一种基于可调节磁流变液阀的关节驱动器
- 国知局
- 2024-07-30 12:53:58
本发明属于机械传动,涉及一种基于可调节磁流变液阀的关节驱动器。
背景技术:
1、传统电液伺服控制阀用于实现快速准确的控制响应,如精确的位置和速度控制应用,然而这种阀门结构复杂,价格昂贵,且响应时间有限,因此近年来一直在研究一种替代的执行机构,其中一种方法是使用磁流变液作为工作流体。
2、与传统电液伺服控制阀相比,基于磁流变液的液压阀是以磁流变效应为控制原理设计的一种无移动元件的压力控制阀,通过外加磁场强度的大小来调节磁流变阀的压降,其结构简单,运动可靠,控制方便,响应速度快。
3、磁流变液是由微尺度磁性颗粒和载体流体组成,磁性颗粒分布于载体流体中。无磁场的情况下,磁性颗粒随机分散在载体流体中。有磁场情况下,磁性颗粒会沿着磁场方向排成一行,这就导致了垂直于磁场方向的屈服应力随磁场强度的增大而增大。通过控制磁感应强度,可以调节液体屈服应力,这是磁流变液装置的基本工作机理。
4、由于具有快速响应,低功耗,高可控动态调节区间等优势,近年来,研究者提出了大量基于磁流变液的智能装置,包括:磁流变液阻尼器,磁流变液旋转制动器,磁流变液吸震器,磁流变液阀门等。该类智能装置目前已广泛运用于智能驱动器、下肢假肢、下肢外骨骼和医疗设备等。目前国际假肢公司奥索(ossur)提出了一款基于磁流变液旋转制动器的半被动人体膝关节假肢。该款假肢通过控制励磁电流的大小,调节假肢的阻抗力矩,从而模仿人体膝关节在部分状态下的运动功能。与传统的被动假肢相比,该款半主动假肢能明显改善穿戴者的行走步态,提高穿戴者的行走稳定性。然而该款假肢在规定的尺寸和重量限制下,很难保证摆动过程中的流畅(断电下低阻抗力矩)和站立状态下的大力矩支撑(通电下的大阻抗力矩输出),进而限制了该类假肢的进一步推广。
5、对于磁流变液装置来说,最重要的性能指标之一为在规定的尺寸和重量限制下,装置的压降动态调节区间,即磁流变液装置在断电情况下,压降要足够小,当磁流变装置通电情况下,压降要足够大,提供所需的压降。动态调节区间越大,磁流变装置的适用场景越广。
6、磁流变阀大都通过励磁电流作用于磁流变液,从而改变磁流变液阻尼。阀套和阀芯大都为通磁材料,如硅钢,纯铁之类。阀套和阀芯之间形成较窄的流动间隙,该流动间隙填充满磁流变液。励磁单元一般为线圈配合铁芯,通过控制装置的励磁单元的励磁电流,可调节穿过阀套、阀芯以及填充在阀套与阀芯之间的流动间隙的磁流变液的磁场强度,从而调节磁流变液阻尼。断电情况下,磁流变阀的阻尼主要由磁流变液的粘滞力主导,该粘滞力与阀套和阀芯之间的流动间隙的宽度成反比,即减小流动间隙宽度会增加粘滞力引起的阻尼压降。通电情况下,磁流变阀的阻尼压降主要由磁流变液的磁场相关力主导,即增大流动间隙宽度会减小磁场相关力引起的阻尼压降。因此,为满足较大的阻尼压降调节区间,断电情况下的小粘滞压降性能要求与通电情况下的大磁场大压降要求就需要一个性能权衡。
技术实现思路
