一种用于隧道衬砌质量雷达检测的作业机械臂的制作方法
- 国知局
- 2024-07-27 10:58:26
本技术涉及隧道检测机构,具体为一种用于隧道衬砌质量雷达检测的作业机械臂。
背景技术:
1、隧道是埋置于地层内的工程建筑物,是人类利用地下空间的一种形式。隧道可分为交通隧道、水工隧道、市政隧道、矿山隧道、军事隧道。隧道的结构包括主体建筑物和附属设备两部分。主体建筑物由洞身和洞门组成,附属设备包括避车洞、消防设施、应急通讯和防排水设施,长的隧道还有专门的通风和照明设备。
2、隧道的挖掘采用盾构法,盾构法是暗挖法施工中的一种全机械化施工方法,它是将盾构机械在地中推进,通过盾构外壳和管片支承四周围岩防止发生往隧道内的坍塌,同时在开挖面前方用切削装置进行土体开挖,通过出土机械运出洞外,靠千斤顶在后部加压顶进,并拼装预制混凝土管片,形成隧道结构的一种机械化施工方法。
3、在采用盾构法施工结束后,通常需要采用探地雷达对隧道衬质量进行检测,目前盾构隧道衬砌质量雷达检测一般采用现场焊接可移动工作台架,攀爬至台架上人力托举仪器,人工推动台架进行检测。台架移动速度慢并需要多人操控造成检测效率较低;因其作业时人员位于台架之上,属于高空作业,作业过程具有较大的安全隐患。
技术实现思路
1、本实用新型针对上述现有技术存在的问题,提供一种用于隧道衬砌质量雷达检测的作业机械臂。
2、为实现以上目的,本实用新型通过以下技术方案予以实现:
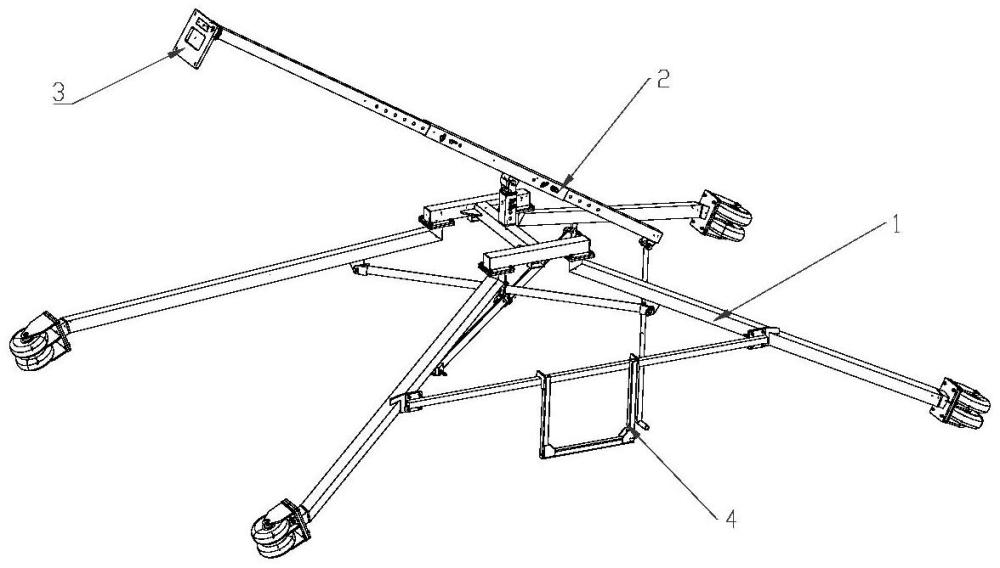
3、一种用于隧道衬砌质量雷达检测的作业机械臂,包括滑行架,所述滑行架上方设有伸缩悬臂,所述伸缩悬臂转动式设置在滑行架上,其上端设有安装座,安装座用于安装探测器。
4、进一步地,所述滑行架包括连接框,连接框的下方设有多个支撑腿,支撑腿的上端和连接框连接,下端连接有滑行轮。
5、进一步地,所述支撑腿和连接框的上表面之间具有夹角α,夹角α的大小为30°-45°。
6、进一步地,所述连接框包括至少一组安装杆,相邻安装杆之间通过连接杆连接,安装杆的端部和支撑腿连接。
7、进一步地,所述支撑腿包括支撑腿本体,支撑腿本体的上端连接有转接腿,转接腿的上端连接有安装板二。
8、进一步地,所述支撑腿本体之间设有加强结构,加强结构包括一对相互交叉的加强杆,各加强杆的端部分别与各支撑腿本体可拆卸连接。
9、进一步地,相互交叉的加强杆之间通过连接件可拆卸连接。
10、进一步地,所述伸缩悬臂包括臂体,臂体上设有旋转座,旋转座和连接框可拆卸连接。
11、进一步地,所述臂体的下端还可拆卸连接有操作手柄。
12、进一步地,所述滑行架下方还连接有推拉组件,推拉组件包括连接臂,连接臂的两端均与滑行架连接,连接臂下方还设有牵引框。
13、本实用新型的有益效果:
14、本实用新型提供的隧道衬砌质量雷达检测的作业机械臂克服了现有检测方式需要人力多、速度慢、存在高空作业安全隐患的不足,并且本申请由滑行架、伸缩悬臂,推拉组件等组成,结构简单,安装简便,并且只需要通过牵引推拉组件即可推动整个装置进退,伸缩悬臂可以进行高度与角度调节,操作简单,使用十分便利,便于推广。
技术特征:1.一种用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:包括滑行架(1),所述滑行架(1)上方设有伸缩悬臂(2),所述伸缩悬臂(2)转动式设置在滑行架(1)上,其上端设有安装座(3),安装座(3)用于安装探测器。
