一种破碎液压系统及其控制方法与流程
- 国知局
- 2024-07-30 14:29:13
本技术涉及破碎液压系统施工,具体涉及一种破碎液压系统及其控制方法。
背景技术:
1、技术破碎锤作业在矿山工况中较为常见,破碎锤在使用时需要破碎液压系统中的泵体对其进行供油,破碎液压系统中通常配备有两个泵体。
2、然而现有技术中的破碎液压系统在长时间的破碎过程中,由于两个泵体间的切换不便,其中一个泵体会长期作为工作泵使用,其使用率会明显高于另一个泵,双泵受力负载不均衡,容易老化。同时,破碎工况中只能实现单泵供油或者双泵供油,而不能按流量需求选择是否需要双泵合流,难以满足较大的流量需求。
技术实现思路
1、本技术的目的在于提供一种破碎液压系统,以解决现有技术中破碎锤在使用时,双泵受力负载不均衡以及难以根据流量需求选择相应供油模式的技术问题。
2、为解决上述技术问题,本技术是采用下述技术方案实现的:
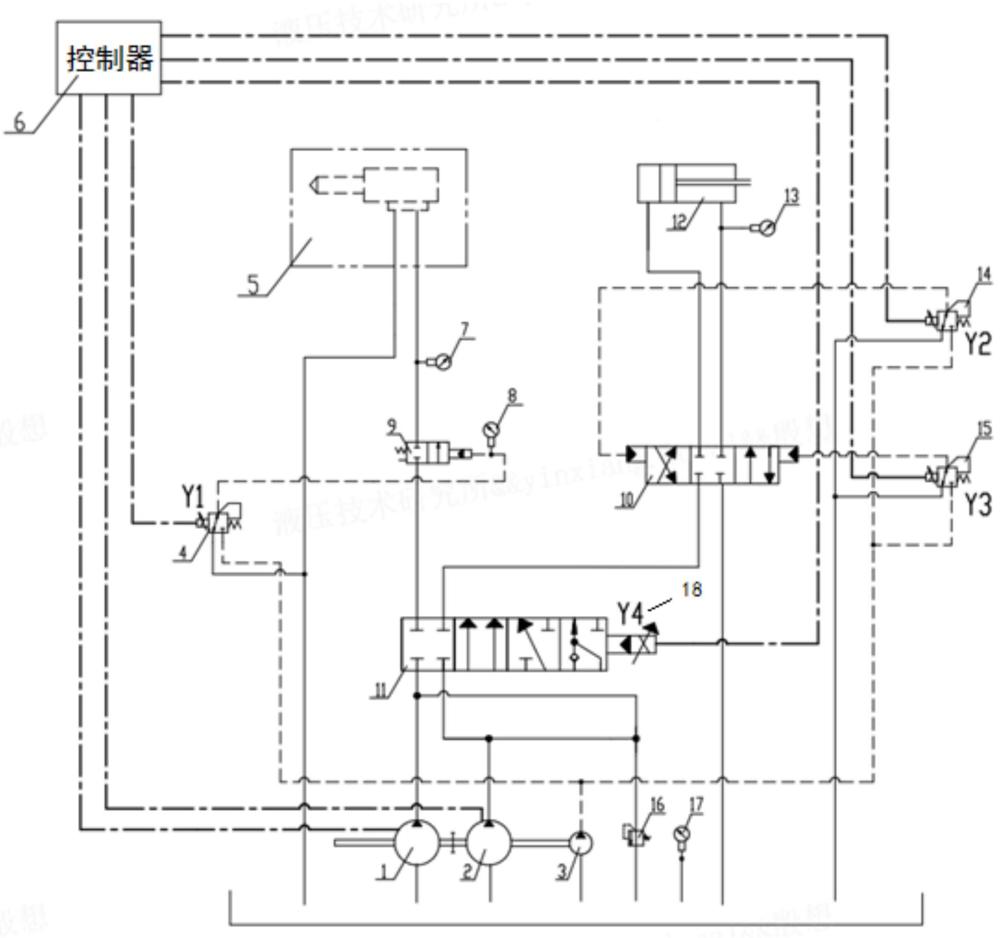
3、第一方面,本技术提供一种破碎液压系统,包括破碎锤、主泵i1和主泵ii2,其特征在于,还包括单双泵切换阀,所述单双泵切换阀至少具有第一工位、第二工位和第三工位,并能够根据控制器的控制在第一工位、第二工位和第三工位之间切换;
4、当所述单双泵切换阀切换至第一工位时,液压油通过所述主泵i1泵送至所述单双泵切换阀,并通过所述单双泵切换阀输送至所述破碎锤的工作油口;
5、当所述单双泵切换阀切换至第二工位时,液压油通过所述主泵ii2泵送至所述单双泵切换阀,并通过所述单双泵切换阀输送至所述破碎锤的工作油口;
6、当所述单双泵切换阀切换至第三工位时,所述主泵i1、主泵ii2同时投入工作,所述单双泵切换阀将所述主泵i1、主泵ii2泵送的液压油合流后输送至所述破碎锤的工作油口。
7、在一些实施例中,所述单双泵切换阀配置有第四先导电磁阀;所述第四先导电磁阀用于接收所述控制器发送的电信号,以驱使所述单双泵切换阀在第一工位、第二工位以及第三工位之间切换。
8、在一些实施例中,还包括动臂油缸、液控换向阀、破碎控制阀和用于采集所述动臂油缸的动臂压力的动臂压力传感器;
9、所述液控换向阀连接于所述单双泵切换阀和所述动臂油缸之间的油路中,用于在一键破碎模式下,根据所述控制器的控制执行换向动作,以控制所述动臂油缸的动臂执行下压、停止下压和抬升操作;
10、所述破碎控制阀连接于所述单双泵切换阀和所述破碎锤之间的油路中,用于在连续破碎模式下,根据所述控制器的控制执行换向动作,以控制所述单双泵切换阀与所述破碎锤之间油路的通断;以及还用于在一键破碎模式下,当所述动臂油缸的动臂压力超过第一设定阈值时,根据所述控制器的控制连通所述单双泵切换阀与所述破碎锤。
