多面体控制器的控制方法、控制装置和车辆与流程
- 国知局
- 2024-07-30 09:22:09
本申请涉及智能控制,尤其涉及一种多面体控制器的控制方法、控制装置和车辆。
背景技术:
1、作为一种简单易控的控制器,魔方控制器等多面体控制器逐渐被应用在越来越多的智能控制场景中,以实现对场景中设备的控制。多面体控制器能够对自身位置和姿态情况进行检测,根据自身位置和姿态的变化确定移动轨迹,据此确定用户的操作轨迹,进而确定用户的操作意图,发出控制指令。
2、在实际使用时,用户往往只需移动多面体控制器即可实现对特定设备的准确控制。然而,在车辆应用场景下,车辆本身也处于不断变化的移动过程中,直接根据多面体控制器检测到的移动轨迹进行控制很有可能发生误判,无法保证控制过程的准确性。
技术实现思路
1、本申请提供一种多面体控制器的控制方法、控制装置和车辆,用于提升车辆应用场景下,多面体控制器控制过程的准确性。
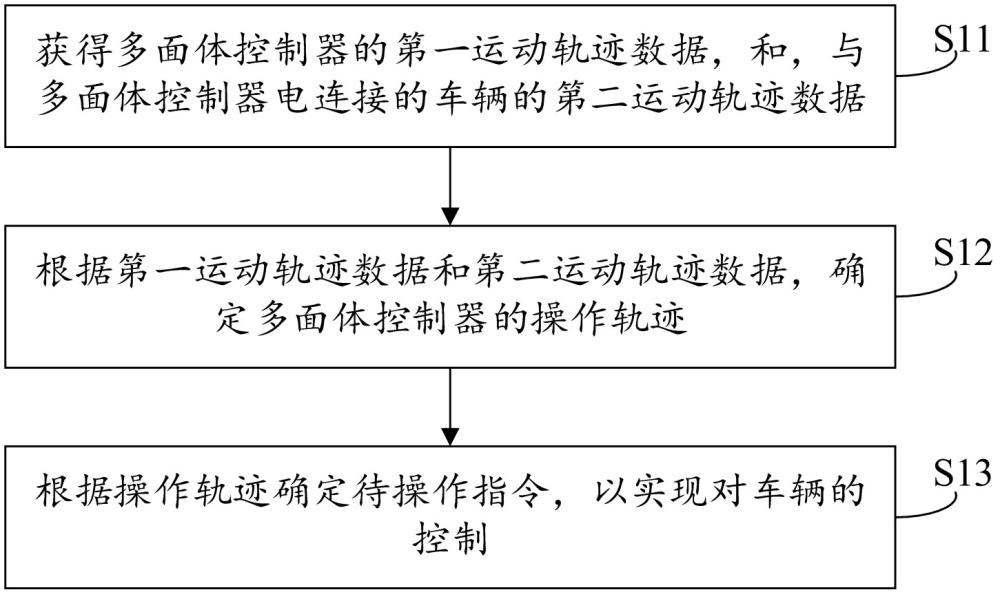
2、本申请提供一种多面体控制器的控制方法,包括:获得多面体控制器的第一运动轨迹数据,和,与多面体控制器电连接的车辆的第二运动轨迹数据;根据第一运动轨迹数据和第二运动轨迹数据,确定多面体控制器的操作轨迹;根据操作轨迹确定待操作指令,以实现对车辆的控制。
3、在一些实施例中,根据第一运动轨迹数据和第二运动轨迹数据,确定多面体控制器的操作轨迹,包括:对第一运动轨迹数据和第二运动轨迹数据进行时间同步,并将完成时间同步的第一运动轨迹数据记为第一同步轨迹数据,将完成时间同步的第二运动数据记为第二同步轨迹数据;根据第一同步轨迹数据和第二同步轨迹数据,确定多面体控制器的操作轨迹。
4、在一些实施例中,对第一运动轨迹数据和第二运动轨迹数据进行时间同步,包括:对第一运动轨迹数据和第二运动轨迹数据进行降噪处理,并将经过降噪处理的第一运动轨迹数据记为第一中间轨迹数据,将经过预处理的第二运动轨迹数据记为第二中间轨迹数据;通过设定算法计算得到第一中间轨迹数据和第二中间轨迹数据之间的延迟时长;根据延迟时长校准第一中间轨迹数据和第二中间轨迹数据,以使第一中间轨迹数据和第二中间轨迹数据同步。
5、在一些实施例中,通过设定算法计算得到第一中间轨迹数据和第二中间轨迹数据之间的延迟时长,包括:通过第一设定算法和第二设定算法中的至少一者得到第一中间轨迹数据和第二中间轨迹数据的延迟时长;其中,第一设定算法为线性算法,第二设定算法为非线性算法。
6、在一些实施例中,通过第一设定算法和第二设定算法得到第一中间轨迹数据和第二中间轨迹数据之间的延迟时长,包括:通过第一设定算法得到第一中间轨迹数据和第二中间轨迹数据的延迟时长,记为第一延迟时长;判断第一延迟时长是否满足稳定性要求;若第一延迟时长满足稳定性要求,则确定第一延迟时长为第一中间轨迹数据和第二中间轨迹数据的延迟时长;若第一延迟时长不满足稳定性要求,则通过第二设定算法得到第一中间轨迹数据和第二中间轨迹数据之间的延迟时长。
