一种具有多模态运动的磁驱动管状微纳马达及其制备方法
- 国知局
- 2024-07-27 13:06:31
本发明属于微纳米器件,具体涉及具有多模态运动的磁驱动管状微纳马达。
背景技术:
1、磁驱动微纳马达因其尺寸小、能够在穿透深度高且安全无损伤的低操控磁场作用下产生定向位移,在靶向输运、诊疗等生物医学领域具有潜在的应用前景。在诸如人体脉管等生物组织环境,其内表面是由具有一定高度的内皮细胞组成的不规则表面。不规则表面的存在阻碍了磁驱动微纳马达的运动和任务的达成。为提高微纳马达对工作环境的适应性和任务达成的灵活性,途径之一就是赋予微纳马达多模态的运动能力。目前,多模态磁驱动微纳马达的制备多通过磁矩的编辑或者预磁化的方式赋予微纳马达不同的变形运动或者运动方式。其中,通过预先磁化纳米磁性薄膜层使得螺旋管状微结构获得不同的运动方式,但该方法只能使一种预磁化方向对应一种运动模态;基于纳米磁体编辑方法,用外磁场与磁矩的相互作用而获得不同变形运动,该方法虽然达到不同变形运动效果,但制备工艺长且复杂。
2、另外,通过负载特定催化剂的方式虽然能够使管状马达产生运动,但在多模态运动能力方面还是欠缺的。例如,中国发明专利cn109576986a、cn110038518a、cn115487864a和cn115634714a等公布了的管状微纳马达是利用催化剂氧化锰或者二氧化锰来催化环境溶液中的双氧水而产生气泡来推动马达的自主运动,但是管状马达没有表现出多模态运动的特征。
技术实现思路
1、本发明的目的在于提供一种具有多模态运动的磁驱动微纳马达,以增强微纳马达适应性和完成任务的灵活性,并使微纳马达能基于该运动模态转变特征达到克服微观障碍物,具有无接触捕获、运输和释放微纳货物的能力。
2、本发明提供的具有多模态运动的磁驱动管状微纳马达,在低雷诺数(re<<1)和外部旋转磁场(≤10mt)驱动下可实现多种运动模态的转变。
3、该磁驱动管状微纳马达,其结构为:是利用预应变的包含有磁性层的纳米多层膜经自卷曲而成的微米中空结构;所述纳米多层膜的总厚度不大于200nm,其中的磁性层厚度不大于60nm;中空部分直径为10vm~70μm,长度为10μm~200μm;磁性层为nixfe1-x(x=0.81~1);
4、构成微纳米马达的纳米多层膜的结构为:
5、ag/应力层/磁性层/覆盖层,或者为ag/应力层/磁性层;其中,应力层为si或sio等,覆盖层为sio2;或者为:
6、牺牲层/应力层1/黏附层/磁性层/应力层2;其中,牺牲层为ge,应力层1为sio,黏附层为ti,应力层2为sio2。
7、管状微纳马达中,磁性层(平面)可设计长方形或圆形磁性图案,或其组合;根据管状马达的磁性图案的不同,在外部磁场的驱动下具有不同的运动模态,其中,长方形磁性图案的长度为40μm~80μm,宽度为5μm~30μm,圆形图案的直径为5μm~40μm。
8、本发明中,管状微纳马达可相互组装分离运动,根据管状微纳马达的磁性图案、磁性材料的不同,管状微纳马达的组装策略、运动模态不同。
9、本发明中,对管状微纳马达的操控方法为:上产生机械运动与运动模态转变;通过调节旋转磁场的频率,此管状微纳马达可以翻越障碍物及无接触地输运微纳货物,同时展现丰富的自组装特征。
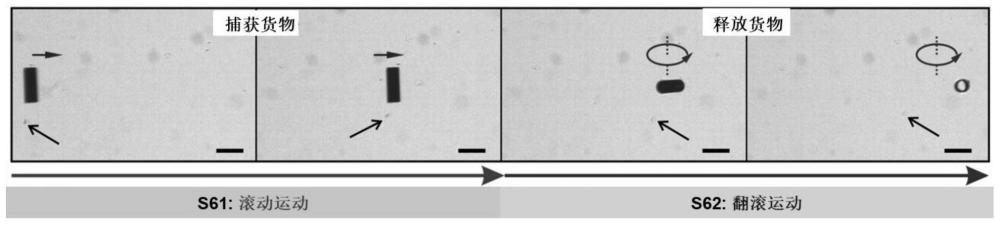
10、在旋转磁场的驱动下、在液体环境中,管状微纳马达在衬底表面上产生机械运动与运动模态转变;包括以滚动运动或者翻滚运动产生净位移。具体可利用三维亥姆霍兹磁场发生装置对衬底上的管状微纳马达进行远程操控;
11、操控该微纳马达的旋转磁场强度不高于10mt,液体的动力粘滞系数不高于6.1mpa·s。
12、操控磁场的频率发生变化时,该管状微纳马达在衬底上的运动模态会发生转变,且能够翻越与其高度相似的障碍物。
13、微纳马达由滚动运动转变为翻滚运动时可释放已捕获的微纳货物。
14、微纳马达捕获、运输和释放微纳货物的过程中与货物没有直接的接触。
15、所述衬底可为玻璃或者聚甲基丙烯酸甲酯(pmma)等。
16、本发明提供的具有多模态运动的磁驱动管状微纳马达的制备方法,具体步骤如下:
17、(1)在干净的玻璃或硅衬底上,利用微纳加工工艺制备具有一定形状的、含有磁性层图案的预应变纳米多层膜;
18、(2)利用液滴插层法或者牺牲层法,使纳米多层膜发生自卷曲并形成管状微纳马达;
19、(3)完成卷曲后的管状微纳马达,通过毛细管与管状微纳结构之间的微弱的静电吸附力来进行转移和释放到具有衬底的液体环境中;
20、(4)利用三维亥姆霍兹磁场发生装置对衬底上的管状微纳马达进行远程操控;
21、(5)将聚苯乙烯微球模拟微纳货物、微纳尺度的台阶模拟障碍物,操控管状微纳马达对微纳货物的运输及障碍物的翻越。
