一种固体火箭推力矢量控制系统及方法与流程
- 国知局
- 2024-07-27 13:55:10
本发明涉及固体火箭推力矢量控制,特别是涉及一种固体火箭推力矢量控制系统及方法。
背景技术:
1、固体火箭推力矢量控制技术可以极大的提高飞行器的机动性和突防能力,使飞行器能够执行更复杂的任务和打击能力。推力矢量控制是由作动器的直线运动来驱动喷管摆动相应的角度。为了提高飞行器的机动性,推力矢量调节要求直线作动器具有极高的快速响应。机-电一体化作动器具有质量轻、清洁、安全、易于维护和能源利用率高等特点。随着对推力矢量系统技术的研究,电力电子技术的进步,机-电一体化作动器的技术已逐渐成熟。现有技术中无法实现对固体火箭发动机的姿态控制。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的在于提供一种固体火箭推力矢量控制系统及方法,本发明能够实现对固体火箭发动机的姿态控制。
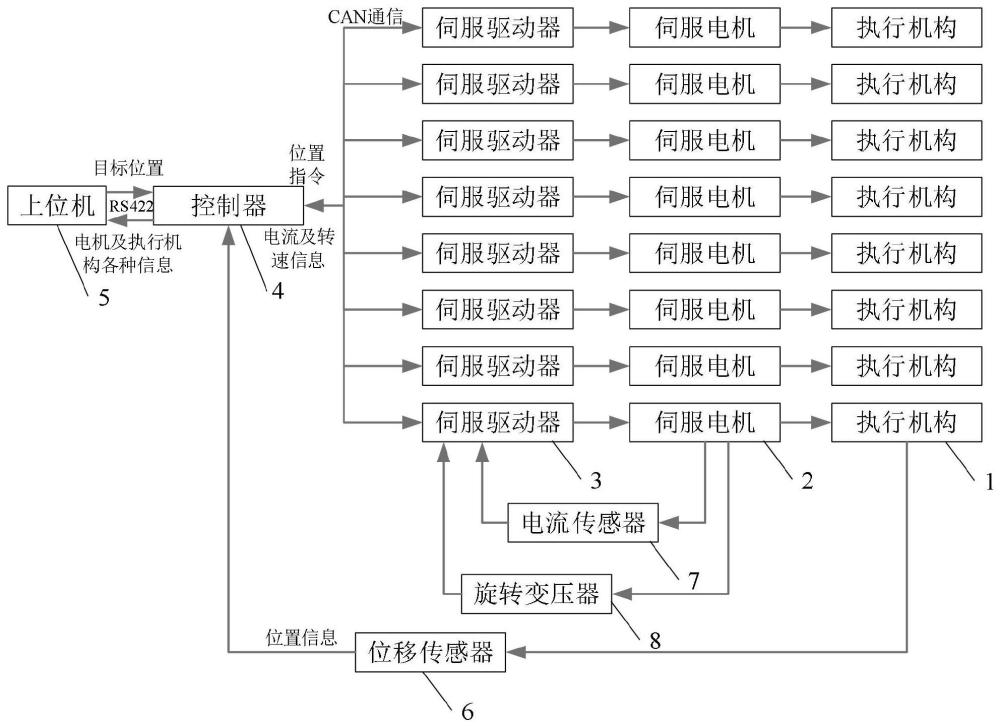
2、为实现上述目的及其他相关目的,本发明提供一种固体火箭推力矢量控制系统,包括:
3、多个执行机构;
4、多个伺服电机,用于驱动所述执行机构,每个所述伺服电机的输出端分别与每个所述执行机构的输入端相连;
5、伺服驱动器,用于驱动所述伺服电机,每个所述伺服驱动器的输出端分别与每个所述伺服电机的输入端相连;
6、控制器,其与多个所述伺服驱动器之间双向通信连接;
7、上位机,其与所述控制器之间双向通信连接。
8、在本发明的一实施例中,还包括位移传感器,用于检测所述执行机构的位移运行参数,所述位移传感器的输入端与所述执行机构的输出端相连,所述位移传感器的输出端与所述控制器的输入端相连。
9、在本发明的一实施例中,还包括电流传感器,用于检测所述伺服电机的电流信号,所述电流传感器的输入端与所述伺服电机的输出端相连,所述电流传感器的输出端与所述伺服驱动器的输入端相连。
10、在本发明的一实施例中,还包括旋转变压器,用于检测所述伺服电机的速度信号,所述旋转变压器的输入端与所述伺服电机的输出端相连,所述旋转变压器的输出端与所述伺服驱动器的输入端相连。
11、在本发明的一实施例中,所述电流传感器、旋转变压器分别用于对所述伺服驱动器进行闭环控制。
12、在本发明的一实施例中,所述控制器通过rs422总线与所述上位机之间双向通信连接。
13、在本发明的一实施例中,所述控制器通过can总线与多个所述伺服驱动器之间双向通信连接。
14、在本发明的一实施例中,所述执行机构、伺服电机、伺服驱动器的个数为8个。
15、本发明还提供一种固体火箭推力矢量控制方法,包括:
16、s1、上位机下发多个伺服电机和执行机构的位置指令至控制器;
17、s2、所述控制器解析并得到所述位置指令,并将所述位置指令发送至所述伺服驱动器;
18、s3、所述伺服驱动器接收到所述位置指令后,根据电流传感器和旋转变压器反馈的电流信号和速度信号,与预设的电流信号和速度信号进行对比,输出pwm控制信号至所述伺服电机,并将所述伺服电机的电流信号和速度信号发送至所述控制器;
19、s4、根据所述pwm控制信号,伺服电机进行运转,带到后端的执行机构进行作动;
20、s5、安装在执行机构末端的位移传感器采集位移信息,将位移信息传输至所述控制器;
21、s6、所述控制器将接收到的各个执行机构和各个伺服电机的信息整理打包发送至上位机;
22、s7、上位机显示固体火箭推力矢量控制系统的位置、转速、电流的信息,并根据新的控制需求,下发新指令至控制器。
23、在本发明的一实施例中,所述伺服驱动器通过svpwm控制算法输出pwm控制信号至所述伺服电机。
