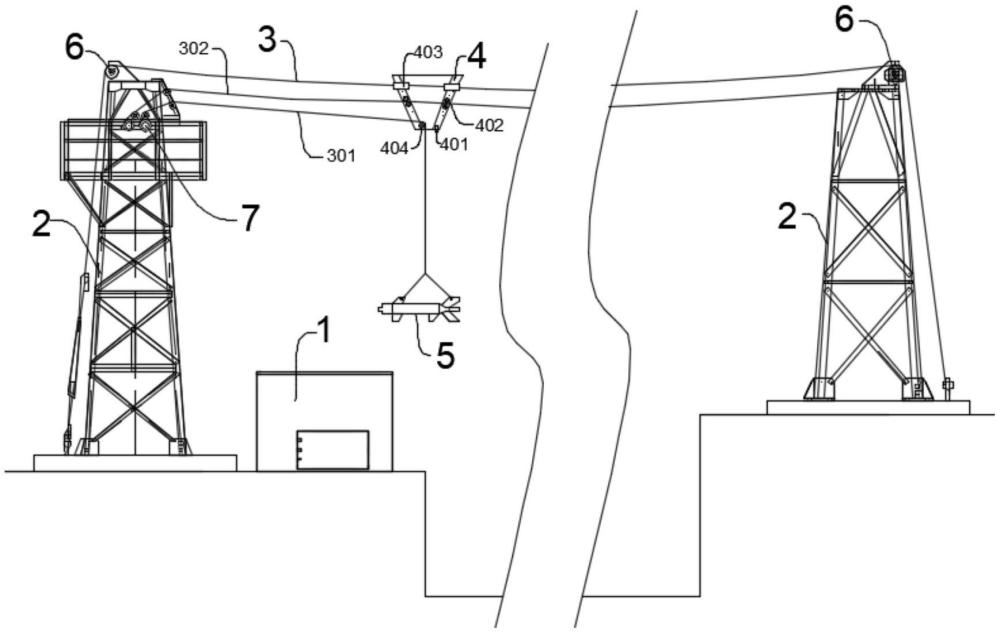
3、一种远程缆道绞车智能控制系统,包括充电舱和两个以上的立柱塔,且相邻的两个立柱塔之间设有主索,上述主索上设置行车装置,主索上设有磁性标记,上述立柱塔上设有与主索对应的位置传感器,位置传感器通过识别磁性标记获取主索与立柱塔的相对位置,通过位置传感器采集磁性标记信号并将信号传递至上位机;从而便于上位机相对位置;上述行车装置和立柱塔之间设有第一工作索,由第一工作索将水文器悬挂在行车装置下方,上述行车装置下端设有激光测距仪,上述激光测距仪用于采集水文器与行车装置之间的间距信号并将信号传递至上位机;上述上位机与主索的牵引设备的控制单元信号连接,由上位机传递控制信号至牵引设备的控制单元,由牵引设备的控制单元控制牵引设备带动主索和行车装置移动;充电舱上端设有电动门,电动门一侧设有红外传感器,红外传感器用于采集物体经过信号并将信号传递至电动门控制单元。
4、作为优选,上述立柱塔之间设有副索,上述行车装置上设有两个以上的稳定导轮组,上述稳定导轮组为两个相对设置的导轮,上述稳定导轮组用于在副索上滑动。
5、作为优选,上述主索的牵引设备为卷扬机,上述卷扬机固定在立柱塔的顶端,上述主索两端分别缠绕在卷扬机上,由卷扬机调整主索张紧程度,上述主索末端固定在立柱塔底部。
6、进一步的技术方案是,上述行车装置上设有抱锁,上述抱锁用于将行车装置上端固定在主索上,上述行车装置随着主索移动。
7、更进一步的技术方案是,上述抱锁为两个以上,上述抱锁用于限制行车装置与主索处于相对平行状态。
8、作为优选,上述行车装置下端设有牵引轮,上述立柱塔上设有与牵引轮对应的拉力轮组,第一工作索套设在牵引轮和拉力轮组上,且第一工作索末端连接牵引轮下方的水文器。
9、作为优选,上述电动门上设有开关门传感器,上述开关门传感器与上位机信号连接,上述开关门传感器用于在工作时向上位机发送开关门信号,上述上位机接收开关门信号与激光测距仪的信号进行位置校对。
10、进一步的技术方案是,上述电动门上设有导槽,上述充电舱上端设有与导槽对应的凸起,上述开关门传感器置于导槽端部,由开关门传感器用于触碰凸起时发出触发信号至上位机。
11、作为优选,上述立柱塔下端设有地基座,上述地基座中设有钢筋笼,上述地基座上设有地桩,上述地桩用于插入大地,上述地桩与钢筋笼焊接。
12、上述地基座上设有锁扣,上述锁扣下端连接钢筋笼,上述锁扣上端从地基座上方伸出,上述主索端部用于连接锁扣。
13、与现有技术相比,本实用新型的有益效果至少是如下之一:
14、本实用新型通过行车装置随主索移动,利用立柱塔上的位置传感器捕捉到磁性标记的信号,通过对磁性标记进行计数并将相关的位置信息实时传送到上位机。上位机可以预判行车装置随主索移动时的行进位置;通过行车装置作为支点,利用第一工作索对水文器进行投放,水文器能相对过行车装置进行提升或降低,同时行车装置下端的激光测距仪可以采集水文器与行车装置之间的间距信息并信号发送至上位机,从而可以确认水文器的相对高度;在相对高度确定的情况下,还可以利用上位机信号连接到牵引设备的控制单元,上位机向牵引设备的控制单元发送指令,控制牵引设备驱动主索和行车装置的移动,使水文器置于充电舱对应位置,充电舱上端安装有电动门,旁边配备有红外传感器用于检测物体经过的信号。当物体通过时,红外传感器就会采集信号,并将信息传递至电动门的控制单元,从而控制电动门的开闭,在自动化过程中提高了操作精确性和效率,还降低了操作成本和安全隐患。
15、本实用新型在主索限位的情况下,还通过副索配合稳定导轮组,从而行车装置上获得更多的支点,一方面有利于降低行车装置出现非必要晃动,另一方面在主索与行车装置同步移动过程中,将副索绷直,从而可以作为引导线路进行辅助。
16、本实用新型还通过卷扬机可以调整主索的张紧状态,当流域存在较大波动时,为了降低水文器对主索的拉扯强度,可以通过调整主索的张弛程度,使得主索具有更大的张弛度,有利于保障主索在特殊天气下的安全性。