22、优选地,步骤(1)中,磁性层的成分为nixfe1-x(x=0.81~1.0)合金,厚度为20nm~60nm,平面磁性层的形状矩形或圆形。
23、优选地,步骤(2)中,若采用液滴插层法,纳米多层膜结构为ag/应力层/nixfe1-x/覆盖层或者ag/应力层/nixfe1-x,其中应力层可为si或sio等,覆盖层为sio2。
24、优选地,步骤(2)中,若采用牺牲层法,纳米多层膜的结构为牺牲层/应力层/黏附层/nixfe1-x/覆盖层,其中牺牲层为ge,应力层为sio,黏附层为ti,覆盖层为sio2。
25、优选地,步骤(3)中,液体的动力粘滞系数为0.9mpa·s~6.1mpa·s,衬底为玻璃衬底或者聚甲基丙烯酸甲酯衬底。
26、优选地,步骤(4)中,三维亥姆霍兹磁场发生装置产生的磁场强度不高于10mt,磁场频率不高于100hz。
27、优选地,步骤(5)中,聚苯乙烯微球的直径范围为5μm~50μm,障碍物的高度为50μm~200μm。
28、本发明与现有产品相比,具有以下有益效果:
29、(1)单个管状微纳马达在外部旋转磁场的操控下,能够表现出多种运动模态,丰富了单个管状微纳马达的运动方式。
30、(2)多个管状马达在外部旋转磁场的操控下,能够表现出多种组装策略和运动模态,丰富了多管状微纳马达的操控方案。
31、(3)多模态磁驱动管状微纳马达制备方式更为简单。
32、(4)基于运动模态转变的特征,可以实现微纳尺度障碍物翻越以及无接触微纳货物捕获、运输和释放,针对充满褶皱的脉管环境以及货物输运提供了新的策略。
技术特征:1.一种具有多模态运动的磁驱动管状微纳马达,其特征在于,在低雷诺数和外部磁场驱动下实现多种运动模态的转变;其结构为:利用预应变的包含有磁性层的纳米多层膜经自卷曲而成的微米中空结构;所述纳米多层膜的总厚度不大于200nm,其中的磁性层厚度不大于60nm;中空部分直径为10vm~70μm,长度为10μm~200μm;磁性层为nixfe1-x,x=0.81~1。
2.根据权利要求1所述的磁驱动管状微纳马达,其特征在于,构成微纳米马达的纳米多层膜的结构为:
3.根据权利要求1所述的磁驱动管状微纳马达,其特征在于,所述磁性层为长方形或圆形磁性图案,或其组合;根据管状马达的磁性图案的不同,在外部磁场的驱动下具有不同的运动模态;其中,长方形磁性图案的长度为40μm~80μm,宽度为5μm~30μm;圆形图案的直径为5μm~40μm。
4.根据权利要求1所述的磁驱动管状微纳马达,其特征在于,管状微纳马达可相互组装分离运动,根据管状微纳马达的磁性图案、磁性材料的不同,管状微纳马达的组装策略、运动模态不同。
5.如权利要求1-4之一所述磁驱动管状微纳马达的操控方法,其特征在于,在操控磁场的驱动下、在液体环境中,微纳马达在衬底表面上产生机械运动与运动模态转变;包括以滚动运动或者翻滚运动产生净位移。
6.根据权利要求5所述的磁驱动管状微纳马达的操控方法,其特征在于,所述磁场强度不高于10mt,液体的动力粘滞系数不高于6.1mpa·s。
7.根据权利要求6所述的磁驱动管状微纳马达的操控方法,其特征在于,操控磁场的频率发生变化时,该管状微纳马达在衬底上的运动模态会发生转变,且能够翻越与其高度相似的障碍物。
8.根据权利要求7所述的磁驱动管状微纳马达的操控方法,其特征在于,微纳马达由滚动运动转变为翻滚运动时可释放已捕获的微纳货物。
9.根据权利要求8所述的磁驱动管状微纳马达的操控方法,其特征在于,微纳马达捕获、运输和释放微纳货物的过程中不与货物直接接触。
10.如权利要求1-4之一所述磁驱动管状微纳马达的制备方法,其特征在于,具体步骤如下:
技术总结本发明属于微纳米器件技术领域,具体为一种具有多模态运动的磁驱动管状微纳马达及其制备方法。本发明的微纳马达是利用预应变的包含有磁性层的纳米多层膜经自卷曲而成的微米中空结构;纳米多层膜的总厚度不大于200nm,磁性层厚度不大于60nm;该微纳马达在低雷诺数液体环境和外部旋转磁场驱动下,能够在衬底上产生机械运动与运动模态转变;通过调节旋转磁场的频率,微纳马达可以翻越障碍物及无接触地输运微纳货物,同时展现丰富的自组装特征。本发明提供的多模态、适应性运动的磁驱动管状微纳马达,可在低雷诺数环境中进行微纳货物的无接触输运及自组装。技术研发人员:颜光辉,梁依凡,崔继斋受保护的技术使用者:复旦大学义乌研究院技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240726/124957.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表