具有阻尼结构的微机械传感器结构的制作方法
- 国知局
- 2024-07-27 12:56:39
本发明涉及一种具有阻尼结构的微机械传感器结构。
背景技术:
1、为了制造加速度传感器,通常使用mems结构,该mems结构从厚的多晶硅功能层蚀刻出。该多晶硅功能层布置在嵌埋的薄多晶硅层上。该多晶硅层本身与衬底上的氧化层锚定。嵌埋的层在此可以用作印制导线或电极。功能层还可以通过沟槽工艺和氧化牺牲层方法露出。嵌埋的层可以通过氧化物与衬底电分离。印制导线和电极还可以如此宽地设计,使得它们在牺牲性氧化物蚀刻步骤中不完全被下蚀刻并且因此稳定地锚定在衬底上。
2、如此制造的微机械结构大多在进一步的工艺流程中用盖状晶圆密封。根据不同的应用,可以在封闭的体积内包含一个适当的压力。封闭在此可以通过密封件-玻璃-粘合方法或共晶粘合方法,例如使用alge进行。
3、在制造加速度传感器时,通常在功能层中产生独立地可偏转的质量,该质量通过弹簧元件固定在衬底上。为了测量由于外部施加的加速度而引起的独立质量相对于衬底的偏转,通常探测安装在独立质量上的电极面与固定地锚定在衬底上的电极面之间的电容变化。布置在可运动质量上的电极面和固定的电极面之间的距离在此应选择得尽可能小,以便获得大的电容信号和与此相关地获得传感器的高激励灵敏度。
4、传感器对振动的反应通常是不希望的,因此传感器有意识地被阻尼。为此,不但在可偏转质量上而且在衬底上都可以设置彼此嵌接的阻尼梳。如果可偏转质量垂直于阻尼梳的阻尼指的延伸方向运动,则彼此对置的阻尼指之间的距离减小,处于指间的液体被压缩并且从梳被压出。该过程称为所谓的压膜阻尼(squeeze-film-)。与滑膜阻尼(slide-film-)(其中质量平行于阻尼指的延伸方向运动,阻尼指之间的距离保持不变)不同地,压膜阻尼本身以小的梳状结构可以实现非常高的阻尼值。
5、当流体在两个朝向彼此运动的板之间流出时能够实现的阻尼第一近似地与流体的粘度和阻尼指的数量、长度成正比,并且间接与直接对置的指之间的距离的三次方成正比。
6、该行为尤其对于加速度传感器是有利的。一方面,加速度传感器必须非常柔软地悬挂,以便实现高灵敏度。另一方面,在由外部施加过载的情况下,可运动质量不应以太高的速度撞击到固定的结构中并在此损坏该结构。
7、为了防止这种撞击,可以使用并如此设计阻尼指,使得在可运动质量撞击之前不久,在阻尼梳中产生对置的阻尼指之间的非常小的距离,从而可以实现高的阻尼作用。这尤其对于追求非常强阻尼的传感器是有利的。
8、然而,对于优选也针对较高频率应具有测量灵敏度的加速度传感器而言,这种实施方案很难实现,因此对于这些加速度传感器而言,强阻尼是不利的。在增加阻尼指之间的距离,使得在正常运行中仅出现较低的阻尼作用,则也必须增大对置的测量电极之间的距离,以便在质量的强烈偏转情况下继续获得足够的阻尼,并且能够避免质量撞击到不可运动的结构上。然而,这将导致传感器的灵敏度的强烈降低。虽然灵敏度的降低可以通过增大电极面补偿。然而,这将增加可运动质量的质量并且与此相关地增加在质量撞击时的能量,这又将需要更强的阻尼。
