一种燃煤发电机组炉膛负压全程自动控制方法及系统与流程
- 国知局
- 2024-08-01 02:10:39
本发明属于自动控制及智能控制领域,具体地说是一种配置汽动引风机的燃煤发电机组炉膛负压全程自动控制方法及系统。
背景技术:
1、国内燃煤发电机组引风机常规设计采用电机驱动,一般分为动叶可调和静叶可调两类,用于炉膛压力控制,使得炉膛维持一定的负压。随着发电机组容量的增加,为了降低厂用电率、节约原煤、提高节能效益,燃煤机组在基建或改造时将引风机与增压风机进行合并优化,由电动机驱动改为小汽轮机驱动,进而引风机闭环控制策略发生变化,炉膛负压由引风机静叶与小汽轮机转速协同控制。在机组运行阶段,配置汽动引风机的燃煤发电机组机组存在炉膛负压控制方式转换的应用场景,锅炉风量或负荷低时,炉膛负压由引风机静叶控制,随着锅炉风量或负荷的升高,引风机静叶开度到安全上限时,炉膛负压由小汽轮机转速控制,随着特高压主干网架和新能源的规模化并网,火力发电机组宽负荷运行的幅度越来越高,高、低负荷频繁变化成为机组运行常态,进而导致机组在运行阶段炉膛负压控制方式切换的次数也逐渐增加。
2、目前,国内配置汽动引风机的燃煤机组炉膛负压控制方式的切换大多采用运行人员手动操作的控制策略,在引风机静叶自动调节炉膛负压过程中,小汽轮机转速控制切手动,转速控制自动调节炉膛负压时,引风机静叶控制切手动,控制回路手、自动切换的时间点由运行人员判断,手动进行切换,易造成炉膛负压控制方式切换点不易掌握,使得调节品质得不到有效保证,炉膛负压波动具有一定的危险性,同时手动切换也大大加重了运行人员的操作负担。
3、作为火力发电机组智能化发展的重要方向,机组自启停控制系统(automaticpower plant start-up and shut-down system,aps)经过多年的发展与实践,其设计理念及操作模式逐渐被发电行业认可,并逐步应用在大型电厂的控制系统中,而炉膛负压控制作为aps风烟系统全程控制的重要功能,配置汽动引风机的大型电厂对炉膛负压全程自动控制的需求越来越迫切。
技术实现思路
1、本发明所要解决的技术问题是克服上述现有技术存在的不足,提出一种配置汽动引风机的燃煤发电机组炉膛负压全程自动控制方法及系统,以达到配置汽动引风机的燃煤机组在宽负荷升降负荷过程中引风机静叶和引风机小汽轮机转速的全程闭环控制的目的,控制模式无需运行人员手动干预,实现炉膛负压的全程自动控制。
2、为此,本发明采用的一种技术方案为:一种燃煤发电机组炉膛负压全程自动控制方法,其包括以下步骤:
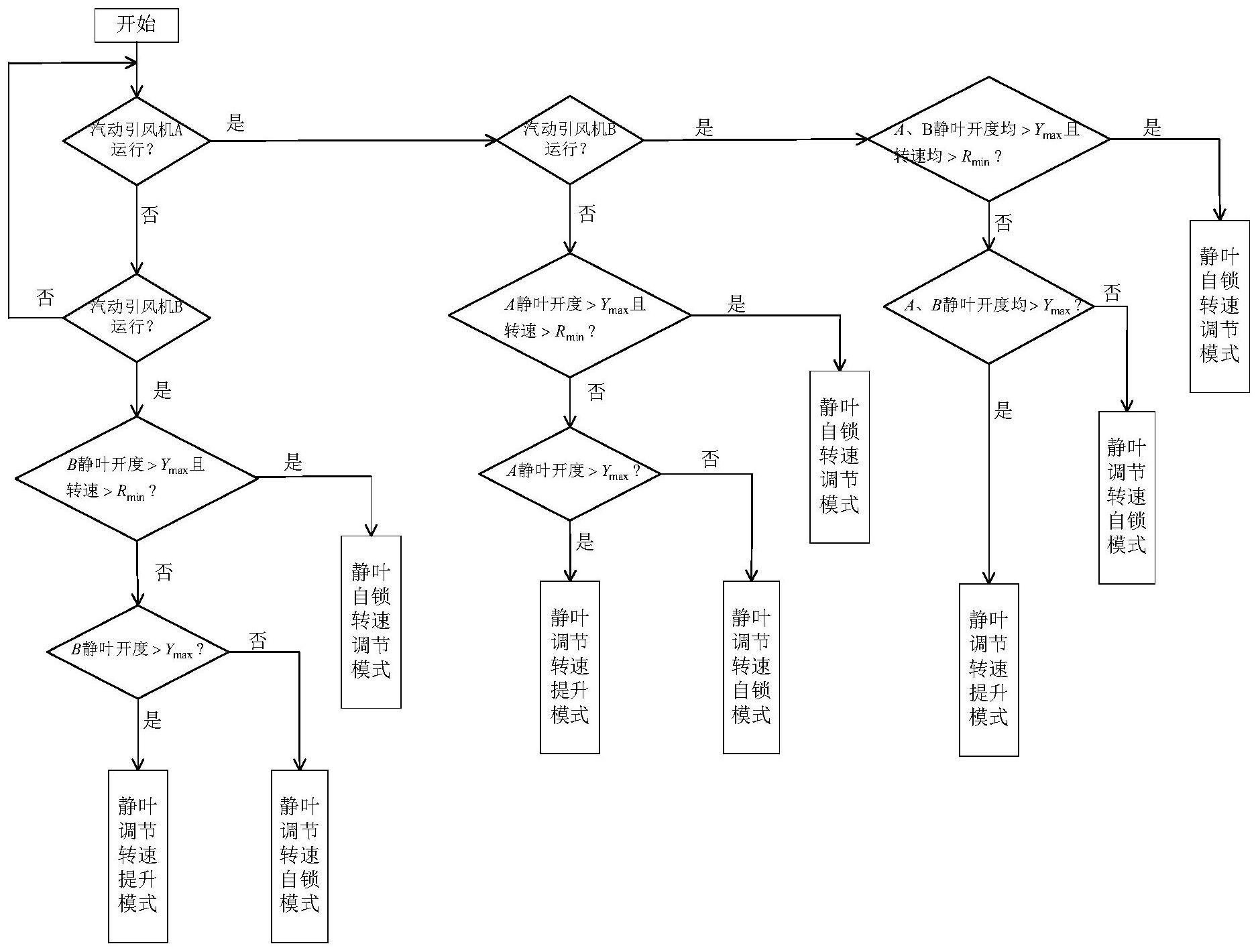
3、步骤a),判断汽动引风机a是否运行,若是,进行步骤a1)操作,若否,进行步骤a2)操作;
4、步骤a1),判断汽动引风机b是否运行,若是,进行步骤a11)操作,若否,进行步骤a12)操作;
