一种智能锚杆锚索钻机及煤岩识别和防堵钻方法与流程
- 国知局
- 2024-07-27 10:53:33
本发明属于巷道支护的,具体公开了一种智能锚杆锚索钻机及煤岩识别和防堵钻方法。
背景技术:
1、锚杆锚索支护是一种快速、安全、经济的巷道和隧道支护方式,是目前巷道和隧道支护先进技术的代表,是煤矿巷道和地面隧道支护技术的发展方向。在澳大利亚、英国、美国、南非等世界主要产煤国,锚杆支护技术已经得到广泛应用。目前,我国煤矿数量8000处左右,每年巷道掘进量超过8000km,其中综合机械化掘进量(综掘)占比90%以上。大中型煤矿巷道的锚杆锚索支护率达到60%,有些矿区已经超过90%。经过实践证明,锚杆锚索支护是煤巷经济、有效的支护技术。
2、但是,现阶段锚杆锚索钻机的控制方式大多数仍停留在以人工操作为主、局部自动操作为辅的层面,但尚未实现钻机钻进自主控制。
技术实现思路
1、本发明提供了一种智能锚杆锚索钻机及煤岩识别和防堵钻方法,可实现钻机钻进自主控制。
2、本发明提供一种智能锚杆锚索钻机,包括机架、进给油缸、进给电磁阀、进给压力传感器、进给位移传感器、钻箱、与钻箱连接的钻杆、钻杆旋转电磁阀、钻杆压力传感器、钻杆转速传感器、水系统和电气控制系统;进给油缸安装在机架上,用于驱动钻箱和钻杆移动,由进给电磁阀控制液压油的输入流量;进给压力传感器与进给电磁阀的测压接口连接,通过感应测压接口处液压油的压力变化获取钻杆的进给压力;进给位移传感器安装在机架上,用于获取进给位移和进给速度;钻箱的旋转马达用于驱动钻杆旋转,由钻杆旋转电磁阀控制液压油的输入流量;钻杆压力传感器与钻杆旋转电磁阀的测压接口连接,通过感应测压接口处液压油的压力变化获取钻杆旋转压力;钻杆转速传感器安装在钻箱上,用于获取钻杆转速;电气控制系统接收传感器数据,通过gabp神经网络识别岩石和煤炭,按照设定好的煤炭或岩石的最佳锚护控制参数作为控制目标,采用pid控制器控制进给油缸的液压油流量、旋转马达的液压油流量、水系统的水流量。
3、上述智能锚杆锚索钻机还包括液压系统和视觉系统。
4、本发明提供一种基于上述智能锚杆锚索钻机的煤岩识别和防堵钻方法,包括下述步骤:
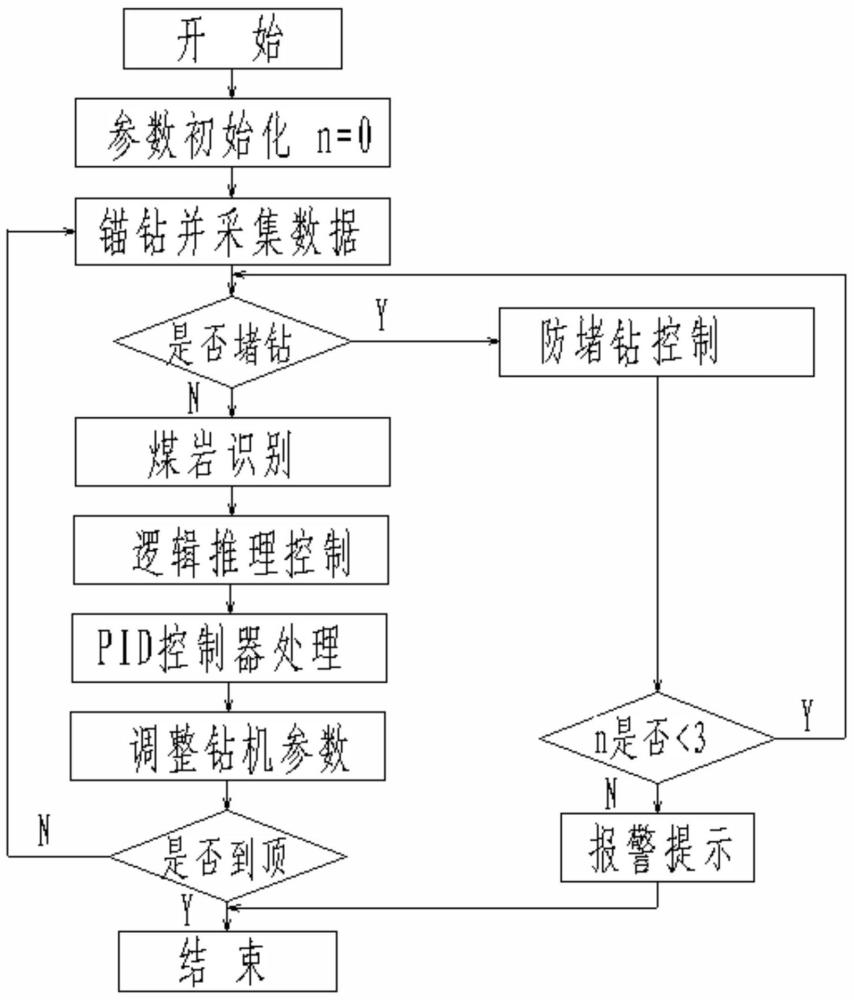
5、s1,通过进给压力传感器、进给位移传感器、钻杆压力传感器、钻杆转速传感器获取进给压力、进给位移、钻杆旋转压力、钻杆转速;
6、s2,根据进给位移是否为零判断是否堵钻:
7、若进给位移不为零,则钻进正常,通过gabp神经网络识别岩石和煤炭,按照设定好的煤炭或岩石的最佳锚护控制参数作为控制目标,采用pid控制器对进给速度、钻杆转速、水流量进行闭环控制;