1、有鉴于此,本发明提供一种基于可调节磁流变液阀的关节驱动器,可以提高现有磁流变阀的阻尼压降的动态调节区间,进而提高磁流变液液压阀在假肢、外骨骼和智能驱动器中的使用性能。
2、为了解决上述问题,本发明的实施例提供了一种基于可调节磁流变液阀的关节驱动器,其特殊之处在于包括:
3、第一关节固定杆和第二关节固定杆;
4、液压缸,所述液压缸包括活塞、活塞推杆和液压缸外壳,所述活塞与所述活塞推杆连接,所述活塞在所述液压缸内腔中相对滑动,将所述液压缸外壳的内腔分为两个腔体,所述液压缸外壳与所述第一关节固定杆通过铰链连接,所述铰链为平面铰链或球铰中的一种,所述活塞推杆与所述第二关节固定杆通过铰链连接,所述铰链为平面铰链或球铰中的一种;
5、可调节磁流变液压阀,所述可调节磁流变液压阀通过液压管与所述液压缸连接,形成密封闭环腔体,所述密封闭环腔体内充满磁流变液体,所述活塞在相对于所述液压缸外壳滑动过程中,所述活塞一端的磁流变液通过所述可调节磁流变液压阀回到所述活塞的另一端;
6、回复弹簧,所述回复弹簧用于克服所述可调节磁流变液压阀和所述液压缸的机械摩擦,使所述第一关节固定杆和所述第二关节固定杆在不承受外力时能回到初始位置。
7、在一些实施例中,所述液压缸为直线单头液压缸,所述活塞只有一端连接所述活塞推杆,为补偿所述活塞在所述液压缸内移动时的所述磁流变液体积的变化,所述液压缸内需放置液压储液器。
8、在一些实施例中,所述液压储液器可放置在所述液压缸外面通过液压管与所述液压缸和所述可调节磁流变液压阀连接形成油液密封闭环。
9、在一些实施例中,所述液压缸为直线双头液压缸,所述活塞两端都各自连接活塞推杆,当活塞在液压缸内移动时,所述油液闭环内的磁流变液的体积不变。
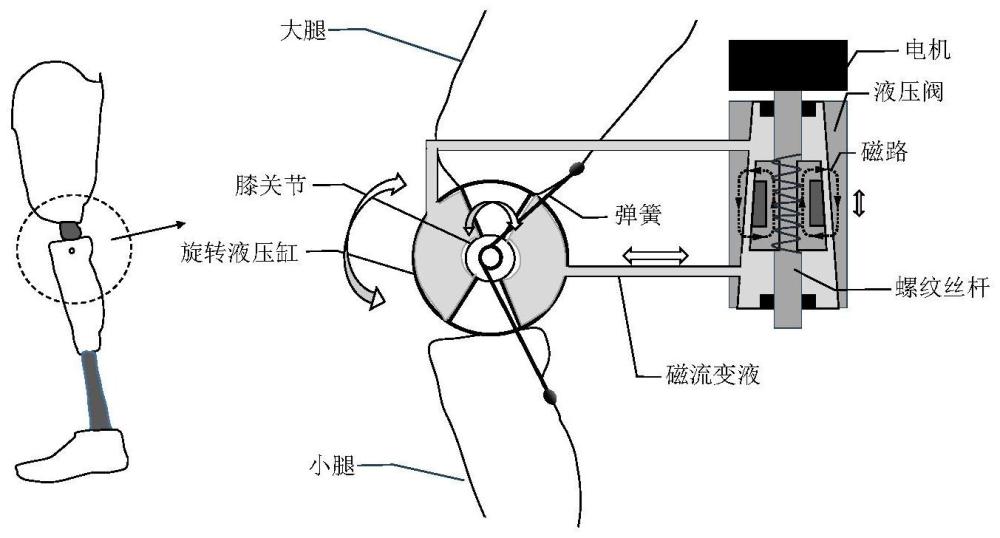
10、在一些实施例中,所述液压缸为旋转液压缸,所述活塞为旋转活塞,当活塞在所述旋转液压缸内旋转时,所述旋转活塞的一端腔体内的磁流变液通过所述可调节磁流变液压阀回到所述活塞的另一端腔体。
11、在一些实施例中,所述第一关节固定杆与所述第二关节固定杆通过球铰连接,可用两个所述液压缸在不同平面内与第一关节固定杆和第二关节固定杆通过球铰连接,通过独立控制两个液压缸的阻力和运动,可控制第一关节固定杆和第二关节固定杆在三维控制的运动和阻力。
12、在一些实施例中,所述可调节磁流变液压阀包括液压阀外壳、液压阀磁芯和励磁线圈,所述液压阀外壳的内壁与所述液压阀磁芯配合形成环状间隙,同时所述液压阀磁芯将液压阀外壳内腔分为两个液压腔体,所述磁流变液可通过穿过所形成的环状间隙从液压阀的一端液压腔体到另一端液压腔体,所述励磁线圈缠绕在液压阀磁芯上,通过控制励磁线圈的电流大小,可控制环状间隙的磁场强度,从而控制磁流变液的粘滞力。
13、在一些实施例中,所述液压阀磁芯为圆锥型,所述液压阀外壳的内腔为圆锥型,通过调节所述液压阀磁芯在所述液压阀外壳内的轴向相对位置,可调节液压阀外壳的内壁与液压阀磁芯配合形成环状间隙的大小,从而可调节磁流变液阀的动态调节区间。
