一种基于双目视觉的特种车目标特征识别装置的制作方法
- 国知局
- 2024-07-29 10:54:38
本技术属于目标识别装置的,尤其涉及一种基于双目视觉的特种车目标特征识别装置。
背景技术:
1、汽车在雾天、雨雪天、雾霾天或夜间能见度很低的情况下行驶时,追尾事故的发生率较高,为了避免追尾事故的发生,许多汽车上都搭载有检测车距的装置,目前,广泛应用的车距检测方法是雷达的测距方式。
2、现有的中国专利数据库中,公开了名称为基于双目视觉和超声雷达的辅助驾驶车距识别系统的专利,申请号为cn201820196930.2,申请日为20180205,公告号为cn207946524u,公告日为20181009,该装置包括高速运算装置,以及通过数据线与之相连接的双目相机系统、超声波雷达、切换控制装置、车距报警装置、车距提示装置和车身测速装置;切换控制装置通过判断不同的车速和天气状况,控制双目相机系统和超声波雷达的工作状态以选择合理的识别方式,车身测速装置用于测量车辆行驶速度,作为辅助判断车距危险程度的依据;车距提示装置提示当前车辆与周围车辆的间距以及间距危险程度,车外报警系统当发现车距危险性后,在车辆外围发出声光报警提示周围车辆避让,达到了设计一种可靠性高、测量精度高、速度快等多种优势于一体的智能障碍物检测装置的技术目的。
3、由于特种车辆行驶的环境路段较为恶劣,因此市场会导致双目视觉摄像头在行驶过程中被泥土块等其他污垢遮挡,从而降低目标识别的准确性,因此,本文旨在提出一种能够自身进行摄像头表面清洁的特种车目标特征识别装置,便于在恶劣环境下使用。
技术实现思路
1、本实用新型要解决的技术问题是特种车辆在恶劣环境路段下行驶过程中,会存在泥土块等污垢附着在双目视觉摄像头表面,导致摄像头对于目标识别的准确性降低,为了改善其不足之处,本实用新型提供了一种基于双目视觉的特种车目标特征识别装置。
2、为达到上述目的,本实用新型是通过以下技术方案实现的:
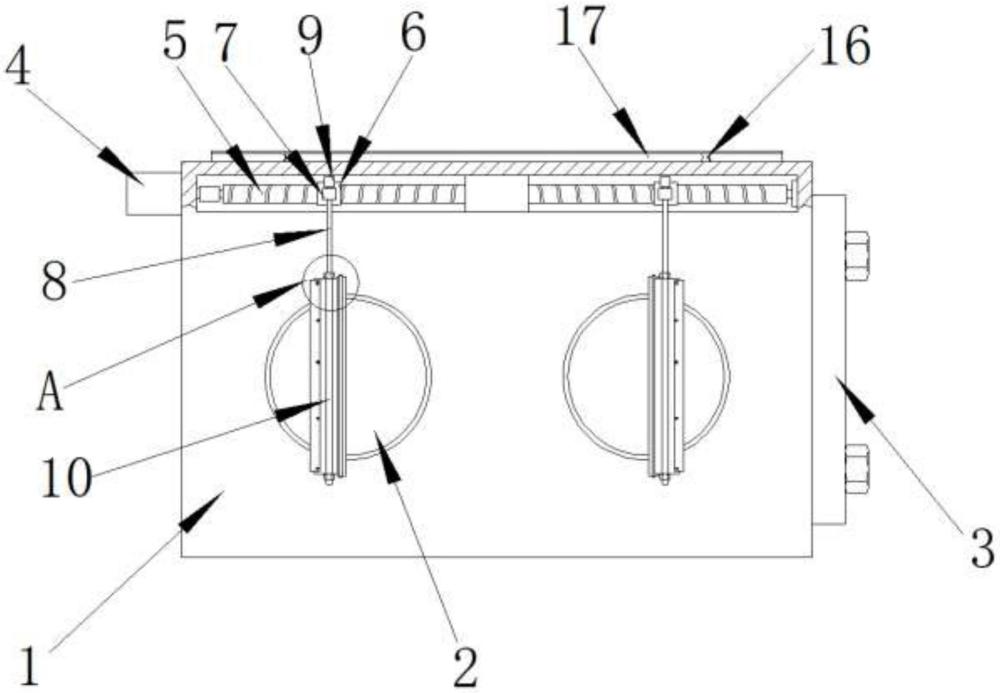
3、一种基于双目视觉的特种车目标特征识别装置,包括有盒体,所述盒体侧面设置有开口,开口内放置有双目视觉传感器,开口经封板封堵,盒体外设置有电机,电机的输出轴自由端轴接有水平的双向丝杠,双向丝杠位于盒体内设置,双向丝杠上套接有丝杆螺母,各丝杆螺母上设置有连接块,连接块内穿插有竖直的转动轴,转动轴上端与驱动马达连接,转动轴下端连接有清理部件,驱动马达控制转动轴的转动,调节清理部件的角度。
4、本实用新型工作时,盒体设置在特种车辆的前端或后端,特种车辆的驾驶人员利用特种车内部的plc控制与电机以及驱动马达电性连接,完成电机以及驱动马达的操控,利用电机带动双向丝杠转动,从而带动清理部件在双目视觉传感器的摄像头表面来回移动,将附着在盒体表面的泥土块进行清理。
5、作为优选方案,所述清理部件包括有v型板,v型板内侧设置有插接转动轴的圆管,位于圆管两侧的转动轴上旋接有限位螺母,所述限位螺母抵触在v型板的端面上,v型板一边缘连接有清污板,清污板边檐呈尖刺状设置,v型板另一边缘设置有清污布。清污板与清污布的设置,配合驱动马达,能够调节清污板以及清污布交替与双目视觉传感器的表面贴合,先将残留在双目视觉传感器表面的泥土块通过清污板的尖刺部剔除,剔除完成后通过清污布进行擦拭,提高双目视觉传感器表面清理的干净程度。
6、作为优选方案,所述清污布贴合在v型板边檐设置,还包括有限位框架,所述限位框架套接在v型板边檐,限位框架上下端均旋接有锁紧螺栓,所述锁紧螺栓自由端将清污布抵触在v型板端面上。
