一种基于双臂协作的砌筑机器及砌筑方法、系统
- 国知局
- 2024-07-29 10:05:45
本发明涉及砌筑机器人,尤其涉及一种基于双臂协作的砌筑机器及砌筑方法、系统。
背景技术:
1、焦炉是一种复杂的工业炉窑,由蓄热室、斜道区、燃烧室、炭化室、炉顶区等多个区域组成。每个区域的结构都以层为单位进行设计和施工,总共约有100层。这些区域主要由耐火砖如硅砖和粘土砖等材料砌筑而成。耐火材料总重约为3万吨,规格型号近七百种,其中最重的单个砖块重达70kg。因此,砌筑焦炉的工人劳动强度极大。使用机械臂砌筑能大大缩短工期,早日投产,从而产生巨大的经济效益。
2、但是,现有的砌筑机器人通常采用单臂操作,单臂操作在砌筑过程中需要频繁地切换位置,效率低下,尤其是在砌筑复杂结构或曲面时存在局限性,无法实现高效的协同砌筑;同时传统砌筑机器人的运动轨迹规划较为简单,无法充分优化机器人的运动轨迹,砌筑质量难以保证。
3、因此寻找一种既能高效砌筑的同时,还能提高砌筑质量的砌筑机器是本领域技术人员亟待解决的技术问题。
技术实现思路
1、有鉴于此,本发明提出了一种于双臂协作的砌筑机器及砌筑方法、系统,其使用第一机械臂夹取待砌筑耐火砖,利用第二机械臂对待砌筑耐火砖进行泥浆喷涂,通过第一机械臂与第二机械臂协同作用进行砌筑涂泥,提高砌筑的工作效率。
2、本发明的技术方案是这样实现的:
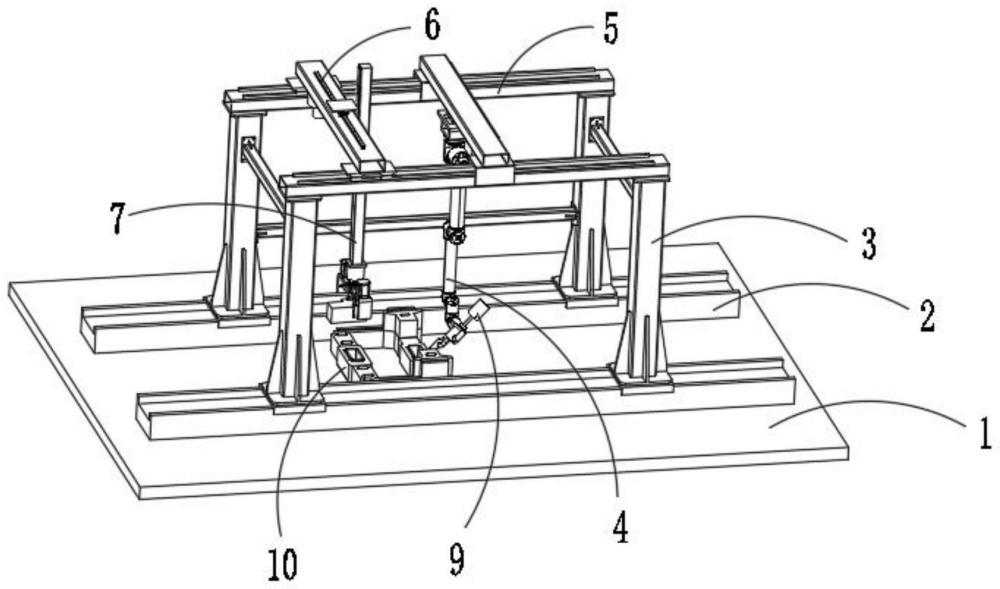
3、第一方面,本发明提供了一种基于双臂协作的砌筑机器,包括支撑架、第一机械臂、第二机械臂和控制器,所述支撑架分别与第一机械臂和第二机械臂的第一端滑动连接,其中,
4、所述第一机械臂包括夹取装置、第一深度相机和第一驱动装置,所述夹取装置位于第一机械臂的第二端,用于夹取待砌筑耐火砖;所述第一深度相机位于夹持装置靠近地面的一侧,用于确定待砌筑耐火砖的信息;所述第一驱动装置位于夹持装置的顶部与夹持装置传动连接,用于驱动夹持装置夹取待砌筑耐火砖;
5、所述第二机械臂包括耐火泥浆喷涂枪头、第二深度相机和第二驱动装置,所述耐火泥浆喷涂枪头位于第二机械臂的第二端,用于给待砌筑耐火砖喷涂泥浆;所述第二深度相机位于活动端的一侧,用于识别待砌筑耐火砖泥浆喷涂的位置;所述第二驱动装置位于第二机械臂上,用于驱动泥浆喷涂装置对待砌筑耐火砖进行喷涂;
6、所述控制器与第一驱动装置和第二驱动装置连接,用于控制第一驱动装置和第二驱动装置协同工作。
7、在以上技术方案的基础上,优选的,所述支撑架包括龙门支撑桁架、两个龙门横梁和两个移动横梁,其中,
8、所述两个龙门横梁位于龙门支撑桁架远离地面的一端,且与龙门支撑桁架连接;
9、两个所述移动横梁的两端分别与两个龙门横梁滑动连接,所述第一机械臂的第一端和第二机械臂的第一端分别与两个移动横梁滑动连接。
10、第二方面,本发明提供了一种基于双臂协作的砌筑方法,应用于如上述所述的砌筑机器,包括以下步骤:
11、s1、根据标准dh参数建立第二机械臂的dh模型,并对第二机械臂的dh模型进行求解,得到第二机械臂的喷涂空间;
12、s2、搭建双机械臂协作加工基础平台,对第一深度相机进行外参标定,得到第一深度相机相对于第一机械臂的位姿,并生成第一机械臂的初始夹取轨迹;
