一种分级扩孔钻进施工方法与控制系统与流程
- 国知局
- 2024-07-27 10:54:19
本发明属于桥梁施工,尤其涉及一种分级扩孔钻进施工方法与控制系统。
背景技术:
1、大直径灌注桩钻进遇中、微风化硬岩持力层时,通常采用分级扩孔钻进工艺,即以小直径旋挖钻头从桩中心处钻入, 至桩底设计标高后再逐级扩大钻孔直径,直至钻进达到设计桩径。这种分级扩孔工艺将旋挖钻机的动力和扭矩最大限度地传递至旋挖钻头,可实现硬岩的快速钻进,已被广泛应用于旋挖硬岩钻进中。申请人在实际施工过程中也广泛利用该项技术,据此也提出多项专利申请并部分公开已经获得授权(例如cn114108611b、cn117661557a、cn117587802a等)。
2、然而,发明人进一步的工程实践中发现,上述现有技术在实际应用时,分级扩孔的每一级钻进距离都是由现场施工人员实际经验确定,带有较强的主观因素,不利于技术的广泛推广;分级扩孔过程中需要时刻人工预估钻进深度以更换钻头,影响施工效率;频繁的钻进中断也会使得孔内扩孔钻杆弯曲变形现象加剧,造成钻杆柱的过早疲劳损伤,对于扩孔钻进施工造成极大的安全隐患。
3、为此,申请人在现有技术的基础上,结合进一步的工程实践总结和计算机技术,进一步提出本申请的技术方案。
技术实现思路
1、本发明提出的一种分级扩孔钻进施工方法与控制系统,可用于大直径钻孔灌注桩分级扩孔钻进施工过程,采用自动化的深度探测与时间控制,避免主观因素,能有效防止桩基缩孔、扩径、塌孔、钻杆柱的过早疲劳损伤等施工问题。
2、具体的,在本发明的第一个方面,提出一种分级扩孔钻进施工方法,所述方法包括如下步骤:
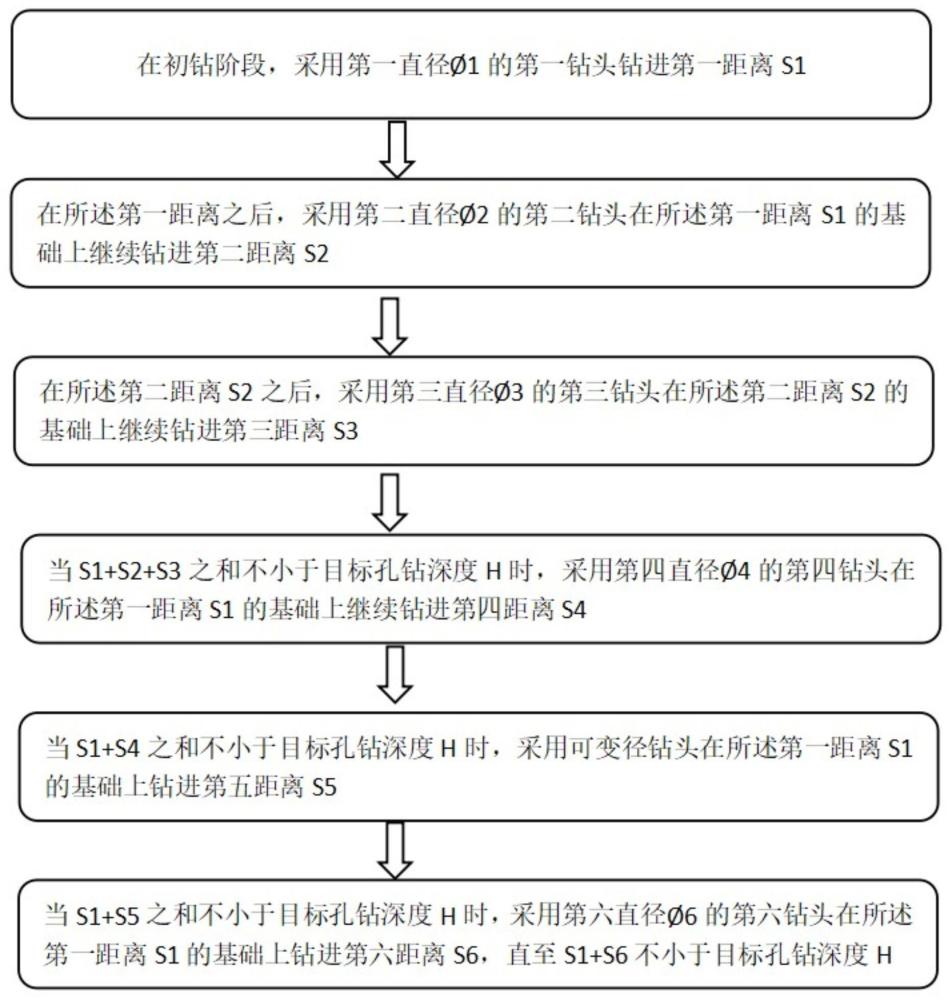
3、在初钻阶段,采用第一直径ø1的第一钻头钻进第一距离s1;
4、在所述第一距离之后,采用第二直径ø2的第二钻头在所述第一距离s1的基础上继续钻进第二距离s2;
5、在所述第二距离s2之后,采用第三直径ø3的第三钻头在所述第二距离s2的基础上继续钻进第三距离s3;
6、当s1+s2+s3之和不小于目标孔钻深度h时,采用第四直径ø4的第四钻头在所述第一距离s1的基础上继续钻进第四距离s4;
7、当s1+s4之和不小于目标孔钻深度h时,采用可变径钻头在所述第一距离s1的基础上钻进第五距离s5;
8、当s1+s5之和不小于目标孔钻深度h时,采用第六直径ø6的第六钻头在所述第一距离s1的基础上钻进第六距离s6,直至s1+s6不小于目标孔钻深度h;
9、其中,所述第一钻头为捞沙斗钻头,所述第二钻头为截齿钻头,所述第三钻头为牙轮钻头;所述第四钻头和所述第六钻头均为扩孔钻头;所述ø1>ø2; ø1>ø3; ø1>ø4;ø4>ø2,ø4>ø3;所述第一直径ø1和第六直径ø6均等于目标钻孔直径w。