5、步骤a11),表征两台汽动引风机都已投入运行,对两台汽动引风机的静叶与小汽轮机转速综合判断,判断引风机a、b静叶开度均>ymax且小汽轮机转速均>rmin是否满足,若满足,炉膛负压控制进入静叶自锁转速调节模式,若不满足,进一步判断引风机a、b静叶开度均>ymax是否满足,若满足,炉膛负压控制进入静叶调节转速提升模式,若不满足,炉膛负压控制进入静叶调节转速自锁模式;
6、步骤a12),表征只有汽动引风机a投入运行,对汽动引风机a的静叶与小汽轮机转速综合判断,判断引风机a静叶开度>ymax且小汽轮机转速>rmin是否满足,若满足,炉膛负压控制进入静叶自锁转速调节模式,若不满足,进一步判断引风机a静叶开度>ymax是否满足,若满足,炉膛负压控制进入静叶调节转速提升模式,若不满足,炉膛负压控制进入静叶调节转速自锁模式;
7、步骤a2),判断汽动引风机b是否运行,若是,进行步骤a21)操作,若否,进行步骤a22)操作;
8、步骤a21),表征只有汽动引风机b投入运行,对汽动引风机b的静叶与小汽轮机转速综合判断,判断引风机b静叶开度>ymax且小汽轮机转速>rmin是否满足,若满足,炉膛负压控制进入静叶自锁转速调节模式,若不满足,进一步判断引风机b静叶开度>ymax是否满足,若满足,炉膛负压控制进入静叶调节转速提升模式,若不满足,炉膛负压控制进入静叶调节转速自锁模式;
9、步骤a22),表征两台汽动引风机均未投入运行,此时在步骤a)等待;
10、所述的ymax为:汽动引风机静叶的最大安全开度,由引风机最大出力试验得出;所述的rmin为:汽动引风机小汽轮机转速投入遥控时的最小转速。
11、本发明的炉膛负压全程自动控制是通过机组当前风烟系统设备运行的状态和相关参数自动判断出适合与机组当前工况炉膛负压的控制模式,引风机静叶与引风机小汽轮机转速投入自动时,相应的控制模式随即自动投入,随着机组宽负荷运行,炉膛负压控制模式自动切换。整个控制过程按机组的不同运行工况共设计了3个模式,静叶调节转速自锁模式、静叶自锁转速调节模式和静叶调节转速提升模式。
12、进一步地,所述的静叶调节转速自锁模式为:引风机静叶处于自动调节方式,引风机小汽轮机转速处于自锁方式,引风机静叶pid调节器根据炉膛负压偏差自动生成引风机静叶指令,引风机转速pid调节器处于跟踪状态,维持当前引风机小汽轮机转速指令。
13、进一步地,所述的静叶调节转速提升模式为:引风机静叶处于自动调节方式,引风机小汽轮机转速处于转速提升方式,引风机静叶pid调节器处于闭锁增状态,根据炉膛负压偏差自动生成引风机静叶指令,静叶指令往小自动调节,往大闭锁,同时,引风机转速pid调节器处于闭锁减状态,根据炉膛负压偏差自动生成引风机小汽轮机转速指令,转速指令往大自动提升,往小闭锁,当引风机静叶往小调节时,引风机小汽轮机转速自锁,引风机转速pid调节器处于跟踪状态,维持当前小汽轮机转速指令,当引风机小汽轮机转速往大调节时,引风机静叶自锁,引风机静叶pid调节器处于跟踪状态,维持当前静叶指令。