13、s3、使用第二深度相机确定第二机械臂的当前位姿,根据第二机械臂的当前位姿对第二机械臂进行喷涂路径避障规划,得到第二机械臂的初始喷涂路径;
14、s4、对第一机械臂的初始夹取轨迹和第二机械臂的初始喷涂路径进行优化,得到最终夹取-砌筑轨迹和最终喷涂路径,第一机械臂和第二机械臂分别按照最终夹取-砌筑轨迹和最终喷涂路径进行砌筑和泥浆喷涂。
15、在以上技术方案的基础上,优选的,步骤s3具体包括:
16、s31、根据第一深度相机识别出的待砌筑耐火砖的型号;
17、s32、根据第二机械臂的喷涂空间构建第二机械臂的活动地图;
18、s33、根据待砌筑耐火砖的型号确定第二机械臂的喷涂起始位姿和喷涂结束位姿;
19、s34、根据喷涂起始位姿和喷涂结束位姿规划出第二机械臂的移动路径;
20、s35、将所述活动地图与第二机械臂的移动路径进行碰撞测试,得到第二机械臂的初始喷涂路径;所述碰撞测试为判断活动地图中障碍物与第二机械臂的移动路径是否相交。
21、在以上技术方案的基础上,优选的,步骤s34具体包括:
22、将喷涂起始位姿作为起始点,将喷涂结束位姿作为目标点;
23、从起始点和目标点分别进行双向采样扩展,不断生成新节点;
24、交替连接起始点和目标点生成的新节点,直至两个新节点之间的距离在第一阈值内;
25、则两个新节点的路径为第二机械臂的移动路径。
26、在以上技术方案的基础上,优选的,步骤s35还包括:
27、计算第二机械臂与活动地图中障碍物的距离drep;
28、计算第二机械臂的耐火泥浆喷涂枪头与障碍物的夹角;
29、当第二机械臂与活动地图中障碍物的距离drep小于第二阈值时,则产生相斥力,得到第二机械臂关节的排斥速度;
30、将第二机械臂的耐火泥浆喷涂枪头与障碍物的夹角的余弦值和第二机械臂关节的排斥速度以及排斥因素相乘,得到第二机械臂与障碍物协同作用的排斥速度;
31、根据第二机械臂与障碍物协同作用的排斥速度确定第二机械臂的初始喷涂路径。
32、更进一步优选的,步骤s2具体包括:
33、利用第一深度相机和第二深度相机分别计算出第一机械臂和第二机械臂相对于标定板的相对位姿关系;所述标定板为基础平台上任一位置的平面板;
34、根据第一深度相机和第一机械臂相对于标定板的相对位姿关系进行手眼标定,采集多组不重复的相对位姿数据,计算第一深度相机的外部参数,得到第一深度相机相对于第一机械臂的位姿,并根据轨迹算法生成第一机械臂的初始夹取轨迹;
35、根据第二深度相机和第二机械臂相对于标定板的相对位姿关系进行手眼标定,采集多组不重复的相对位姿数据,计算第二深度相机的外部参数,得到第二深度相机相对于第二机械臂的位姿,并根据轨迹算法生成第二机械臂的初始喷涂轨迹。
36、在以上技术方案的基础上,优选的,步骤s4具体包括:
37、s41、对第一机械臂的初始夹取轨迹和第二机械臂的初始喷涂路径分别进行三次样条插值处理,得到最终夹取-砌筑轨迹和最终喷涂路径;
38、s42、调整第一机械臂和第二机械臂的运动顺序,当第一机械臂按照最终夹取-砌筑轨迹夹取待砌筑耐火砖后,第二机械臂按照最终喷涂路径对待砌筑耐火砖进行泥浆喷涂,当第二机械臂喷涂完成后进行复位,第一机械臂按照最终砌筑轨迹进行耐火砖的砌筑;