7、作为优选方案,所述清污板内侧边经螺钉与v型板边缘固接。清污布与清污板的可拆卸设置,便于操作人员快速进行其更换。
8、作为优选方案,所述盒体上表面设置有纵向的滑轨,滑轨上滑动连接有防护盖板。防护盖板的设置能够有效地对双目视觉传感器的摄像头表面进行保护,在雨天起到防止雨水使双目视觉传感器的摄像头表面模糊,从而导致目标识别不准确的问题,同时能够解决太阳光反光的问题。
9、与现有技术相比,本实用新型的有益效果是:
10、1.该装置通过在双目视觉传感器的摄像头外表面处设置清理部件,能够在恶劣行驶环境下保持双目视觉传感器的摄像头始终清晰,提高目标识别的准确性;
11、2.通过清污板与清污布的设置,先将残留在双目视觉传感器表面的泥土块通过清污板的尖刺部剔除,剔除完成后通过清污布进行擦拭,避免保持双目视觉传感器的摄像头模糊,该装置适用于工业生产中,具有很强的实用性。
技术特征:1.一种基于双目视觉的特种车目标特征识别装置,其特征在于:包括有盒体,所述盒体侧面设置有开口,开口内放置有双目视觉传感器,开口经封板封堵,盒体外设置有电机,电机的输出轴自由端轴接有水平的双向丝杠,双向丝杠位于盒体内设置,双向丝杠上套接有丝杆螺母,各丝杆螺母上设置有连接块,连接块内穿插有竖直的转动轴,转动轴上端与驱动马达连接,转动轴下端连接有清理部件,驱动马达控制转动轴的转动,调节清理部件的角度。
2.根据权利要求1所述的一种基于双目视觉的特种车目标特征识别装置,其特征在于:所述清理部件包括有v型板,v型板内侧设置有插接转动轴的圆管,位于圆管两侧的转动轴上旋接有限位螺母,所述限位螺母抵触在v型板的端面上,v型板一边缘连接有清污板,清污板边檐呈尖刺状设置,v型板另一边缘设置有清污布。
3.根据权利要求2所述的一种基于双目视觉的特种车目标特征识别装置,其特征在于:所述清污布贴合在v型板边檐设置,还包括有限位框架,所述限位框架套接在v型板边檐,限位框架上下端均旋接有锁紧螺栓,所述锁紧螺栓自由端将清污布抵触在v型板端面上。
4.根据权利要求3所述的一种基于双目视觉的特种车目标特征识别装置,其特征在于:所述清污板内侧边经螺钉与v型板边缘固接。
5.根据权利要求1-4中任一权利要求所述的一种基于双目视觉的特种车目标特征识别装置,其特征在于:所述盒体上表面设置有纵向的滑轨,滑轨上滑动连接有防护盖板。
技术总结本技术涉及一种基于双目视觉的特种车目标特征识别装置。该装置包括有盒体,所述盒体侧面设置有开口,开口内放置有双目视觉传感器,开口经封板封堵,盒体外设置有电机,电机的输出轴自由端轴接有水平的双向丝杠,双向丝杠位于盒体内设置,双向丝杠上套接有丝杆螺母,各丝杆螺母上设置有连接块,连接块内穿插有竖直的转动轴,转动轴上端与驱动马达连接,转动轴下端连接有清理部件,驱动马达控制转动轴的转动,调节清理部件的角度,通过清污板与清污布的设置,先将残留在双目视觉传感器表面的泥土块通过清污板的尖刺部剔除,剔除完成后通过清污布进行擦拭,避免保持双目视觉传感器的摄像头模糊,该装置适用于工业生产中,具有很强的实用性。技术研发人员:段锦,睢枫,潘海冰洋受保护的技术使用者:扬州安驾大数据有限公司技术研发日:20230425技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240725/133833.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表