11、在一些实施例中,所述破碎控制阀配置有第一先导电磁阀,所述液控换向阀配置有第二先导电磁阀和第三先导电磁阀;所述第一先导电磁阀、第二先导电磁阀和第三先导电磁阀分别与所述控制器信号连接;
12、响应于接收到一键破碎指令,所述控制器控制所述单双泵切换阀切换至第一工位,并通过所述第二先导电磁阀控制所述液控换向阀换向至下压工位,以使所述动臂执行下压操作;
13、响应于所述动臂压力超过所述第一设定阈值,所述控制器通过所述第一先导电磁阀控制所述破碎控制阀导通,以使所述破碎锤执行破碎动作;
14、响应于所述动臂压力超过第二设定阈值,所述控制器通过所述第二先导电磁阀控制所述液控换向阀换向至截止工位,以使所述动臂停止下压操作;
15、响应于一键破碎指令终止,所述控制器通过所述第一先导电磁阀控制所述破碎控制阀截止,以使所述破碎锤终止破碎动作,同时所述控制器还通过所述第三先导电磁阀使所述液控换向阀换向至抬升工位,以使所述动臂执行抬升操作;
16、其中,所述第二设定阈值大于所述第一设定阈值。
17、在一些实施例中,当破碎需求流量未超过设定流量阈值时,所述控制器根据所述主泵i1和所述主泵ii2的工作时间,控制所述单双泵切换阀在所述第一工位和所述第二工位之间切换;当所述破碎需求流量超过所述设定流量阈值时,所述控制器控制所述单双泵切换阀切换至第三工位;
18、其中,所述主泵i1和所述主泵ii2的工作时间根据所述第一先导电磁阀的通电时间确定。
19、响应于所述第一先导电磁阀的通电时间达到预设的切换时间t,所述控制器控制所述单双泵切换阀进行所述第一工位和所述第二工位之间的切换,同时,重新从零记录所述第一先导电磁阀的通电时间。
20、在一些实施例中,所述破碎控制阀配置有先导压力传感器8,用于检测所述破碎控制阀的先导油口处的先导压力,仅当所述先导压力超过设定的先导压力阈值时,开始记录所述第一先导电磁阀的通电时间。
21、在一些实施例中,所述破碎锤的工作油口处设置有破碎压力传感器;
22、响应于所述破碎压力传感器所采集的破碎压力持续低于设定破碎压力阈值,且持续时间达到t1,所述控制器控制仪表输出报警;
23、响应于所述破碎压力传感器所采集的破碎压力持续低于设定破碎压力阈值,且持续时间达到t2,所述控制器控制所述破碎控制阀断开,切断所述单双泵切换阀与所述破碎锤之间的油路;
24、其中,t1小于t2。
25、在一些实施例中,所述控制器还连接有液压油温度传感器;
26、响应于所述单双泵切换阀位于第三工位,且所述液压油温度传感器采集的液压油温度超过设定温度阈值,所述控制器控制所述单双泵切换阀切换至第一工位或第二工位。