39、s43、重复步骤s42直至所有待砌筑耐火砖砌筑喷涂完毕。
40、在以上技术方案的基础上,优选的,三次样条插值处理具体包括:
41、分别提取初始夹取轨迹和初始喷涂路径的若干数据点;
42、分别计算初始夹取轨迹和初始喷涂路径相邻两个数据点的速度和加速度;其中,相邻两个数据点的速度和加速度连续;
43、根据相邻两个数据点的速度和加速度分别得到初始夹取轨迹和初始喷涂路径的局部三次多项式曲线段;
44、将初始夹取轨迹和初始喷涂路径的局部三次多项式曲线段进行路径参数化,得到最终夹取-砌筑轨迹和最终喷涂路径;其中路径参数化为将三次多项式曲线段的参数作为时间的函数。
45、第三方面,本发明提供了一种基于双臂协作的砌筑系统,采用如上述所述的砌筑方法,包括:
46、空间构建模块,用于根据标准dh参数建立第二机械臂的dh模型,并对第二机械臂的dh模型进行求解,得到第二机械臂的喷涂空间;
47、第一初始轨迹规划模块,用于对第一深度相机进行外参标定,得到第一深度相机相对于第一机械臂的位姿,并生成第一机械臂的初始夹取轨迹;
48、第二初始轨迹规划模块,用于使用第二深度相机确定第二机械臂的当前位姿,根据第二机械臂的当前位姿对第二机械臂进行喷涂路径避障规划,得到第二机械臂的初始喷涂路径;
49、优化模块,用于对第一机械臂的初始夹取轨迹和第二机械臂的初始喷涂路径进行优化,得到最终夹取-砌筑轨迹和最终喷涂路径;
50、砌筑涂泥模块,第一机械臂和第二机械臂分别按照最终夹取-砌筑轨迹和最终喷涂路径进行夹取和泥浆喷涂。
51、本发明的砌筑机器相对于现有技术具有以下有益效果:
52、(1)通过将第一机械臂的第一端和第二机械臂的第一端与支撑架连接,通过第一机械臂的第一深度相机确定待砌筑耐火砖的位置,使用第一驱动装置驱动夹取装置夹取待砌筑耐火砖,第二机械臂的第二深度相机确定待砌筑耐火砖喷涂泥浆的位置,第二驱动装置驱动耐火泥浆喷涂枪头进行泥浆喷涂,利用控制器控制第一驱动装置和第二驱动装置交替工作,使第一机械臂与第二机械臂协同作用进行砌筑涂泥,提高砌筑的工作效率;
53、(2)通过设置第二机械臂的喷涂空间,对初始夹取轨迹和喷涂路径进行优化得到最终夹取-砌筑轨迹和最终喷涂路径,第一机械臂和第二机械臂分别按照最终夹取-砌筑路径和最终喷涂路径进行耐火砖的夹取与砌筑和泥浆喷涂,确保喷涂过程中不会发生碰撞或超出工作范围,提高机械臂的运动效率和砌筑质量;
54、(3)通过第一深度相机识别出待砌筑耐火砖的型号,进而确定第二机械臂的喷涂起始位姿和喷涂结束位姿,并根据喷涂起始位姿和喷涂结束位姿确定第二机械臂的移动路径,利用第二深度相机确定第二机械臂的当前位姿,根据将第二机械臂的活动图与第二机械臂的移动路径进行碰撞测试,得到第二机械臂的初始喷涂路径,避免第二机械臂在泥浆喷涂过程中与障碍物发生碰撞,确保第二机械臂在泥浆喷涂过程中的稳定性和精确性。
本文地址:https://www.jishuxx.com/zhuanli/20240726/130639.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。