8、若进给位移为零,则启动防堵钻程序,pid控制器控制进给油缸在原位置后退,然后增加进给油缸的液压油流量、旋转马达的液压油流量和水系统的水流量,进给油缸向上移动冲击岩层,如在设定次数内完成破岩,则继续根据进给位移是否为零判断是否堵钻,如在设定次数内未能完成破岩,则报警终止进给。
9、上述煤岩识别和防堵钻方法中,利用ga遗传算法得到最优网络权值及阈值作为bp神经网络模型的初始网络权值及阈值;
10、其中bp神经网络模型采用三层bp神经网络结构,输入层包含4个神经元,分别对应输入的进给压力、进给位移、钻杆旋转压力和钻杆转速,输出层包含2个神经元,分别对应所需识别的岩石和煤炭,输入为锚钻参数数据集,输出为控制参数矩阵,进行数据训练、验证和测试,实现煤岩识别。
11、上述煤岩识别和防堵钻方法中,pid控制器通过电液比例阀控制进给速度和钻杆转速,电液比例阀的输入量为电流信号,输出量为输出流量,电液比例阀的传递函数表示为:
12、q=k*(1+td*s)/(1+t1*s)
13、其中,q为输出流量,k为比例增益,td为微分时间常数,t1为一阶惯性时间常数,s为laplace变换中的复变量。
14、上述煤岩识别和防堵钻方法中,pid控制器采用模糊pid控制器;
15、模糊pid控制器的三个参数kp,ki,kd为在线调整方式,其中kp为比例环节的参数,ki为积分环节的参数,kd为微分环节的参数。
16、与现有技术相比,本发明具有以下有益效果。
17、1、本发明可缩短支护施工的时间,面对复杂的地层环境可自适应控制钻进速度、用水流量保护钻头,总体改善了钻机对复杂地质条件的适应能力,可提高在硬质岩层中锚护的成功率,最终可降低20%的施工时间,能够自动完成整个锚钻过程,并能与地质和测井等专业进行大数据融合,从而有效提高巷道支护效率及作业安全性。
18、2、本发明以人工智能等方法为手段,建立了一种集信息收集、数据处理、智能决策、设备控制、远程通讯等为一体,多系统联合协同工作的闭环式控制系统,用以满足锚杆锚索钻机的智能化操作及煤矿开采智能化控制,可以实现锚钻数据的储存和传输,可将多个钻机数据综合判断地层状态、锚护效果等因数,采用大数据分析手段做出安全判断和锚钻参数的调整,实现多个钻机协同锚护。
19、3、本发明基于gabp算法,精选样本数据后对网络进行训练,训练成功后的网络即可对其进行有效的控制,识别效率高,识别准确,降低了使用成本,大大降低了控制系统的开发成本。
20、4、本发明首先设计gabp神经网络煤岩识别程序和防堵钻程序,产生控制目标数据集,然后采用模糊pid控制算法实现钻机钻进自主控制,实现多变煤岩构造、地层条件变化下锚钻适应性、精确性的自动控制,可靠性高,实现了支护作业自动煤岩识别和防堵钻控制,大大提高了工作效率和适用范围,模糊控制与pid控制相结合的算法,精准控制进给速度、钻杆转速及水流量,保证钻机时刻工作在高效率区。
