一种基于视觉检测的装配到位用智能化检测设备的制作方法
- 国知局
- 2024-07-29 10:52:50
本发明涉及装配检测,具体为一种基于视觉检测的装配到位用智能化检测设备。
背景技术:
1、装配指将若干个零件合成部件或将若干个零件和部件结合成产品,装配时需要确定零件的位置是否正确,现有的装配用的检测设备缺少回收组件,难以实现自动化将装配残次品进行回收,影响生产的效率。
2、现有的装配到位用智能化检测设备存在的缺陷是:
3、1、专利文件cn110013961b,公开了一种产品规格智能化检测设备,主要考虑如何节省设置输送待搬送物的路径的面积与成本,而没有考虑对残次品进行回收处理,严重影响了装配的工作效率;
4、2、现有的装配用检测设备,缺乏对装配工件的质量问题进行检测,难以保证工件的质量;
5、3、专利文件cn111735829b,公开了一种自动智能化检测设备,主要考虑如何提高金属板质量检测的质量和数量,而没有考虑对装配后的工件进行表面清理,难以保证质量检测的准确度;
6、4、现有的装配用检测设备,没有考虑到如何检测装配后工件表面是否有污染物,影响整个检测的效率。
技术实现思路
1、本发明的目的在于提供一种基于视觉检测的装配到位用智能化检测设备,以解决上述背景技术中提出的问题。
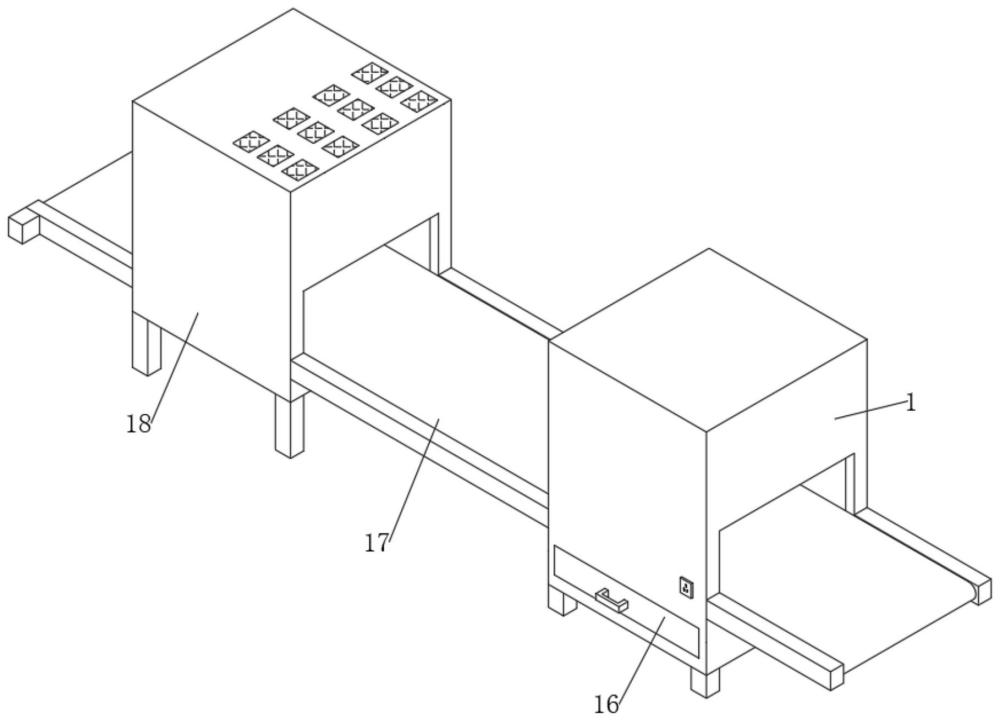
2、为实现上述目的,本发明提供如下技术方案:一种基于视觉检测的装配到位用智能化检测设备,包括传送带,所述传送带的外部安装有检测箱,所述检测箱的底壁安装有回收盒,且回收盒位于传送带的下方,所述检测箱的顶壁安装有回收组件,所述回收组件包括安装在检测箱顶壁的限位框一,所述限位框一的内部安装有伺服电机一和引导杆一,且引导杆一位于伺服电机一的下方,所述伺服电机一的输出端安装有丝杆一,所述丝杆一和引导杆一的外表面套接有衔接件一,所述衔接件一的底部安装有电动伸缩杆一,所述电动伸缩杆一的输出端安装有抓夹,所述抓夹的内部安装有微型电机和引导杆二,且,引导杆二位于微型电机的上方,所述微型电机的输出端安装有双向丝杆,所述双向丝杆和引导杆二的外表面套接有两组夹头,且夹头位于传送带的上方。
3、优选的,所述检测箱的顶壁安装有激光扫描仪和高分辨率摄像头,且高分辨率摄像头位于激光扫描仪与限位框一之间,所述检测箱的顶壁安装有两组照明灯,且两组照明灯位于高分辨率摄像头两侧。
4、优选的,所述传送带的外部安装有清理箱,且清理箱位于检测箱的后方,所述清理箱的两侧内壁均安装有电动伸缩杆三,所述电动伸缩杆三的输出端安装有雾化喷头。
5、优选的,所述清理箱的后壁安装有储液箱,所述储液箱的底部安装有输液管,且输液管的一端与雾化喷头相连接,所述清理箱的背面安装有进液管,且进液管用于向储液箱添加清洗液。
6、优选的,所述清理箱的顶壁安装有限位框二,所述限位框二的内部安装有伺服电机二和引导杆三,且引导杆三位于伺服电机二的下方,所述伺服电机二的输出端安装有丝杆二,所述丝杆二和引导杆三的外表面套接有衔接件二,所述衔接件二的底部安装有电动伸缩杆二,且电动伸缩杆二位于储液箱的前方,所述电动伸缩杆二的输出端安装有毛刷,且毛刷位于传送带的上方。
7、优选的,所述清理箱的顶壁均匀布置有烘干扇,且烘干扇位于限位框二的前方。
8、优选的,所述清理箱的背面安装有监控摄像头,其监控摄像头位于进液管的一侧。
9、优选的,该智能化检测设备的使用方法如下:
10、s1、将装配好的工件放置在传送带上,在传送带的带动下向清理箱移动,首先监控摄像头对工件进行捕捉,利用图像分析技术检测工件表面是否有粉尘、油污及其他污染物;