14、在一些实施例中,所述液压阀磁芯与液压阀外壳的轴向相对位置可通过螺纹丝杆调节原理调节,同时保证断电情况下所述液压阀磁芯与所述液压阀外壳的轴向相对位置不变。
15、在一些实施例中,所述可调节磁流变液压阀还包括螺纹丝杆和直流电机,所述液压阀磁芯与所述液压阀外壳可在轴向上相对移动,不能相对转动,所述励磁线圈缠绕在所述液压阀磁芯上,通过控制所述励磁线圈的电流大小来控制所述环状间隙的磁场强度,从而控制所述磁流变液的粘滞力,所述液压阀磁芯内设有螺纹,所述液压阀磁芯与所述螺纹丝杆连接,所述螺纹丝杆通过联轴器与所述直流电机的电机轴连接,所述直流电机通电带动所述螺纹丝杆转动,所述液压阀磁芯相对液压阀外壳在轴向上移动,从而改变所述环状间隙的大小。
16、在一些实施例中,所述回复弹簧为扭矩弹簧,所述扭矩弹簧的一端与所述第一关节固定杆连接,另一端与所述第二关节固定杆连接。
17、在一些实施例中,所述扭矩弹簧为恒扭矩弹簧,扭矩大小等于所述关节驱动器的机械摩擦力,从而使所述第一关节固定杆和所述第二关节固定杆在不承受外力情况下回复初始位置。
18、在一些实施例中,所述回复弹簧为拉伸和压缩弹簧中的一种,所述回复弹簧的一端与所述第一关节固定杆连接,另一端与所述第二关节固定杆连接。
19、在一些实施例中,所述回复弹簧为拉伸、压缩弹簧和空气弹簧中的一种,所述回复弹簧的一端与所述液压缸的液压缸外壳连接,另一端与所述液压缸的活塞推杆连接,当所述液压缸的活塞与液压缸的外壳有相对运动时,所述回复弹簧被压缩或释放。
20、在一些实施例中,该关节驱动器可用于下肢踝关节、膝关节、髋关节的、肩关节、肘关节的假肢和外骨骼的驱动。
21、在一些实施例中,所述基于可调节磁流变液阀的关节驱动器可与电机驱动相结合,提供可控的主动驱动力和阻抗力矩。
22、与现有技术相比,本发明的基于可调节磁流变液阀的关节驱动器至少具有下列有益效果:
23、本发明通过调节装置内部的阀套和阀芯之间的流动间隙大小从而提高所述液压阀压降的动态调整区间,进而提高磁流变液液压阀在假肢、外骨骼和智能驱动器中的使用性能。具体实现时,为降低所述液压阀在断电下的阻尼压降,可增大阀套和阀芯之间的流动间隙。为提高所述液压阀在通电下的阻尼压降,减小阀套和阀芯之间的流动间隙。例如,基于所述磁流变液液压阀的智能膝关节假肢,在人体摆动状态,能提供更低的阻尼压降,确保膝关节流畅的摆动;在站立状态能提供足够大的阻尼压降,支撑截肢者的身体重量,从而整体提高假肢的行走辅助功能。此外,改变内部阀套和阀芯之间的流动间隙会改变间隙内磁流变液的磁场分布。减小阀套和阀芯之间的流动间隙,在同样的励磁电流下,间隙中的磁流变液的磁场强度会增加。反之,增大阀套和阀芯之间的流动间隙,在同样励磁电流下,间隙中的磁流变液的磁场强度会减小。
24、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
本文地址:https://www.jishuxx.com/zhuanli/20240729/162211.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表