一种基于中枢模式发生器的六足机器人运动控制方法
- 国知局
- 2024-07-30 09:20:36
本发明涉及仿生机器人控制领域,具体涉及一种基于中枢模式发生器的六足机器人运动控制方法。
背景技术:
1、足式机器人相较于轮式机器人,有着更优秀的应对非结构化地形的能力,近几年被研究者广泛关注。目前所研制的足式机器人主要有双足、四足、六足以及八足,其中六足机器人以其丰富的运动形式,冗余的肢体结构,优秀的灵活性和对复杂环境的强大适应能力,在救援和探测等场合得到了广泛的应用。
2、然而,传统的六足机器人通过动力学或者运动学进行步态规划和控制,工程实现复杂,计算量大,且对环境的适应性较差,很难周期性地协调六足机器人进行有序运动。1966年,shik ml等人发现生物体内通过cpg来控制生成节律运动的现象,这一发现为cpg控制在足式机器人上的应用奠定了基础。日本学者kimura最早将cpg仿生控制运用到足式机器人的运动控制当中,并且在四足机器人上成功验证了基于kirmura振荡器的cpg控制模型的有效性。
3、当前已经有研究将cpg控制模型运用在六足机器人运动控制上,如中国发明公开专利cn116203866a中的“一种六足机器人的cpg控制系统及其步态生成方法”,该方案提出了一种具有固定相位差的周期节律生成器以及多种步态的模式组合器。如中国发明公开专利cn113885540a公开的“水下六足机器人壁面攀爬及跨越的运动规划与控制方法”,提出了一种混合驱动水下六足机器人壁面攀爬及跨越的运动规划与控制方法。但这些方法都仅在运动控制的层面进行六足机器人运动控制器设计,而实际中六足机器人通常工作在崎岖、陡峭的复杂环境中,考虑这种非结构环境工作对机器人的稳定性、鲁棒性和能量消耗有着严格的要求。在相同距离下,六足机器人的能耗显著高于相同尺寸的轮式机器人,为了提高六足机器人在非结构化环境下的作业时间,通过对六足机器人进行动力学分析以降低其能量消耗是目前急需解决的问题。
技术实现思路
1、针对现在技术的不足,本发明提供一种基于中枢模式发生器的六足机器人运动控制方法,构建六足机器人cpg控制器,研究cpg控制器参数和机器人能量消耗之间的关系并搜索cpg控制器参数空间,得到最优化能耗指标,提高六足机器人在非结构化环境下的工作效率。
2、本发明至少通过如下技术方案之一实现。
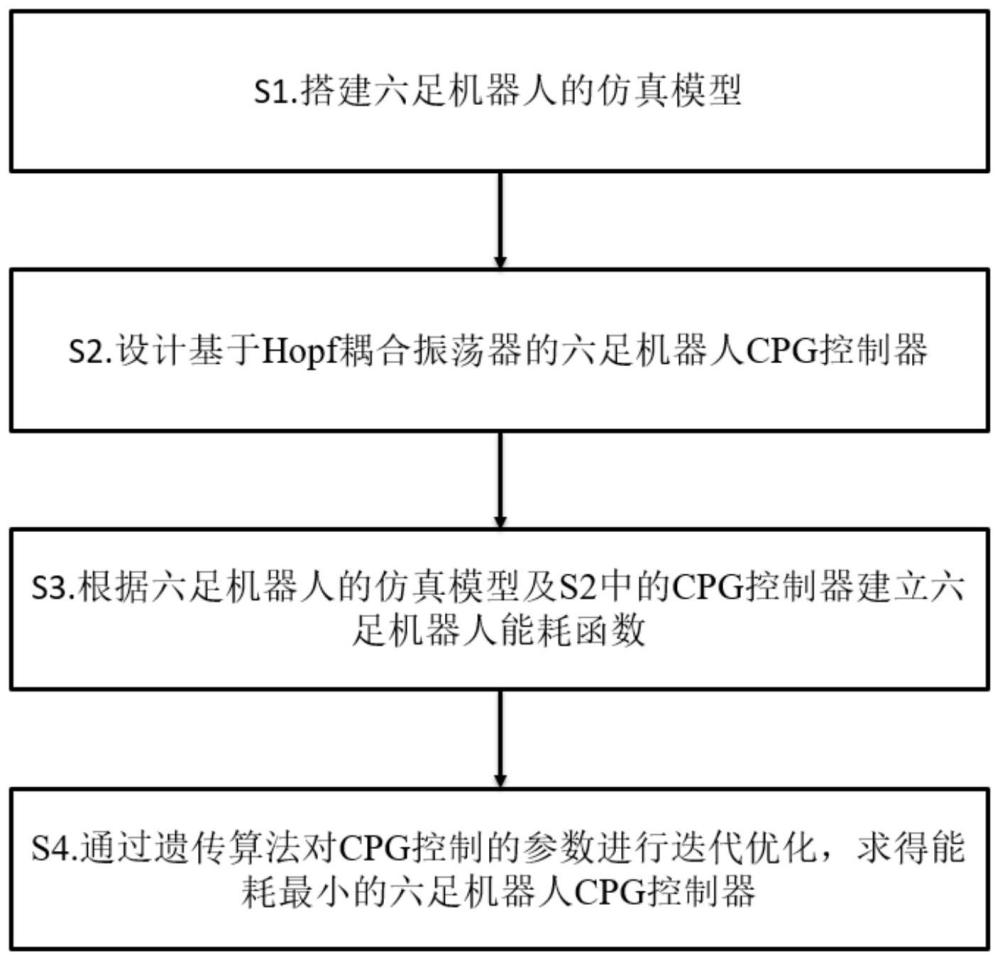
3、一种基于中枢模式发生器的六足机器人运动控制方法,包括以下步骤:
4、搭建六足机器人的仿真模型;
5、构建基于hopf耦合振荡器的六足机器人cpg控制器,通过建立映射函数的方法,将cpg的输出信号转化为机器人各腿部关节的角度;
6、根据六足机器人的仿真模型及所述cpg控制器建立六足机器人能耗函数;
7、对所述cpg控制器的参数进行迭代优化,得到能耗最小的六足机器人cpg控制器,控制六足机器人运动。
8、进一步地,所述构建基于hopf耦合振荡器的六足机器人cpg控制器,包括:
9、以hopf振荡器作为cpg控制器的信号输出单元,基于hopf耦合振荡器的cpg控制器的信号输出单元,其数学模型如下所示:
10、
11、其中x和y为振荡器的两个输出变量,α和β决定着输出波形的收敛速度,为输出信号的振幅,v是振荡器的频率;
12、根据六足机器人不同行走步态的特点在hopf振荡器模型的基础上,加入了占地系数ε、摆动相频率ωswing和支撑相频率ωstance,以满足不同行走方式的需求,得到改进的hopf耦合振荡器模型为:
13、
14、上式中b为大于0的数,以确保振荡器能够取到支撑相和摆动相之间的频率。当参数ε取1/2,2/3,5/6时,分别对应六足机器人的三足步态、四足步态和五足步态;
