一种风力发电机组在低风时的控制方法、系统及其存储介质与流程
- 国知局
- 2024-07-27 14:01:49
本发明涉及风力发电控制领域,尤其涉及风力发电机组在低风时的控制方法、系统及其存储介质。
背景技术:
1、风力发电机组在实际运行过程中,由于风电场风速低到一定程度时,往往需要对风力发电机组作停机处理或者进行负功率运行。当作停机动作后,如遇风速增到一定程度时则需要再次启动风力发电机组以便风力发电机组正常运行;而当风力发电机组进行负功率运行时需要消耗风力发电机组本身储备的电能,以维持风力发电机组的正常运行。
2、然而,在风速低到一定程度时,风力发电机组如进行停机动作,再次启动,需要长时间等待,往往造成风能不能被充分利用风能;而如风力发电机组进行负功率运行,也会造成自身能量的消耗,消耗的能量往往需要风力发电机组再次正常运行再进行有效的补充。
技术实现思路
1、本发明的目的是针对上述背景技术存在的缺陷,提供一种提高风力发电机组在低风状况下的机组利用率,避免反复启停机风力发电机组在低风时的控制方法、系统及其存储介质。
2、为实现上述目的,本发明一种风力发电机组在低风时的控制方法,该方法包括低风切出控制、低风空转运行控制及低风并网控制,
3、所述低风空转运行控制进一步包括,
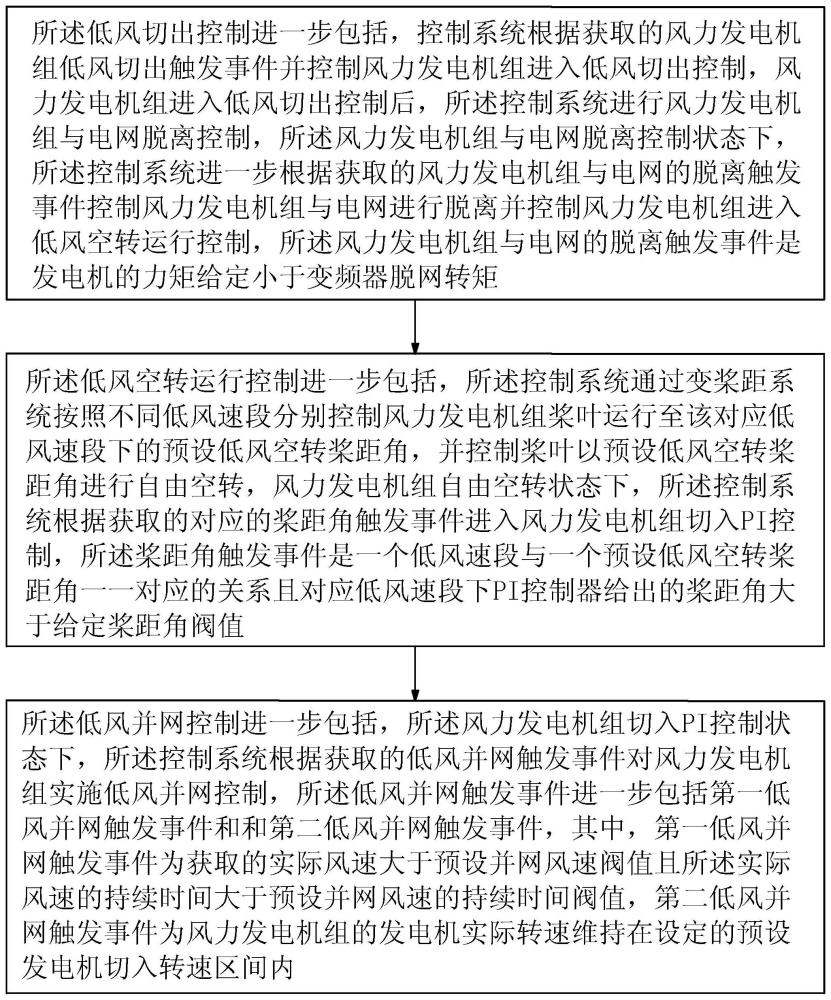
4、所述控制系统通过变桨距系统按照不同低风速段分别控制风力发电机组桨叶运行至该对应低风速段下的预设低风空转桨距角βd,并控制桨叶以预设低风空转桨距角βd进行自由空转,风力发电机组自由空转状态下,所述控制系统根据获取的对应的桨距角触发事件进入风力发电机组切入pi控制,所述桨距角触发事件是一个低风速段与一个预设低风空转桨距角βd一一对应的关系且对应低风速段下pi控制器给出的桨距角大于给定桨距角阀值;
5、所述低风并网控制进一步包括,
6、所述风力发电机组切入pi控制状态下,所述控制系统根据获取的低风并网触发事件对风力发电机组实施低风并网控制,所述低风并网触发事件进一步包括第一低风并网触发事件和第二低风并网触发事件,其中,第一低风并网触发事件为获取的实际风速大于预设并网风速阀值且所述实际风速的持续时间大于预设并网风速的持续时间阀值,第二低风并网触发事件为风力发电机组的发电机实际转速ns维持在设定的预设发电机切入转速区间内,该预设发电机切入转速区间的其中一个端点取值为预设发电机切入转速值与预设发电机切入转速裕量的差值、另一个端点取值为预设发电机切入转速值与预设发电机切入转速裕量的和值。
7、进一步地,一个完整的低风速段至少被分割为两个或者两个以上的不同低风速段。
8、进一步地,所述低风空转运行控制状态下,若控制系统未获取对应的桨距角触发事件,则持续控制桨叶以低风空转收桨速率收桨至预设低风空转桨距角βd并以预设低风空转桨距角βd进行自由空转,具体地,所述pi控制器给出的桨距角小于所述给定桨距角阀值时,所述控制系统控制桨叶以低风空转收桨速率收桨至预设低风空转桨距角并以预设低风空转桨距角进行自由空转。
9、进一步地,所述低风空转收桨速率是以固定收桨速率收桨至预设低风空转桨距角βd或者是以可变收桨速率收桨至预设低风空转桨距角βd。
10、进一步地,所述低风并网控制状态下,若所述控制系统未获取低风并网触发事件,则控制系统进一步根据发电机实际转速ns和预设发电机脱网转速nt之间的大小关系进行判断,并根据判断结果控制风力发电机组进入风力发电机组切入pi控制或自由空转状态。
11、进一步地,若发电机实际转速ns大于预设发电机脱网转速nt,则控制系统对风力发电机组实施所述风力发电机组切入pi控制;若所述发电机实际转速ns小于预设发电机脱网转速nt,则控制系统控制桨叶以低风空转收桨速率收桨至预设低风空转桨距角βd并以预设低风空转桨距角βd进行自由空转。
12、进一步地,风力发电机组的发电机预设发电机脱网转速nt应小于风力发电机组设定的预设发电机切入转速区间内的任意一个取值。