技术实现思路
1、因此,本发明的任务是提供一种具有改善的阻尼行为的微机械传感器结构。
2、该任务由独立权利要求的内容来解决。有利的构型是从属权利要求的内容。
3、根据一个方面,提供一种具有阻尼结构的微机械传感器结构,其中,该传感器结构包括:
4、衬底;
5、相对于衬底可弹性偏转的质量;
6、用于探测质量的偏转的测量单元;和
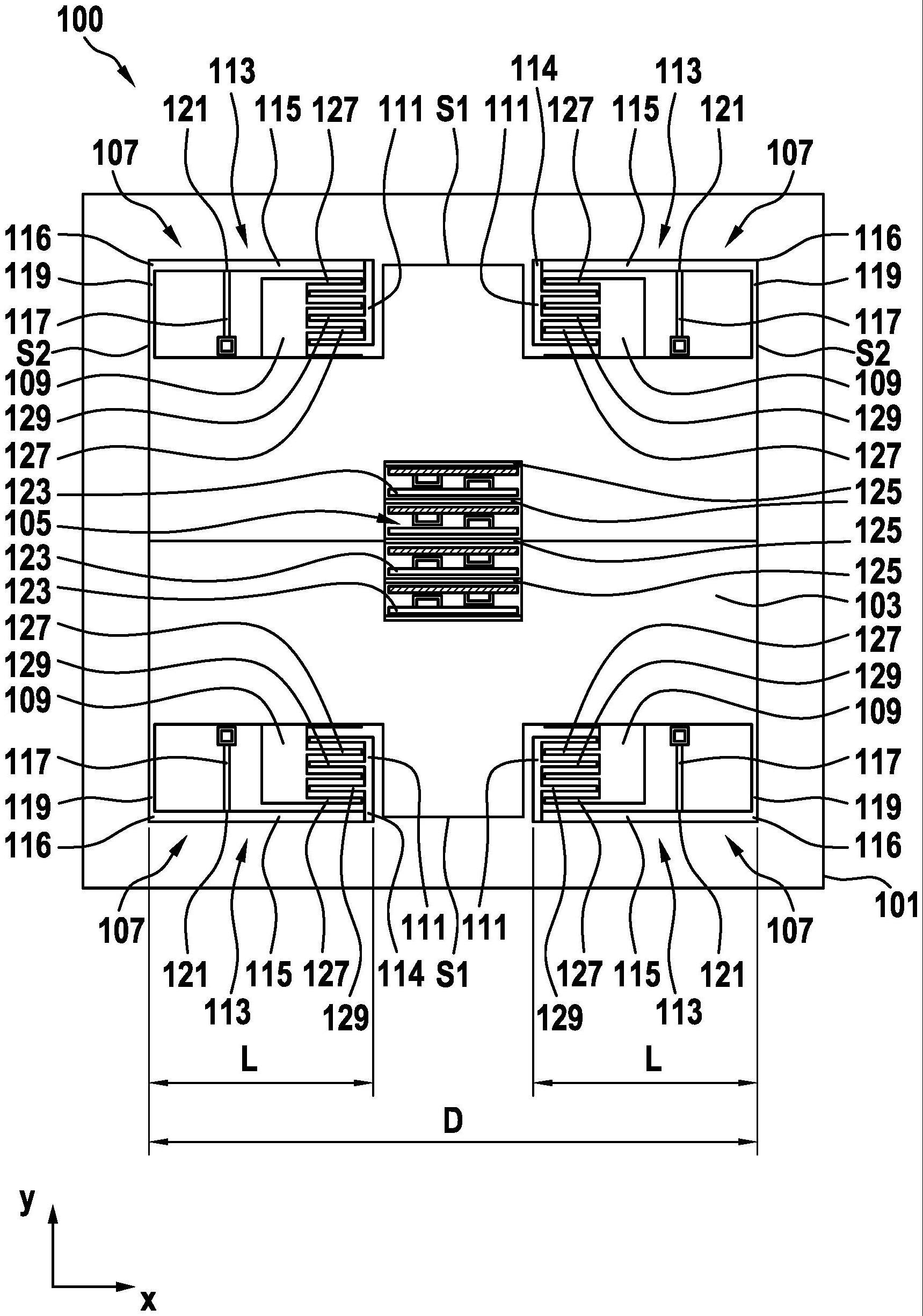
7、阻尼结构,用于以彼此嵌入的第一和第二阻尼梳阻尼质量的偏转,其中,第一阻尼梳布置在质量上,而第二阻尼梳可运动地布置在偏转结构上,并且其中,在质量沿第一方向偏转时,第二阻尼梳通过偏转结构相对于衬底沿与第一方向相反的第二方向运动。
8、由此可以实现以下技术优点:可以提供具有改善的阻尼行为的微机械传感器结构。通过具有第一和第二阻尼梳的阻尼结构,其中第一阻尼梳布置在可偏转质量上,而第二阻尼梳可运动地布置在偏转结构上,可以阻尼由于微机械传感器结构的外部加速度而导致的可偏转质量的偏转。为此,第一和第二阻尼梳以相应的阻尼指彼此嵌入并且是相对彼此可运动的。在可偏转质量沿第一方向偏转时,第二阻尼梳可以通过偏转结构沿与第一方向相反的第二方向运动。由于可偏转质量的偏转,固定在可偏转质量上的第一阻尼梳因此朝第二阻尼梳的方向运动。此外,通过偏转结构,第二阻尼梳朝第一阻尼梳的方向运动。由于第一和第二阻尼梳朝向彼此的运动,第一和第二阻尼梳的相互平行布置并彼此嵌接的阻尼指之间的距离比测量单元的第一和第二测量电极之间的距离以更大的速度减小。
9、由此可以实现,在微机械传感器结构的正常状态下,阻尼结构的第一和第二阻尼梳可以分别以第一和第二阻尼结构的相互平行布置的阻尼指之间的大的距离运行。由此,微机械传感器结构可以在正常状态下以低阻尼运行,使得微机械传感器结构具有高响应行为并且因此能够探测高频加速度。在由于微机械传感器结构过载而导致可偏转质量强烈偏转的情况下,与可偏转质量由于外部加速度而朝向微机械传感器结构的固定的结构运动相比,第一和第二阻尼梳通过偏转结构以更高的速度朝向彼此运动。
10、由此,第一和第二阻尼梳的阻尼指之间的距离比测量单元的第一和第二测量电极之间的距离以更大的速度减小。由此可以实现在由于微机械传感器结构的外部过载而导致可偏转质量强烈加速的情况下,可以在阻尼结构的第一和第二阻尼梳的阻尼指之间产生小的距离,由此实现对可偏转质量的运动的高阻尼。由此可以避免可偏转质量碰撞在微机械传感器结构的固定的结构上。因此,通过微机械传感器结构和尤其偏转结构可以在正常状态下实现低阻尼行为和在微机械传感器结构过载的情况下实现强阻尼行为。由于在过载情况下可能强烈的阻尼行为,测量单元的第一和第二测量电极还能够以相对彼此的小距离实施,由此可以实现微机械传感器结构的高测量灵敏度。