7、在一些实施例中,判断第一延迟时长是否满足稳定性要求,包括:将第一延迟时长录入延迟时长记录表,延迟时长记录表中记录有多个历史延迟时长;确定延迟时长记录表中第一延迟时长和所有历史延迟时长的方差;若方差小于或等于方差阈值,则确定第一延迟时长满足稳定性要求;若方差大于方差阈值,则确定第一延迟时长不满足稳定性要求。
8、在一些实施例中,第一设定算法包括互相关函数算法;通过第一设定算法确定第一中间轨迹数据和第二中间轨迹数据的延迟时长,包括:计算第一中间轨迹数据和第二中间轨迹数据的互相关函数,其中互相关函数的因变量为时长;确定使互相关函数的函数值最大的时长为延迟时长。
9、在一些实施例中,确定使互相关函数的函数值最大的时长为延迟时长,包括:向互相关函数多次赋值,并比较多次赋值对应的互相关函数的函数值,以确定使互相关函数的函数值最大的时长,记为校准时长;若校准时长为多次赋值中的边界值,则扩大赋值范围,直至得到使互相关函数的函数值最大、且为非边界值的时长,确定为延迟时长。
10、在一些实施例中,第二设定算法包括动态时间规整算法;通过第二设定算法计算第一中间轨迹数据和第二中间轨迹数据的延迟时长,包括:构造第一中间轨迹数据和第二中间轨迹数据的累积距离矩阵;寻找累积距离矩阵中起始点数据与终点数据之间的最佳路径,以使沿最佳路径的累积距离最小;根据累积距离矩阵的最佳路径确定延迟时长。
11、在一些实施例中,对第一运动轨迹数据和第二运动轨迹数据进行降噪处理,包括:对第一运动轨迹数据和第二运动轨迹数据分别进行滤波处理、幅度归一化处理和差分计算。
12、在一些实施例中,根据延迟时长校准第一中间轨迹数据和第二中间轨迹数据之后,还包括:对第一中间轨迹数据和第二中间轨迹数据进行滤波处理。
13、在一些实施例中,根据第一同步轨迹数据和第二同步轨迹数据计算多面体控制器的操作轨迹,包括:计算第一同步轨迹数据和第二同步轨迹数据的矢量差,作为多面体控制器的操作轨迹。
14、在一些实施例中,根据操作轨迹确定待操作指令,包括:根据操作轨迹确定与操作轨迹对应的交互动作;根据当前的交互动作,以及交互动作与待操作指令之间的映射关系确定待操作指令。
15、本申请提供一种控制装置,包括一个或多个处理器,用于实现上述的多面体控制器的控制方法。
16、本申请提供一种车辆,包括上述的控制装置。
17、本申请实施例提供的多面体控制器的控制方法、控制装置和车辆,在通过多面体控制器控制车辆内的设备的情况下,根据多面体控制器的第一运动轨迹数据和车辆的第二运动轨迹数据确定多面体控制器的操作轨迹,以根据该操作轨迹确定用于控制车辆的待操作指令,有利于避免将车辆的运动情况误判为多面体控制器的操作轨迹,从而有效避免待操作指令认定错误的情况,进而提升车辆应用场景下,多面体控制器控制过程的准确性。
技术特征:1.一种多面体控制器的控制方法,其特征在于,包括:
2.根据权利要求1所述的控制方法,其特征在于,所述根据所述第一运动轨迹数据和所述第二运动轨迹数据,确定所述多面体控制器的操作轨迹,包括:
3.根据权利要求2所述的控制方法,其特征在于,对所述第一运动轨迹数据和所述第二运动轨迹数据进行时间同步,包括:
4.根据权利要求3所述的控制方法,其特征在于,所述通过设定算法计算得到所述第一中间轨迹数据和所述第二中间轨迹数据之间的延迟时长,包括:
5.根据权利要求4所述的控制方法,其特征在于,通过第一设定算法和第二设定算法得到所述第一中间轨迹数据和所述第二中间轨迹数据之间的延迟时长,包括:
6.根据权利要求5所述的控制方法,其特征在于,所述判断所述第一延迟时长是否满足稳定性要求,包括:
7.根据权利要求4至6任一项所述的控制方法,其特征在于,所述第一设定算法包括互相关函数算法;
8.根据权利要求7所述的控制方法,其特征在于,所述确定使所述互相关函数的函数值最大的时长为所述延迟时长,包括:
9.根据权利要求4至6任一项所述的控制方法,其特征在于,所述第二设定算法包括动态时间规整算法;
10.根据权利要求3所述的控制方法,其特征在于,所述对所述第一运动轨迹数据和所述第二运动轨迹数据进行降噪处理,包括:
11.根据权利要求3所述的控制方法,其特征在于,所述根据所述延迟时长校准所述第一中间轨迹数据和所述第二中间轨迹数据之后,还包括:
12.根据权利要求2所述的控制方法,其特征在于,所述根据所述第一同步轨迹数据和所述第二同步轨迹数据确定所述多面体控制器的操作轨迹,包括:
13.根据权利要求1所述的控制方法,其特征在于,所述根据所述操作轨迹确定待操作指令,包括:
14.一种控制装置,其特征在于,包括一个或多个处理器,用于实现如权利要求1-13中任一项所述的多面体控制器的控制方法。
15.一种车辆,其特征在于,包括如权利要求14所述的控制装置。
技术总结本申请提供一种多面体控制器的控制方法、控制装置和车辆。该控制方法包括:获得多面体控制器的第一运动轨迹数据和与多面体控制器电连接的车辆的第二运动轨迹数据。根据第一运动轨迹数据和第二运动轨迹数据,确定多面体控制器的操作轨迹;根据操作轨迹确定待操作指令,以实现对车辆的控制。在通过多面体控制器控制车辆内的设备的情况下,根据多面体控制器的第一运动轨迹数据和车辆的第二运动轨迹数据确定多面体控制器的操作轨迹,以根据该操作轨迹确定用于控制车辆的待操作指令,有利于避免将车辆的运动情况误判为多面体控制器的操作轨迹,从而有效避免待操作指令认定错误的情况,进而提升车辆场景下,多面体控制器控制过程的准确性。技术研发人员:王骁受保护的技术使用者:浙江吉利控股集团有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/149217.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表