10、其中,所述第一距离s1基于钻孔现场采样的地质柱状图确定,在所述第一距离s1内包含粉细砂层、淤泥质粘土、粉质黏土和砾砂层。
11、在所述第一距离之后,采用第二直径ø2的第二钻头在所述第一距离s1的基础上继续钻进第二距离s2,具体包括:
12、采用第二直径ø2的第二钻头之后,每隔预定周期t获取当前已钻进距离,从而得到多个已钻进距离序列{s2,1,s2,2,……,s2,k,……};k=1,2,……;
13、若,则将作为第二距离s2。
14、进一步的,在采用第六直径ø6的第六钻头在所述第一距离s1的基础上钻进第六距离s6之后,改用扫孔器进行扫孔,扫孔完成后使用泥皮清理器清理护筒内壁。
15、距离测量采用自动化配置手段,主要包括:采用全自动超声波或者现场测绳获取所述第一距离s1、第二距离s2、第三距离s3、第四距离s4、第五距离s5以及第六距离s6。
16、在本发明的第二个方面,提出一种分级扩孔钻进施工的控制系统,所述控制系统包括钻孔子系统、测量子系统以及控制子系统;
17、其中,所述钻孔子系统包括可更换的钻头;
18、所述控制子系统用于获取钻孔现场采样的地质柱状图,基于所述地质柱状图确定初始钻进距离h1;
19、所述钻孔子系统装配第一直径ø1的第一钻头;
20、所述控制子系统控制所述第一钻头钻进第一距离h1后,
21、所述钻孔子系统更换第二直径ø2的第二钻头;
22、所述控制子系统控制所述钻孔子系统继续钻进;
23、所述测量子系统每隔预定周期t1采集所述第二钻头的当前已钻进距离,获得至少三个连续周期采集的三个已钻进距离值sa、sb、sc;
24、若,则所述钻孔子系统更换第三直径ø3的第三钻头;
25、所述控制子系统控制所述钻孔子系统继续钻进;
26、所述测量子系统每隔预定周期t2采集所述第三钻头的当前已钻进距离h3;
27、当h3≥h时,所述钻孔子系统更换第四直径ø3的第四钻头;
28、所述控制子系统控制所述钻孔子系统继续钻进;所述测量子系统每隔预定周期t3采集所述第四钻头的当前已钻进距离h4;
29、当h4≥h时,所述钻孔子系统更换可变径钻头;
30、所述控制子系统控制所述钻孔子系统继续钻进;所述测量子系统每隔预定周期t4采集所述可变径钻头的当前已钻进距离h5;
31、当h5≥h时,所述钻孔子系统更换第六直径ø6的第六钻头;
32、所述控制子系统控制所述钻孔子系统继续钻进;所述测量子系统每隔预定周期t5采集所述第六钻头的当前已钻进距离h6;
33、当h6≥h时,停止钻进;
34、其中,所述h为预设的目标孔钻深度;所述ø1>ø2; ø1>ø3; ø1>ø4;ø4>ø2,ø4>ø3;所述第一直径ø1、第六直径ø6均等于目标钻孔直径w。