15、通过多个hopf振荡器之间的相互耦合搭建cpg控制器,六足机器人的每条腿分别用一个振荡器来控制生成步态信号,相邻两腿之间的cpg控制器相互耦合形成,基于hopf振荡器改进的数学模型如下:
16、
17、上式中和用于调整输出信号的中心位置,λ表示相邻两个振荡器之间的耦合强度。
18、进一步地,通过调整各振荡器之间的相位差,实现六足机器人不同的节律步态,耦合项之间的表达式如下所示:
19、
20、上式中,θji表示振荡器i,j之间的相位差。
21、进一步地,三足、四足以及五足步态所对应的腿间相位差为:对于三足步态,摆动相和支撑相平分一个周期的时间,摆动相和支撑相的相位差为π,对于四足步态,摆动相占用一个周期中1/3的时间,两支摆动相的腿为一组,其余四支支撑相的腿为两组,摆动相组腿的相位差为4/3π,支撑相组腿的相位差为2/3π,对于五足步态,每条腿作为单独的一组,相邻两组之间的相位差为1/3π。
22、进一步地,所述通过建立映射函数的方法,将cpg的输出信号转化为机器人各腿部关节的角度中,单腿各个关节角度函数定义如下:
23、
24、其中,k0,k1,k2和k3为比例系数,θi1为六足机器人髋关节的转角,θi2为六足机器人膝关节的转角,θi3为六足机器人踝关节的转角。
25、进一步地,所述六足机器人能耗函数为
26、
27、其中eall为机器人总体能耗,为关节角速度,τ表示六足机器人的关节驱动力矩,i表示六足机器人的第i条腿,j表示对应腿上的第j个关节,t1到t2为机器人的运动时间区间,t为积分方程中的参数。
28、进一步地,采用遗传算法对cpg控制器的参数进行迭代优化。
29、进一步地,采用遗传算法进行迭代优化的步骤包括:
30、根据六足机器人能耗函数,计算种群p(n)个体的个体适配值,即为相同区间内,不同个体带来的能量消耗;
31、执行赌轮盘选择算法,根据所述个体适配值,选择更优秀的个体,即能量消耗更小的个体并执行复制,将复制的个体添加进种群中;
32、模拟生物遗传中的交叉过程,采用单点交叉的方式选择两个交叉个体执行交叉操作,产生新的个体并添加进种群中;
33、对种群中的个体执行均匀变异算子,将变异后的新个体填入种群中,最终得到新一代种群p(n+1);
34、重复以上步骤,当种群进化代数达到设定值时,选择最优个体作为输出的最优解,并结束遗传算法迭代过程;
35、解码获得最佳个体对应的六足机器人cpg控制器的参数值。
36、进一步地,根据cpg控制器映射生成六足机器人各关节的转角,利用动力学方程计算出驱动力矩,最后根据六足机器人能耗函数计算出机器人在区间内的能量消耗。
37、进一步地,六足机器人的动力学方程如下:
38、
39、上式中,τi=[τi1 τi2 τi3]t代表六足机器人各关节的驱动力矩;m(θi)表示机器人的惯性矩阵,θi、分别表示机器人关节转角、关节角速度和关节角加速度;代表机器人第i个关节的离心力和哥氏力系数矩阵;g(θi)=[gi1 gi2 gi3]是机器人各关节的重力项。
40、与现有技术相比,本发明至少能够实现以下有益效果:
41、(1)本发明构建的六足机器人cpg控制器,研究cpg控制器参数和机器人能量消耗之间的关系并搜索cpg控制器参数空间,得到最优化能耗指标,提高六足机器人在非结构化环境下的工作效率。
42、(2)本发明方法能够自动产生稳定的耦合振荡信号用于协调控制六足机器人的各个关节,不需要按照预先设定的模式由控制器逐一解算出控制指令,具有良好的抗干扰能力。进一步,
本文地址:https://www.jishuxx.com/zhuanli/20240730/149104.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表