24、如上所述,本发明的一种固体火箭推力矢量控制系统及方法,具有以下有益效果:
25、(1)本发明的固体火箭推力矢量控制系统包括多个执行机构、多个伺服电机、伺服驱动器、控制器、上位机,本发明能够实现对固体火箭发动机的姿态控制。
26、(2)本发明的固体火箭推力矢量控制系统的电流传感器和旋转变压器采集电机的电流及转速发送至伺服驱动器,能够实现电流环及速度环的闭环控制。
27、(3)本发明的固体火箭推力矢量控制系统的位移传感器采集执行机构的位移信息,反馈至控制器,控制器根据反馈的位移与预设的参数信息进行对比,并根据对比结果发出相应的指令,实现位置环的闭环控制。
技术特征:1.一种固体火箭推力矢量控制系统,其特征在于,包括:
2.根据权利要求1所述的一种固体火箭推力矢量控制系统,其特征在于:还包括位移传感器(6),用于检测所述执行机构(1)的位移运行参数,所述位移传感器(6)的输入端与所述执行机构(1)的输出端相连,所述位移传感器(6)的输出端与所述控制器(4)的输入端相连。
3.根据权利要求1所述的一种固体火箭推力矢量控制系统,其特征在于:还包括电流传感器(7),用于检测所述伺服电机(2)的电流信号,所述电流传感器(7)的输入端与所述伺服电机(2)的输出端相连,所述电流传感器(7)的输出端与所述伺服驱动器(3)的输入端相连。
4.根据权利要求3所述的一种固体火箭推力矢量控制系统,其特征在于:还包括旋转变压器(8),用于检测所述伺服电机(2)的速度信号,所述旋转变压器(8)的输入端与所述伺服电机(2)的输出端相连,所述旋转变压器(8)的输出端与所述伺服驱动器(3)的输入端相连。
5.根据权利要求4所述的一种固体火箭推力矢量控制系统,其特征在于:所述电流传感器(7)、旋转变压器(8)分别用于对所述伺服驱动器(3)进行闭环控制。
6.根据权利要求1所述的一种固体火箭推力矢量控制系统,其特征在于:所述控制器(4)通过rs422总线与所述上位机(5)之间双向通信连接。
7.根据权利要求1所述的一种固体火箭推力矢量控制系统,其特征在于:所述控制器(4)通过can总线与多个所述伺服驱动器(3)之间双向通信连接。
8.根据权利要求1所述的一种固体火箭推力矢量控制系统,其特征在于:所述执行机构(1)、伺服电机(2)、伺服驱动器(3)的个数为8个。
9.一种固体火箭推力矢量控制方法,其特征在于,包括:
10.根据权利要求9所述的一种固体火箭推力矢量控制方法,其特征在于:所述伺服驱动器(3)通过svpwm控制算法输出pwm控制信号至所述伺服电机(2)。
技术总结本发明涉及固体火箭推力矢量控制技术领域,特别是涉及一种固体火箭推力矢量控制系统及方法。包括多个执行机构、多个伺服电机、伺服驱动器、控制器、上位机,多个伺服电机用于驱动所述执行机构,每个所述伺服电机的输出端分别与每个所述执行机构的输入端相连;伺服驱动器用于驱动所述伺服电机,每个所述伺服驱动器的输出端分别与每个所述伺服电机的输入端相连;控制器与多个所述伺服驱动器之间双向通信连接;上位机与所述控制器之间双向通信连接。本发明能够实现对固体火箭发动机的姿态控制。本发明能够实现电流环及速度环的闭环控制以及实现位置环的闭环控制。技术研发人员:李永亮,李炜,马国轩,党冰洋,康希锐,马勇,黎明诚,吴阳,张世平,和延受保护的技术使用者:陕西电器研究所技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240726/128166.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表