2.根据权利要求1所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:所述滑行架(1)包括连接框(11),连接框(11)的下方设有多个支撑腿(12),支撑腿(12)的上端和连接框(11)连接,下端连接有滑行轮(13)。
3.根据权利要求2所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:所述支撑腿(12)和连接框(11)的上表面之间具有夹角α,夹角α的大小为30°-45°。
4.根据权利要求2所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:所述连接框(11)包括至少一组安装杆(111),相邻安装杆(111)之间通过连接杆(112)连接,安装杆(111)的端部和支撑腿(12)连接。
5.根据权利要求1所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:所述支撑腿(12)包括支撑腿本体(121),支撑腿本体(121)的上端连接有转接腿(122),转接腿(122)的上端连接有安装板二(123)。
6.根据权利要求5所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:所述支撑腿本体(121)之间设有加强结构(14),加强结构(14)包括一对相互交叉的加强杆(141),各加强杆(141)的端部分别与各支撑腿本体(121)可拆卸连接。
7.根据权利要求6所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:相互交叉的加强杆(141)之间通过连接件(142)可拆卸连接。
8.根据权利要求1所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:所述伸缩悬臂(2)包括臂体(21),臂体(21)上设有旋转座(22),旋转座(22)和连接框(11)可拆卸连接。
9.根据权利要求1所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:所述臂体(21)的下端还可拆卸连接有操作手柄(23)。
10.根据权利要求1所述的用于隧道衬砌质量雷达检测的作业机械臂,其特征在于:所述滑行架(1)下方还连接有推拉组件(4),推拉组件(4)包括连接臂(41),连接臂(41)的两端均与滑行架(1)连接,连接臂(41)下方还设有牵引框(42)。
技术总结本技术公开了一种用于隧道衬砌质量雷达检测的作业机械臂,包括滑行架,所述滑行架上方设有伸缩悬臂,所述伸缩悬臂转动式设置在滑行架上,其上端设有安装座,安装座用于安装探测器。本技术提供的隧道衬砌质量雷达检测的作业机械臂克服了现有检测方式需要人力多、速度慢、存在高空作业安全隐患的不足,并且本申请由滑行架、伸缩悬臂,推拉组件等组成,结构简单,安装简便,并且只需要通过牵引推拉组件即可推动整个装置进退,伸缩悬臂可以进行高度与角度调节,操作简单,使用十分便利,便于推广。技术研发人员:郭晓昌,徐亚楠,漆自强受保护的技术使用者:广东省建设工程质量安全检测总站有限公司技术研发日:20231215技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240726/116754.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表