27、第二方面,本技术提供一种挖掘机,其包括第一方面任一项所述的破碎液压系统。
28、第三方面, 本技术提供一种破碎液压系统的控制方法,所述控制方法采用所述的破碎液压系统,包括:
29、当破碎需求流量未超过设定流量阈值时,所述控制器根据所述主泵i1和所述主泵ii2的工作时间,控制所述单双泵切换阀在所述第一工位和所述第二工位之间切换;
30、当所述破碎需求流量超过所述设定流量阈值时,所述控制器控制所述单双泵切换阀切换至第三工位;
31、或者,
32、所述控制方法采用所述的破碎液压系统,包括:
33、响应于接收到一键破碎指令,所述控制器控制所述单双泵切换阀切换至第一工位,并控制所述液控换向阀执行换向动作,以驱动所述动臂油缸的动臂执行下压操作;
34、响应于所述动臂油缸的动臂压力超过第一设定阈值,所述控制器控制所述破碎控制阀连通所述单双泵切换阀与所述破碎锤的工作油口,以驱动所述破碎锤执行破碎动作;
35、响应于所述动臂油缸的动臂压力超过第二设定阈值,所述控制器控制所述液控换向阀执行换向动作,以控制所述动臂油缸的动臂停止下压操作;
36、响应于一键破碎指令终止,所述控制器控制所述液控换向阀执行换向动作,以控制所述动臂油缸的动臂执行抬升操作。
37、与现有技术相比,本技术所达到的有益效果:
38、1、本发明的液压系统在连续破碎模式下,通过单双泵切换阀在第一工位和第二工位之间的切换,便能够实现主泵i1和主泵ii2的交替供油,切换方便,从而均衡两个泵体的负载并提高泵体的使用寿命。同时,该单双泵切换阀也能够被控制,以在第一工位(或第二工位)与第三工位之间切换,使得操作人员能够自行选择供油模式(单泵供油或双泵供油),以更好地满足实际的破碎流量需求。
39、2、本发明的液压系统在一键破碎模式下,通过控制液控换向阀的换向便能够控制动臂执行相应的动作(执行下压、停止下压或抬升操作),以配合相应的动臂辅助需求。动臂辅助需求包括:一键破碎模式开始时所需的动臂下压、动臂压力超过阈值时为了防止侧翻所需的动臂停止下压、一键破碎模式终止时所需的动臂抬升。此外,动臂压力超出第一设定阈值还能够作为破碎锤开始破碎的开启指令。
40、3、本发明的液压系统在连续破碎模式下,通过控制破碎控制阀便能够控制破碎锤持续破碎或停止破碎,以在破碎压力传感器所采集的破碎压力持续低于阈值时自动停止破碎以实现破碎防击空。
本文地址:https://www.jishuxx.com/zhuanli/20240729/167063.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。