13、本发明之二的一种风力发电机组控制系统,
14、处理器,适用于实现本发明之一所述风力发电机组在低风时的控制方法中的一条或多条计算机程序;以及
15、计算机存储介质,所述计算机存储介质存储有一条或多条计算机程序,所述一条或多条计算机程序适于由所述处理器加载并执行如本发明之一所述风力发电机组在低风时的控制方法。
16、本发明之三的一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,用于执行如本发明之一所述风力发电机组在低风时的控制方法。
17、综上所述,本发明一种风力发电机组在低风时的控制方法、系统及其存储介质的优点如下:提高风力发电机组在低风状况下的机组利用率,避免再启机时的长时间等待、反复的启停机和风力发电机组反复脱并网对电网造成的冲击及负功率运行时的功率消耗。
技术特征:1.一种风力发电机组在低风时的控制方法,包括低风切出控制、低风空转运行控制及低风并网控制,其特征在于,
2.根据权利要求1所述的一种风力发电机组在低风时的控制方法,其特征在于:一个完整的低风速段至少被分割为两个或者两个以上的不同低风速段。
3.根据权利要求1或者2所述的一种风力发电机组在低风时的控制方法,其特征在于:所述低风空转运行控制状态下,若控制系统未获取对应的桨距角触发事件,则持续控制桨叶以低风空转收桨速率收桨至预设低风空转桨距角βd并以预设低风空转桨距角βd进行自由空转,具体地,所述pi控制器给出的桨距角小于所述给定桨距角阀值时,所述控制系统控制桨叶以低风空转收桨速率收桨至预设低风空转桨距角并以预设低风空转桨距角进行自由空转。
4.根据权利要求3所述的一种风力发电机组在低风时的控制方法,其特征在于:所述低空转风收桨速率是以固定收桨速率收桨至预设低风空转桨距角βd或者是以可变收桨速率收桨至预设低风空转桨距角βd。
5.根据权利要求3所述的一种风力发电机组在低风时的控制方法,其特征在于:所述低风并网控制状态下,若所述控制系统未获取低风并网触发事件,则控制系统进一步根据发电机实际转速ns和预设发电机脱网转速nt之间的大小关系进行判断,并根据判断结果控制风力发电机组进入风力发电机组切入pi控制或自由空转状态。
6.根据权利要求5所述的一种风力发电机组在低风时的控制方法,其特征在于:若发电机实际转速ns大于预设发电机脱网转速nt,则控制系统对风力发电机组实施所述风力发电机组切入pi控制;若所述发电机实际转速ns小于预设发电机脱网转速nt,则控制系统控制桨叶以低风空转收桨速率收桨至预设低风空转桨距角βd并以预设低风空转桨距角βd进行自由空转。
7.根据权利要求5所述的一种风力发电机组在低风时的控制方法,其特征在于:风力发电机组的发电机预设发电机脱网转速nt应小于风力发电机组设定的预设发电机切入转速区间内的任意一个取值。
8.一种风力发电机组控制系统,其特征在于,
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,用于执行如权利要求1至7任意一项所述的风力发电机组在低风时的控制方法。
技术总结本发明一种风力发电机组在低风时的控制方法、系统及其存储介质运用了将低风速段进行细分而分成不同的低风速段,且在不同的低风速段空转运行时按照不同的桨叶桨距角进行低风空转运行,进而可以在低风速段更好地对风力发电机组精细化的控制,其有效地解决了风力发电机组在低风情况下风力发电机组的并网控制,进一步降低了风力发电机组在低风段的反复脱网与并网控制。技术研发人员:冯鹏华,彭炜,林金瑞受保护的技术使用者:哈电风能(福建)有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240726/128517.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。