一种发电锅炉主蒸汽温度自动控制方法与流程
- 国知局
- 2024-08-01 02:23:06
本发明属于发电锅炉自动控制,具体涉及一种基于人工鱼群算法优化smith-pid的发电锅炉主蒸汽温度自动控制方法。
背景技术:
1、锅炉主蒸汽温度是锅炉控制的主要参数之一,其控制效果的好坏直接关系到蒸汽的品质,影响机组经济运行。锅炉主蒸汽温度为复杂的受控对象,而且有较大的滞后情况,燃烧变化、烟气变化、手动干预的减温水量变化、外部主蒸汽负荷的变化、一/二次风的变化均会使主蒸汽温度受到影响。针对上述因素,主蒸汽温度的控制既要求对外界有较快的响应速度以及回稳率,又要求对减温压力变化有较强的抑制力,使系统具有良好的稳定性,保证高品质的蒸汽。而对于目前常规dcs软件算法均为模块架构,控制回路搭接主要是传统的pid控制,或者为串级pid控制,并引入负荷、燃料量等信号的前馈。虽然如此,但对于大滞后的主蒸汽温度控制来说,实际运行的动态效果仍然偏差大、过渡时间长、动态摆动,无法满足高精度控制要求。
2、而对于模糊控制、神经网络控制、滑模控制、无辨识预估控制等智能控制方法,虽然在主蒸汽温度控制研究中实现了较好的效果,但由于其运算的复杂以及dcs平台的制约而无法在dcs中实现,由外挂apc控制的计算机实现,会增加很大的投入费用。传统的发电锅炉主蒸汽温度控制选用pid控制(比例、积分、微分控制),将偏差的比例(p)、积分(i)、和微分(d)通过线性组合构成控制量,故称pid控制器。传统的pid控制对于明确系统能获得较好的控制效果,但对于难以用数学精确描述的系统,控制效果不好。对于被控对象的变化不能自动调整参数提供更好的控制。但随着科技的进步,人们遇到了许多传统pid控制系统不能做得很好甚至无法应用的领域,其中,对于发电锅炉工艺中由于各环节机械动作以及发电锅炉自身所引起的滞后环节无法进行较好的调节,且pid控制精度较差,调节时间较长。
技术实现思路
1、针对上述工业发电锅炉主蒸汽温度控制有很多不确定因素,导致系统呈现非线性并且发电锅炉主蒸汽温度控制有大滞后的缺点,本发明提供一种基于人工鱼群算法优化smith-pid的发电锅炉主蒸汽温度控制方法,用人工鱼群算法优化smith预估补偿pid控制的方法提高控制速率,以解决对温度精确控制的技术难题。
2、本发明的技术方案:
3、一种发电锅炉主蒸汽温度自动控制方法,包括以下几个步骤:
4、步骤1:建立有关发电锅炉主蒸汽控制通道的惰性区以及导前区的相关数学模型,具体步骤是:
5、通过采集发电锅炉主蒸汽的阶跃响应数据,利用最小二乘法进行数据拟合,得到发电锅炉主蒸汽控制通道惰性区以及导前区模型
6、
7、
8、其中,θ2(s)表示经过过热器的主蒸汽温度,θ1(s)表示减温器出口的蒸汽温度,v(s)表示减温水的流量。利用临界比例度法算出初始的pid参数kp0、ki0、kd0。
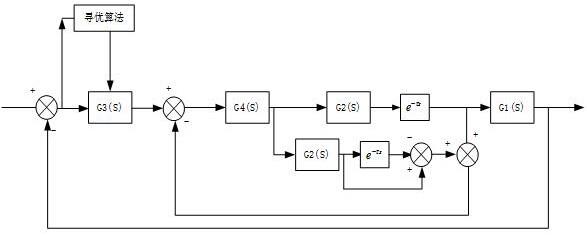
9、步骤2:通过在并联反馈环节引入一个预估补偿控制器,然后用常数分离的方法把滞后部分分离出作为单独的一项,按常规方法设计控制器g4(s)。一般g4(s)为pid控制的传递函数。其等效的传递函数为:
10、
11、其中g5(s)为smith补偿函数,由上式,需要
12、g5(s)=g2(s)(1-e-τs)
13、补偿后的系统传递函数为
14、
15、经过smith预估补偿,滞后部分被分离出去作为单独的一项并且对系统带来的不稳定影响将明显减弱。
16、步骤3:利用人工鱼群算法对pid参数进行寻优,并将最优解代入到原始参数,并运行。具体步骤如下:
17、步骤3.1:参数初始化。对人工鱼群规模n、鱼群拥挤度δ、人工鱼可搜索到的视野范围visual、移动步长step、迭代次数try_number等参数进行设置;
18、假设在某水域范围内存在n条人工鱼,每条人工鱼的状态用向量x=(x1,x2,x3,...,xn)表示,其中xi=(i=1,2,3,...,n),xj=(j=1,2,3,...,n)表示x的解向量;每条人工鱼所对应的食物浓度用y=f(x)表示,其中,y表示目标函数;相邻两条人工鱼之间的距离用dij=|xi-xj|表示;该水域范围内鱼群密度或拥挤度用δ表示;人工鱼可搜索到的视野范围用visual表示;每次移动的步长用step表示;觅食中的试探次数或迭代次数用try_number表示。
19、步骤3.2:计算每条人工鱼的食物浓度y,即依据目标函数计算适应度值。通过适应度值的比较,选择最佳状态值,并将其记录在公告板上;
20、假设人工鱼的当前位置为xi,在其感知的水域范围内随机选择一个游动位置xj,那么人工鱼游动的数学模型可表示为:
21、xj(k)=xi(k)+visual·rand()
22、式中:rand()——随机函数,且0<rand()<1。
23、同时假设位置xi处食物浓度为yi,xj处食物浓度为yj。如果食物浓度yj大于yi,那么人工鱼将会从位置xi向位置xj移动一步,步长step。同时,人工鱼下一次搜索的当前值可表示为:
24、
25、反之,如果食物浓度yj小于yi,那么人工鱼将会在其视野范围内重新寻找新的位置xj,然后对比两个位置的食物浓度。如果觅食中,迭代次数try_number达到最大值仍没有找到比当前食物浓度更高的位置,那么人工鱼将在其视野范围内随机的移动一个步长step,其数学表达式为:
26、xi(k+1)=xi(k)+rand()×step
27、步骤3.3:执行聚集和追尾行为,其中,觅食行为作缺省行为。根据步骤(2)计算的适应度值选择最优的行为去寻找食物;
28、假设人工鱼目前的位置为xi,在其可视范围内的鱼群数量用nf表示,位置xi处的食物浓度为yi,那么鱼群中心位置xc处的数学表达式为:
29、
30、假设鱼群中心位置xc处的食物浓度为yc,那么人工鱼是否向鱼群中心移动可由下式判断。
31、
32、如果上式成立,说明鱼群中心位置食物充足且鱼群不拥挤,那么人工鱼将向鱼群中心移动,形成聚群行为,其数学表达式为:
33、
34、相反,那么人工鱼将执行步骤(2)。
35、假设人工鱼的当前位置为xi,在其视野感知范围内,能够搜索到的食物浓度最高值(ymax)所对应的位置为xmax,那么人工鱼是否会向位置xmax处移动可由下式判断。
36、
37、若上式成立,说明位置xmax处的食物充足且鱼群不拥挤,那么人工鱼将向位置xmax移动,其数学表达式为:
38、
39、反之,那么人工鱼将执行步骤(2)。
40、本发明的有益效果:本发明基于人工鱼群算法优化smith-pid的发电锅炉主蒸汽温度控制方法,通过smith预估补偿控制能够有效地消除系统模型中的滞后影响,缩短系统调节时间,再利用人工鱼群算法对控制器参数进行寻优,能够大幅度的提高控制器的精度,并且有效地缩短了系统达到目标值的时间,降低了系统的超调量,并且减小了外部干扰的影响。
本文地址:https://www.jishuxx.com/zhuanli/20240724/208521.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表