35、所述测量子系统采用全自动超声波或者现场测绳。
36、所述第一钻头为捞沙斗钻头,所述第二钻头为截齿钻头,所述第三钻头为牙轮钻头;所述第四钻头和所述第六钻头均为扩孔钻头。
37、所述控制子系统用于控制钻头的旋转速度,并监控钻头的垂直度;
38、将钻头的垂直度偏差超过预设值时,停止当前钻进过程调整所述垂直度。
39、所述系统还包括扫孔器;
40、在停止钻进之后,控制扫孔器进行扫孔,扫孔完成后使用泥皮清理器清理护筒内壁。
41、实际应用中,旋挖钻取芯扩孔采用分级扩孔工艺,有效防止桩基缩孔、扩径、塌孔等施工问题;通过科学严格的取芯扩孔钻孔工艺和专用钻具可以使桩基竖直度满足要求。
42、本发明的进一步优点将结合说明书附图在具体实施例部分进一步详细体现。
技术特征:1.一种分级扩孔钻进施工方法,其特征在于,所述方法包括如下步骤:
2.如权利要求1所述的一种分级扩孔钻进施工方法,其特征在于:
3.如权利要求1所述的一种分级扩孔钻进施工方法,其特征在于:
4.如权利要求1所述的一种分级扩孔钻进施工方法,其特征在于:
5.如权利要求1或3所述的一种分级扩孔钻进施工方法,其特征在于:
6.一种分级扩孔钻进施工的控制系统,所述控制系统包括钻孔子系统、测量子系统以及控制子系统,其特征在于:
7.如权利要求6所述的一种分级扩孔钻进施工的控制系统,其特征在于:
8.如权利要求6所述的一种分级扩孔钻进施工的控制系统,其特征在于:
9.如权利要求6所述的一种分级扩孔钻进施工的控制系统,其特征在于:
10.如权利要求6所述的一种分级扩孔钻进施工的控制系统,其特征在于:
技术总结本发明提出分级扩孔钻进施工方法与控制系统,涉及桥梁施工技术领域。方法包括:在初钻阶段,采用第一直径Ø1的第一钻头钻进第一距离S1;然后采用第二直径Ø2的第二钻头继续钻进第二距离S2;接下来采用第三直径Ø3的第三钻头继续钻进第三距离S3;当S1+S2+S3之和不小于目标孔钻深度H时,采用第四直径Ø4的第四钻头继续钻进第四距离S4;当S1+S4之和不小于H时,采用可变径钻头钻进第五距离S5;当S1+S5之和不小于H时,采用第六直径Ø6的第六钻头钻进第六距离S6,直至S1+S6不小于H。该技术方案能够基于现场条件和设备参数实现自动化控制,避免主观因素影响的同时提高了钻孔效率,便于推广以利于降低施工成本。技术研发人员:何超,贾英,赵凡,张海,吴天新受保护的技术使用者:中铁十一局集团有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240726/116345.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。