21、5、防堵钻程序通过冲击钻进方式提高了不同地质条件下顶板的适应性,同时,也采取了相应的保护程序,避免在无人值守时工作长时间过载,保护了设备。
22、6、本发明可降低操作人数,提高生产效率,减少了工作面的人数,减少的人员成本。
23、7、本发明可精确控制锚钻时用水量的大小,提高用水效率,减少了废水的排放,特别对于泥质底板可减轻对于地面的破坏。
24、8、由于煤矿井下和隧道施工作业环境恶劣、存在危险性,加之媒体长期高度关注,社会舆论对煤炭行业普遍存在看法,年轻一代从事煤炭采掘行业和隧道施工行业意愿较低,导致企业人员招募困难,劳动力成本逐年上升,工人老龄化的问题逐渐突出,因此,煤矿开采和隧道掘进自动化是大势所趋,施工单位纷纷提出了采掘工作面自动化、智能化计划,其中自动锚杆支护技术最为迫切和最为困难的,本发明对加快锚护速度,提高安全性,降低工人工作强度,实现锚杆支护全过程的自动化、智能化,具有意义重大。
技术特征:1.一种智能锚杆锚索钻机,其特征在于,包括机架、进给油缸、进给电磁阀、进给压力传感器、进给位移传感器、钻箱、与钻箱连接的钻杆、钻杆旋转电磁阀、钻杆压力传感器、钻杆转速传感器、水系统和电气控制系统;
2.根据权利要求1所述的智能锚杆锚索钻机,其特征在于,还包括液压系统和视觉系统。
3.一种基于权利要求1或2所述智能锚杆锚索钻机的煤岩识别和防堵钻方法,其特征在于,包括下述步骤:
4.根据权利要求3所述的煤岩识别和防堵钻方法,其特征在于,利用ga遗传算法得到最优网络权值及阈值作为bp神经网络模型的初始网络权值及阈值;
5.根据权利要求3所述的煤岩识别和防堵钻方法,其特征在于,pid控制器通过电液比例阀控制进给速度和钻杆转速,电液比例阀的输入量为电流信号,输出量为输出流量,电液比例阀的传递函数表示为:
6.根据权利要求5所述的煤岩识别和防堵钻方法,其特征在于,pid控制器采用模糊pid控制器;
技术总结本发明提供了一种智能锚杆锚索钻机及煤岩识别和防堵钻方法,属于巷道支护的技术领域,智能锚杆锚索钻机包括机架、进给油缸、进给电磁阀、进给压力传感器、进给位移传感器、钻箱、与钻箱连接的钻杆、钻杆旋转电磁阀、钻杆压力传感器、钻杆转速传感器、水系统和电气控制系统。煤岩识别和防堵钻方法首先设计GABP神经网络煤岩识别程序和防堵钻程序,产生控制目标数据集,然后采用模糊PID控制算法实现钻机钻进自主控制、煤岩识别和防堵钻。技术研发人员:康鹏,代立明,张云波,韩鹏程,安飞,吕继双,米雄伟,周廷,闫金宝,年魁,杨小凤,张福祥,米豪鼎,宋扬,马祺杰受保护的技术使用者:中国煤炭科工集团太原研究院有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240726/116251.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表