14、进一步地,所述的静叶自锁转速调节模式为:引风机静叶处于自锁方式,引风机小汽轮机转速处于自动调节方式,引风机静叶pid调节器处于跟踪状态,维持当前引风机静叶指令,引风机转速pid调节器根据炉膛负压偏差自动生成引风机小汽轮机转速指令。
15、本发明采用的另一种技术方案为:一种燃煤发电机组炉膛负压全程自动控制系统,其包括:
16、第一判断单元,判断汽动引风机a是否运行,若是,进行第二判断单元操作,若否,进行第三判断单元操作;
17、第二判断单元,判断汽动引风机b是否运行,若是,进行第四判断单元操作,若否,进行第五判断单元操作;
18、第四判断单元,表征两台汽动引风机都已投入运行,对两台汽动引风机的静叶与小汽轮机转速综合判断,判断引风机a、b静叶开度均>ymax且小汽轮机转速均>rmin是否满足,若满足,炉膛负压控制进入静叶自锁转速调节模式,若不满足,进一步判断引风机a、b静叶开度均>ymax是否满足,若满足,炉膛负压控制进入静叶调节转速提升模式,若不满足,炉膛负压控制进入静叶调节转速自锁模式;
19、第五判断单元,表征只有汽动引风机a投入运行,对汽动引风机a的静叶与小汽轮机转速综合判断,判断引风机a静叶开度>ymax且小汽轮机转速>rmin是否满足,若满足,炉膛负压控制进入静叶自锁转速调节模式,若不满足,进一步判断引风机a静叶开度>ymax是否满足,若满足,炉膛负压控制进入静叶调节转速提升模式,若不满足,炉膛负压控制进入静叶调节转速自锁模式;
20、第三判断单元,判断汽动引风机b是否运行,若是,进行第六判断单元操作,若否,进行第七判断单元操作;
21、第六判断单元,表征只有汽动引风机b投入运行,对汽动引风机b的静叶与小汽轮机转速综合判断,判断引风机b静叶开度>ymax且小汽轮机转速>rmin是否满足,若满足,炉膛负压控制进入静叶自锁转速调节模式,若不满足,进一步判断引风机b静叶开度>ymax是否满足,若满足,炉膛负压控制进入静叶调节转速提升模式,若不满足,炉膛负压控制进入静叶调节转速自锁模式;
22、第七判断单元,表征两台汽动引风机均未投入运行,此时在第一判断单元等待;
23、所述的ymax为:汽动引风机静叶的最大安全开度,由引风机最大出力试验得出;所述的rmin为:汽动引风机小汽轮机转速投入遥控时的最小转速。
24、和现有技术相比,本发明具有的有益效果如下:本发明针对配置汽动引风机的燃煤发电机组实现了炉膛负压全程自动控制,在机组宽负荷升降负荷时,根据机组风烟系统运行设备和运行参数,自动进行引风机静叶和引风机小汽轮机转速控制方式切换,3种控制模式无扰自动过渡,全程无需运行人员手动操作,减轻运行人员的工作强度,减少运行人员误操作的机率,同时提高机组的自动化水平,保障机组风烟系统控制在各工况下的安全稳定运行。
本文地址:https://www.jishuxx.com/zhuanli/20240724/207862.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表