一种湿喷台车自动作业控制系统的制作方法
- 国知局
- 2024-07-27 10:38:15
本技术涉及湿喷台车领域,具体涉及一种湿喷台车自动作业控制系统。
背景技术:
1、湿喷台车是一种用于隧道建设、地下工程建设的机械,它将混凝土以很高的速度喷射到施工面,从而在喷射表面形成混凝土支撑层,为防止喷射的混凝土回弹掉落,在混凝土中按比例混合了速凝剂,该化学物质具有强碱性且有挥发性和强烈气味,在湿喷作业时会弥漫在施工区域。
2、传统的施工是由操作手近距离利用遥控器对湿喷台车的臂架进行遥控,让臂架末端喷嘴对准施工面进行湿喷,由于在湿喷作业时速凝剂会弥漫在施工区域,因此会对人身体有很大的危害。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种湿喷台车自动作业控制系统,以克服上述现有技术中的不足。
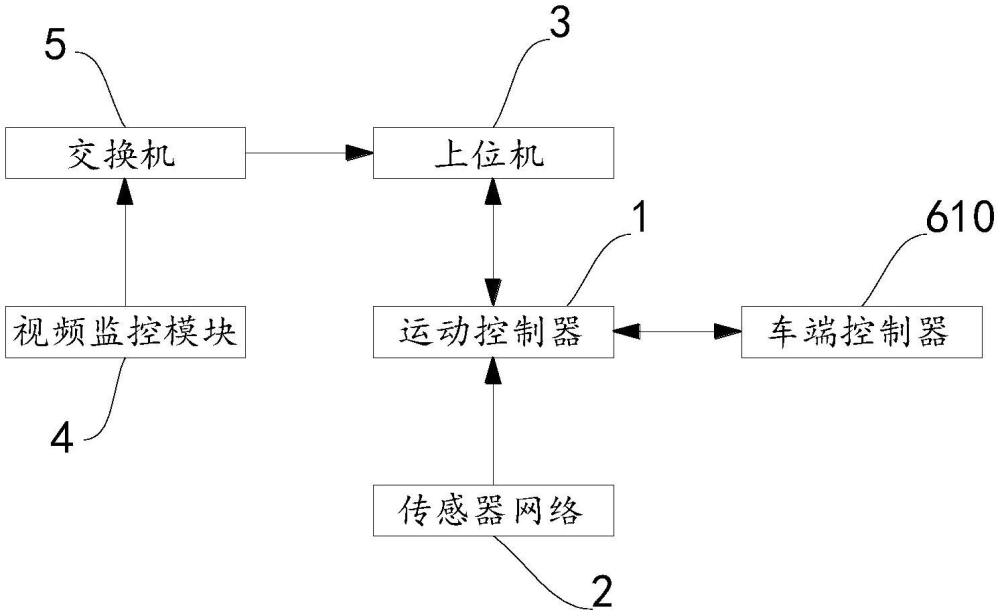
2、本实用新型解决上述技术问题的技术方案如下:一种湿喷台车自动作业控制系统,包括:运动控制器,运动控制器与湿喷台车的车端控制器电连接,以接收湿喷速率信号;湿喷台车的臂架上设置用以获取臂架姿态信息的传感器网络,运动控制器与传感器网络电连接;运动控制器与用以生成运动轨迹以及各作业点湿喷厚度信息的上位机电连接。
3、在上述技术方案的基础上,本实用新型还可以做如下改进。
4、进一步,上位机与视频监控模块电连接。
5、进一步,视频监控模块为车端网络云台相机。
6、进一步,视频监控模块通过交换机与上位机电连接。
7、进一步,运动控制器内含减振控制系统。
8、本实用新型的有益效果是:
9、根据上位机上的图形示教点,操作湿喷台车的臂架,由臂架带动喷嘴到达湿喷区域边界点,以拾取湿喷区域边界点,从而确定湿喷区域运动轨迹以及各作业点湿喷厚度信息;
10、示教过程中传感器网络实时将所获取的臂架姿态信息发送给运动控制器,然后由运动控制器通过计算确定喷嘴相对湿喷台车的实时位置、运动速度、角度和加速度;
11、上位机确定运动轨迹以及各作业点湿喷厚度信息,上位机下达指令,运动控制器读取上位机所生成的运动轨迹,运动控制器根据运动轨迹规划各时刻湿喷台车的臂架姿态,并对应控制湿喷台车运动机构动作;
12、运动控制器再根据各作业点湿喷厚度信息,生成喷嘴在各作业点的驻留时间和湿喷速率;
13、最后由运动控制器控制湿喷台车按运动轨迹以及各作业点湿喷厚度信息执行自动喷湿作业任务;
14、在执行完一次自动湿喷作业后,操作手根据湿喷效果确实是否有补喷区域,若有,则再次进行示教,然后在上位机上重新确定运动轨迹以及各作业点湿喷厚度信息以进行补喷,运动控制器再控制湿喷台车执行自动补喷作业任务;