11、根据一个实施方式,偏转结构构造为具有可枢转的杠杆臂的摇臂结构,其中,杠杆臂通过锚定在衬底上的第一弹簧元件可枢转地支承,其中,在杠杆臂的第一端部上布置有第二阻尼梳,并且其中,杠杆臂通过布置在杠杆臂的第二端部上的第二弹簧元件与质量连接。
12、由此可以实现以下技术优点:可以提供技术上尽可能简单构型的偏转结构,该偏转结构设置为用于在可偏转质量偏转时使第二阻尼梳沿与可偏转质量的偏转方向相反的方向运动。
13、根据一个实施方式,微机械传感器结构包括多个阻尼结构。
14、由此可以实现以下技术优点:可以进一步改善微机械传感器结构的阻尼行为。通过多个阻尼结构可以尤其在微机械传感器结构过载的情况下实现由于多个彼此嵌接的阻尼梳而改善的阻尼行为和与此相关的提高的阻尼性能。
15、根据一个实施方式,质量通过偏转结构的第一弹簧元件可弹性偏转地固定在衬底上。
16、由此可以实现以下技术优点:能够实现可偏转质量的简化的悬挂。通过可偏转质量在偏转结构的第一弹簧元件上的支承,可偏转质量与衬底可弹性偏转地连接。因此,不需要另外的弹簧元件用于在衬底上可偏转地支承可偏转质量。
17、根据一个实施方式,阻尼结构的第一弹簧元件在共同的锚定结构中与衬底连接。
18、由此可以实现以下技术优点:可以提供微机械传感器结构的尽可能紧凑的结构形式。此外,通过将多个阻尼结构的多个第一弹簧元件锚定在共同的锚定结构中,可以使各个第一弹簧元件的响应行为同步,使得可以提供多个阻尼结构的均匀的阻尼行为。
19、根据一个实施方式,阻尼结构布置在质量的边缘区域上并且至少部分地包围该质量,和/或,其中,阻尼结构布置在质量的内部区域中并且被该质量至少部分地包围。
20、由此可以实现微机械传感器结构的紧凑的结构形式的技术优点。
21、根据一个实施方式,相邻阻尼结构的第二阻尼梳通过共同的第三弹簧元件相互连接。
22、由此可以实现以下技术优点:可以提供改善的阻尼行为。通过相邻阻尼结构的相邻第二阻尼梳通过第三弹簧元件的连接,可以减小由于偏转结构的偏转和尤其由于摇臂结构的杠杆臂的偏转而导致的第二阻尼梳的运动的旋转分量。由此可以实现第二阻尼梳相对于对应的第一阻尼梳的纯平移运动,使得阻尼结构的各彼此嵌接的第一和第二阻尼梳的阻尼指可以保持继续平行地布置。由此可以使阻尼行为进一步精确化。
23、根据一个实施方式,杠杆臂的在第一弹簧元件和第二弹簧元件之间的第一区段的第一长度大于杠杆臂的在第一弹簧元件和第三弹簧元件之间的第二区段的第二长度的两倍。
24、由此可以实现以下技术优点:可以进一步改善阻尼结构的阻尼特性。由于上述距离,尤其与将相邻第二阻尼梳相互连接的第三弹簧元件结合地,发生由于偏转结构的偏转而导致的第二阻尼梳的尽可能线性的运动。
25、根据一个实施方式,杠杆臂沿着垂直于质量的偏转方向的方向延伸。
26、由此可以实现以下技术优点:能够实现构造为摇臂结构的偏转结构的尽可能精确的响应行为以及在可偏转质量偏转时阻尼结构的与此相关的精确的阻尼行为。
