一种超越式离合器的制作方法
- 国知局
- 2024-07-30 13:16:24
本技术涉及一种传动装置,具体涉及一种超越式离合器。
背景技术:
1、双向超越离合器机械设计一般是主动轴输入转矩,正反转都行,能带动从动轴转动;从动轴输入转矩,主动轴不转。
2、在针对此机械结构小型化设计应用中,目前现有两种方案,方案一:在电机上设计有六角法兰,同时设计有塑料保持架,在六角法兰的六个面放有滚珠,在通过弹簧将滚珠抱紧在六角法兰上;同时电机上装有轴承,电机套套在轴承上,滚珠与电机套之间有微小的间隙;本方案中,电机套就是从动轴,电机组件为输入轴,电机转动时,由于塑料支架和电机之间有阻尼,使六角法兰与滚珠产生相对运动,滚珠会被法兰顶开,这时电机套和滚珠会被法兰压在一起,电机就带着电机套一起转动;反之,电机套转动,由于滚珠和电机套之间有间隙,无法带动电机转动,从而保护电机;此方案缺点:1.保持架的阻尼会增加持续消耗能量;2.整体装配比较复杂;3.对零件尺寸精度要求较高;方案二:通过悬臂齿轮旋转实现离合;缺点:1.结构容易锁死失效;2.电机启动会有一圈的空程。
3、如中国专利cn212131117u,公开日2020年12月11日,公开了一种新型超越离合器总成,包括外环齿轮,内环凸轮,中间输入轴输入齿轮装置,离合载荷平衡装置,所述离合载荷平衡装置活动设置于所述内环凸轮与外环齿轮之间,所述离合载荷平衡装置包括布设于所述内环凸轮外周壁的若干稳定承载部,以及分别通过相应的稳定承载部设置于所述内环凸轮与外环齿轮相应内周壁面之间的、直径为20mm的滚柱,所述稳定承载部为分布设置于所述内环凸轮周壁面上的、与所述滚柱对应的台阶面,所述离合载荷平衡装置还包括与所述滚柱对应的自适应缓冲平衡助力装置,虽然该新型超越离合器总成运行稳定可靠,承受载荷大而均匀,但该装置仅为机械部分的离合控制,还不能解决机械部分和电动部分同时控制结构转动的问题。
技术实现思路
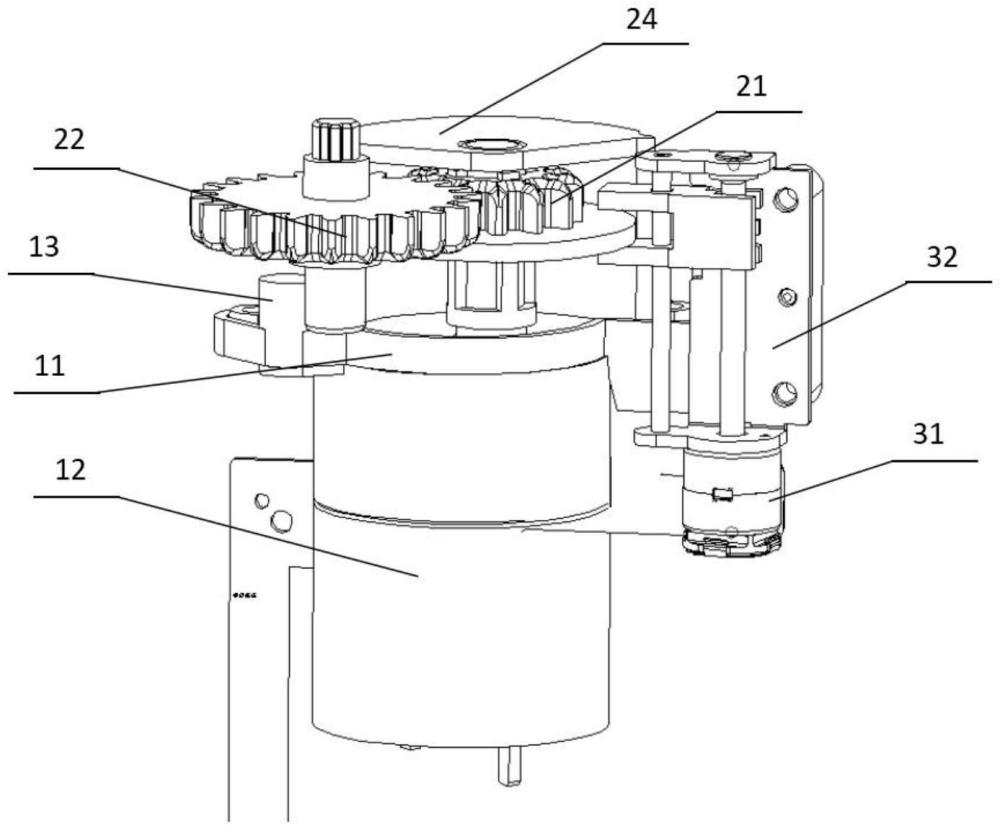
1、本实用新型的目的在于针对现有技术上的缺陷,提出了一种超越式离合器,用于控制目标齿轮与主动齿轮之间的啮合,所述主动齿轮由驱动电机的输出轴驱动进行转动,所述主动齿轮匹配有一个推动件,所述的推动件沿驱动电机的输出轴进行轴向运动,并带动所述主动齿轮在驱动电机的输出轴上进行轴向运动,所述推动件由独立控制的离合电机通过传动件进行驱动,所述驱动电机的输出轴设置有一个啮合位和一个脱离位,当主动齿轮处于啮合位时,主动齿轮与目标齿轮啮合,当主动齿轮处于脱离位时,主动齿轮与目标齿轮脱离。本实用新型采用双驱动,驱动电机作为转矩输入,离合电机作为离合的开关,实现双向超越离合的功能,解决机械部分和电动部分同时控制某个结构时,保护电机和pcb板不受损坏的问题,同时机械部分也有更好的体验感。
2、作为优选,所述推动件为圆形推动板,所述圆形推动板的中部依据驱动电机的输出轴配置有连接孔,所述驱动电机的输出轴依次贯穿推动件和主动齿轮与限位顶板连接。
3、作为优选,所述离合电机固定安装在电机支架上,所述离合电机与所述驱动电机之间的相对位置固定。
4、作为优选,所述传动件包括一个往复卡爪和一对导向轨,所述往复卡爪的整体呈c字形,往复卡爪的爪头空隙与圆形的推动件厚度相同,圆形的推动件插入往复卡爪的爪头空隙处,所述的往复卡爪的爪身配设在所述的导向轨上,所述导向轨安装在电机支架上,所述的导向轨中包括一根为主动丝杆,所述主动丝杆与所述的离合电机输出轴传动连接。