技术特征:1.一种远程缆道绞车智能控制系统,包括充电舱(1)和两个以上的立柱塔(2),且相邻的两个立柱塔(2)之间设有主索(3),所述主索(3)上设置行车装置(4),其特征在于:主索(3)上设有磁性标记,所述立柱塔(2)上设有与主索(3)对应的位置传感器,由位置传感器采集磁性标记信号并将信号传递至上位机;
2.根据权利要求1所述的远程缆道绞车智能控制系统,其特征在于:所述立柱塔(2)之间设有副索(302),所述行车装置(4)上设有两个以上的稳定导轮组(402),所述稳定导轮组(402)为两个相对设置的导轮,所述稳定导轮组(402)用于在副索(302)上滑动。
3.根据权利要求1所述的远程缆道绞车智能控制系统,其特征在于:所述主索(3)的牵引设备为卷扬机(6),所述卷扬机(6)固定在立柱塔(2)的顶端,所述主索(3)两端分别缠绕在卷扬机(6)上,由卷扬机(6)调整主索(3)张紧程度,所述主索(3)末端固定在立柱塔(2)底部。
4.根据权利要求3所述的远程缆道绞车智能控制系统,其特征在于:所述行车装置(4)上设有抱锁(403),所述抱锁(403)用于将行车装置(4)上端固定在主索(3)上,所述行车装置(4)随着主索(3)移动。
5.根据权利要求4所述的远程缆道绞车智能控制系统,其特征在于:所述抱锁(403)为两个以上,所述抱锁(403)用于限制行车装置(4)与主索(3)处于相对平行状态。
6.根据权利要求1所述的远程缆道绞车智能控制系统,其特征在于:所述行车装置(4)下端设有牵引轮(404),所述立柱塔(2)上设有与牵引轮(404)对应的拉力轮组(7),第一工作索(301)套设在牵引轮(404)和拉力轮组(7)上,且第一工作索(301)末端连接牵引轮(404)下方的水文器(5)。
7.根据权利要求1所述的远程缆道绞车智能控制系统,其特征在于:所述电动门(101)上设有开关门传感器,所述开关门传感器与上位机信号连接,所述开关门传感器用于在工作时向上位机发送开关门信号,所述上位机接收开关门信号与激光测距仪(401)的信号进行位置校对。
8.根据权利要求7所述的远程缆道绞车智能控制系统,其特征在于:所述电动门(101)上设有导槽(102),所述充电舱(1)上端设有与导槽(102)对应的凸起(103),所述开关门传感器置于导槽(102)端部,由开关门传感器用于触碰凸起时发出触发信号至上位机。
9.根据权利要求1所述的远程缆道绞车智能控制系统,其特征在于:所述立柱塔(2)下端设有地基座(8),所述地基座(8)中设有钢筋笼(801),所述地基座(8)上设有地桩(802),所述地桩(802)用于插入大地,所述地桩(802)与钢筋笼(801)焊接。
10.根据权利要求9所述的远程缆道绞车智能控制系统,其特征在于:所述地基座(8)上设有锁扣(803),所述锁扣(803)下端连接钢筋笼(801),所述锁扣(803)上端从地基座(8)上方伸出,所述主索(3)端部用于连接锁扣(803)。
技术总结本技术公开了一种远程缆道绞车智能控制系统,相邻的两个立柱塔之间设有主索,主索上设置行车装置,主索上设有磁性标记,立柱塔上设有与主索对应的位置传感器,通过位置传感器采集磁性标记信号并将信号传递至上位机;行车装置和立柱塔之间设有第一工作索,行车装置下端设有激光测距仪,述激光测距仪用于采集水文器与行车装置之间的间距信号并将信号传递至上位机;以期望改善水文器与缆绳进行转送过程中,容易受到流域自然环境影响,例如大风天气下,出现的水文器晃动,从而导致水文器自动放置到充电舱的过程中,容易出现碰撞现象的问题。技术研发人员:李雨,毕宏伟,杨运,陈金凤,杜昌清,刘陈飞,蒋正清,高旗远,郝博耕,宋雄受保护的技术使用者:天宇利水信息技术成都有限公司技术研发日:20231221技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/218512.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种防误触装置的制作方法
下一篇
返回列表