11、s2、一旦检测到工件表面存在粉尘、油污及其他污染物,首先启动雾化喷头,将雾化后的清洗液喷涂到工件表面,在传送带的带动下到达毛刷下方,利用毛刷对工件进行来回摩擦,以去除工件表面的粉尘、油污及其他污染物,再利用烘干扇将工件表面的清洗液吹干;
12、s3、清理好后,在传送带的带动下将工件移至检测箱中,激光扫描仪对工件进行激光扫描,精确测量工件的尺寸、形状和位置,且高分辨率摄像头对工件进行捕捉,并利用图像处理技术检查装配工件的质量;
13、s4、一旦检测到装配工件的质量存在问题,启动夹头将工件抓取,并将工件移至传送带边缘,让工件掉落至回收盒中,并定期对回收盒进行清理,避免回收盒装满,影响生产效率。
14、优选的,在所述步骤s2中,还包括如下步骤:
15、s21、先电动伸缩杆二伸长,带动毛刷下移,使毛刷与工件相接触,然后运行伺服电机二,带动丝杆二转动,进而带动电动伸缩杆二和毛刷沿着引导杆三的方向来回移动。
16、优选的,在所述步骤s4中,还包括如下步骤:
17、s41、启动伺服电机一,带动丝杆一转动,进而使得衔接件一、电动伸缩杆一和抓夹沿着引导杆一移动,同时伸长电动伸缩杆一,使得夹头下移,当夹头下移至工件附近时,运行微型电机,带动双向丝杆转动,使得两组夹头向工件靠近,并将工件夹紧。
18、与现有技术相比,本发明的有益效果是:
19、1、本发明通过安装有回收组件,一旦检测出装配后的工件存在装配质量问题,回收组件将会启动,将残次品回收到回收盒中,以便于集中处理,大大提高了装配的工作效率,启动伺服电机一,进而带动丝杆一转动,使得衔接件一、电动伸缩杆一和抓夹沿着引导杆一的方向移动,同时伸长电动伸缩杆一,使夹头下移,以靠近工件,然后运行微型电机,带动双向丝杆转动,进而使得两组夹头沿着引导杆二的方向向工件靠近,将工件夹持在两组夹头之间,由于传送带的宽度窄于回收盒,控制夹头和工件移至传送带的边缘,使工件可以自由落至回收盒中,定期对回收盒进行清理即可,减少了人工成本。
20、2、本发明通过安装有激光扫描仪、高分辨率摄像头和照明灯,清理后的工件在传送带的带动下向检测箱移动,激光扫描仪发射出激光,当激光碰到工件后反射回来,激光扫描仪接收反射回的激光,根据激光往返时间测量工件的尺寸、形状和位置,然后高分辨率摄像头实时捕捉工件的图像,利用图像处理技术对捕捉到的工件图像进行处理分析,通过视觉检测装配后的工件以确定工件是否存在质量问题,其质量问题包括工件是否装配到位、工件表面是否有裂纹及零件是否有装配遗落的情况出现,便于后续对残次品及时进行回收处理,有效的提高了检测的准确性,且这种非接触式的检测方式可以避免对产品造成二次污染,照明灯为了确保高分辨率摄像头所捕捉图像的质量。
21、3、本发明通过安装有雾化喷头和毛刷然后电动伸缩杆二下移,使得毛刷与工件相接触,同时启动伺服电机二,进而带动丝杆二转动,使得衔接件二、电动伸缩杆二和毛刷沿着引导杆三的方向移动,控制伺服电机二正反转,使得毛刷来回移动以对工件产生来回摩擦力,将工件表面的粉尘、油污及其他污染物清理掉,便于后续通过视觉检测判断装配是否存在问题,减少其他因素对检测过程的影响。
22、4、本发明通过安装有监控摄像头,将装配完成后的工件放置在传送带上,在传送带的带动下向清理箱移动,在进入清理箱前,监控摄像头对工件进行图像捕捉,并利用图像分析技术对捕捉到的工件图像进行分析处理,检测工件表面是否有粉尘、油污及其他污染物,避免由于工件表面的污染物影响后续工件装配质量的检测。
本文地址:https://www.jishuxx.com/zhuanli/20240725/133671.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表