27、根据一个实施方式,杠杆臂的长度大于质量的直径的15%。
28、由此可以实现以下技术优点:能够实现阻尼结构的尽可能软的悬挂。通过阻尼结构的尽可能软的悬挂,可偏转质量的响应行为尤其在小负载的情况下仅被阻尼结构最小化地影响,使得可以实现微机械传感器结构的精确的测量行为。
29、根据一个实施方式,通过悬挂点的定位能够改变阻尼结构的阻尼行为,在所述悬挂点处,杠杆臂与第一弹簧元件连接。
30、由此可以实现以下技术优点:能够可变化地调整阻尼结构的阻尼行为。通过将杠杆臂的悬挂点定位在第一弹簧元件上可以改变杠杆臂的杠杆作用。由此,由于可偏转质量的偏转和阻尼结构的与此相关的阻尼行为而导致构造在杠杆臂上的第二阻尼梳的偏转可以适配于对应微机械传感器结构的特性。
31、根据一个实施方式,测量单元包括至少一个布置在衬底上的第一测量电极和与第一测量电极对置地布置在质量上的第二测量电极,其中,第一和第二阻尼梳具有垂直于质量的偏转方向延伸并平行于第一和第二测量电极布置的第一和第二阻尼指,所述第一和第二阻尼指具有相同的电势。
32、由此可以实现以下技术优点:能够实现阻尼结构的精确的阻尼行为。由于第一和第二阻尼指彼此对置的平行定向,可以通过均匀地改变直接对置的阻尼指之间的距离实现阻尼结构的均匀的阻尼行为。同样情况适用于阻尼指相对于对置布置的第一和第二测量电极的平行布置,所述第一和第二测量电极分别沿垂直于可偏转质量的偏转方向取向的延伸方向布置。通过第一和第二阻尼梳的第一和第二阻尼指的相同电势,可以防止阻尼指之间的静电吸引和因此改善阻尼行为。
33、根据一个实施方式,在质量的静止位置中,直接对置的第一和第二阻尼指之间的距离大于直接对置的第一和第二测量电极之间的距离。
34、由此可以实现以下技术优点:在微机械传感器结构的正常状态下,即在可偏转质量的小偏转的情况下,由于直接对置的第一和第二阻尼指的大的距离,能够实现阻尼结构的低阻尼作用。由此能够实现微机械传感器结构的对高频加速度的高响应行为或高测量精度和灵敏度。通过偏转结构的上述作用,在可偏转质量强烈偏转的情况下,对置的第一和第二阻尼指的距离可以比直接对置的第一和第二测量电极之间的距离以更大的速度减小,使得在可偏转质量由于外部作用的过载而导致强烈偏转的情况下,由于直接对置的第一和第二阻尼指之间的小距离能够实现强烈的阻尼作用。
35、根据一个实施方式,质量通过至少一个悬挂弹簧元件可弹性偏转地固定在衬底上。
36、由此可以实现以下技术优点:可以提供可偏转质量在衬底上的改善的可弹性偏转的固定。
37、根据一个实施方式,微机械传感器结构构造为加速度传感器或角速度传感器或微镜。
38、由此可以实现以下技术优点:可以提供具有上述优点的微机械传感器结构的尽可能广泛的应用领域。
本文地址:https://www.jishuxx.com/zhuanli/20240726/124277.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表