15、通过上述技术方案本实用新型可远程通过上位机对湿喷台车下达指令进行自动湿喷,减少人员在施工现场停留,保障施工人员身体状况,可自动、精确的控制湿喷台车喷嘴的运动,同时大大提高了湿喷效率和质量,并且通过上位机可实时监控湿喷台车运行状况;
16、通过视频监控模块可远程监控湿喷作业,以便上位机对运动控制器下达指令,让湿喷台车进行自动化操作,或远程干预湿喷动作;
17、运动控制器内含减振控制系统,通过湿喷台车的转台、臂架,以及安装在臂架上的传感器网络构建臂架运动学模型,确定臂架运行时实时姿态,检测臂架振动幅度,运动控制器主动发出信号驱动臂架液压运动系统对臂架振动实施反向力,使臂架运动时更加平稳,达到减振效果。
技术特征:1.一种湿喷台车自动作业控制系统,其特征在于,包括:运动控制器(1),所述运动控制器(1)与湿喷台车(6)的车端控制器(610)电连接,以接收湿喷速率信号;所述湿喷台车(6)的臂架(620)上设置用以获取臂架(620)姿态信息的传感器网络(2),所述运动控制器(1)与所述传感器网络(2)电连接;所述运动控制器(1)与用以生成运动轨迹以及各作业点湿喷厚度信息的上位机(3)电连接。
2.根据权利要求1所述的一种湿喷台车自动作业控制系统,其特征在于:所述上位机(3)与视频监控模块(4)电连接。
3.根据权利要求2所述的一种湿喷台车自动作业控制系统,其特征在于:所述视频监控模块(4)为车端网络云台相机。
4.根据权利要求2或3所述的一种湿喷台车自动作业控制系统,其特征在于:所述视频监控模块(4)通过交换机(5)与上位机(3)电连接。
5.根据权利要求1所述的一种湿喷台车自动作业控制系统,其特征在于:所述运动控制器(1)内含减振控制系统。
技术总结本技术涉及一种湿喷台车自动作业控制系统,包括:运动控制器,运动控制器与湿喷台车的车端控制器电连接,以接收湿喷速率信号;湿喷台车的臂架上设置用以获取臂架姿态信息的传感器网络,运动控制器与传感器网络电连接;运动控制器与用以生成运动轨迹以及各作业点湿喷厚度信息的上位机电连接。有益效果为:通过上述技术方案本技术可远程通过上位机对湿喷台车下达指令进行自动湿喷,减少人员在施工现场停留,保障施工人员身体状况,可自动、精确的控制湿喷台车喷嘴的运动,同时大大提高了湿喷效率和质量,并且通过上位机可实时监控湿喷台车运行状况。技术研发人员:严寅辉,张新林,赵璞,李绍金受保护的技术使用者:武汉岚谱智能科技有限公司技术研发日:20230807技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240726/114447.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表