5、作为优选,所述电机支架的两侧对称设置有用于支撑导向轨的翻边,所述的一个翻边上固定连接有离合电机安装台,所述离合电机固定在离合电机安装台上,离合电机的输出轴通过传动齿轮组与主动丝杆连接,连接主动丝杆的传动齿轮组配设在离合电机安装台内。
6、作为优选,所述推动件的直径大于主动齿轮的直径,所述限位顶板的形状与推动件的形状相同。
7、作为优选,所述目标齿轮中轮齿朝向驱动电机一侧的轴向均呈c角导向,所述主动齿轮中轮齿朝向限位顶板一侧轴向均呈c角导向。
8、作为优选,所述驱动电机的输出轴为花键轴,所述目标齿轮通过一个花键轴安装在主支架上。
9、作为优选,所述驱动电机与主支架固定连接,所述主支架上设置有用于安装的连接部。
10、作为优选,所述离合电机为带有自锁功能的步进电机。
11、本实用新型的有益效果是:
12、1、本实用新型采用双电机,驱动电机作为转矩输入,离合电机作为离合的开关,实现双向超越离合的功能;
13、2、主动齿轮和目标齿轮的轴向设计均呈c角导向,同时加大齿轮间的侧隙,使主动齿轮与目标齿轮容易啮合,使该实施例对零件精度要求不高,解决了撞齿问题;
14、3、本实用新型组装简单,结构稳定,适应性广。
技术特征:1.一种超越式离合器,用于控制目标齿轮(22)与主动齿轮(21)之间的啮合,其特征在于,所述主动齿轮(21)由驱动电机(12)的输出轴驱动进行转动,所述主动齿轮(21)匹配有一个推动件(23),所述的推动件(23)沿驱动电机(12)的输出轴进行轴向运动,并带动所述主动齿轮(21)在驱动电机(12)的输出轴上进行轴向运动,所述推动件(23)由独立控制的离合电机(31)通过传动件(33)进行驱动,所述驱动电机(12)的输出轴设置有一个啮合位和一个脱离位,当主动齿轮(21)处于啮合位时,主动齿轮(21)与目标齿轮(22)啮合,当主动齿轮(21)处于脱离位时,主动齿轮(21)与目标齿轮(22)脱离。
2.根据权利要求1所述的一种超越式离合器,其特征在于,
3.根据权利要求2所述的一种超越式离合器,其特征在于,
4.根据权利要求1所述的一种超越式离合器,其特征在于,
5.根据权利要求3所述的一种超越式离合器,其特征在于,
6.根据权利要求3所述的一种超越式离合器,其特征在于,
7.根据权利要求6所述的一种超越式离合器,其特征在于,
8.根据权利要求6所述的一种超越式离合器,其特征在于,
9.根据权利要求8所述的一种超越式离合器,其特征在于,
10.根据权利要求5所述的一种超越式离合器,其特征在于,
技术总结本技术涉及一种传动装置,具体涉及一种超越式离合器,用于控制目标齿轮与主动齿轮之间的啮合,主动齿轮由驱动电机的输出轴驱动进行转动,主动齿轮匹配有一个推动件,所述的推动件沿驱动电机的输出轴进行轴向运动,并带动所述主动齿轮在驱动电机的输出轴上进行轴向运动,驱动电机的输出轴设置有一个啮合位和一个脱离位,当主动齿轮处于啮合位时,主动齿轮与目标齿轮啮合,当主动齿轮处于脱离位时,主动齿轮与目标齿轮脱离。本技术采用双驱动电机,直流电机作为转矩输入,步进电机作为离合的开关,实现双向超越离合的功能,解决机械部分和电动部分同时控制某个结构时,保护电机和PCB板不受损坏的问题,同时机械部分也有更好的体验感。技术研发人员:宋丹涛,张杰,刘晓沐,武建康受保护的技术使用者:杭州遁甲科技有限公司技术研发日:20231222技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240729/163304.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表