一种通信铁塔智能巡检无人机装置
- 国知局
- 2024-07-30 09:22:31
本发明涉及通信铁塔智能巡检,尤其涉及一种通信铁塔智能巡检无人机装置。
背景技术:
1、传统的通信铁塔维护均是通过技术人员进行到现场检查,常规巡检一般由工作人员携带专业仪器,通过地面巡视、登塔检查等方式检查是否存在安全隐患。但是由于通信铁塔一般处于不同的地点,有些处于楼顶,有些处于山顶,会使得巡检费时费力,常常人工爬上一个铁塔就要一个上午的时间进行查看和维护,同时人工在对铁塔维护时,无法360度无死角查看和检测,使得铁塔出现一些隐藏的安全隐患时,人工无法及时发现。因此,需要设计一种更加快捷,更加高效,能够才能够从任何角度对铁塔进行检测和查看的智能巡检无人机装置。
技术实现思路
1、本发明的目的在于提供一种通信铁塔智能巡检无人机装置,解决现有人工巡检铁塔费时费力,还无法全面检查铁塔的每个角落,存在一些隐藏的安全隐患无法发现的技术问题。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种通信铁塔智能巡检无人机装置,包括无人机自动起停装置和无人机,无人机设置在无人机自动起停装置上,无人机在无人机自动起停装置上自动起飞和自动停机,同时无人机自动起停装置对无人机进行自动充电,无人机自动获取外部的传入的通信铁塔的数据信息和自动获取天气信息,无人机进行对新建通信铁塔和原有的铁塔进行根据天气数据自动选定巡检时间,并对巡检路线方案进行规划。
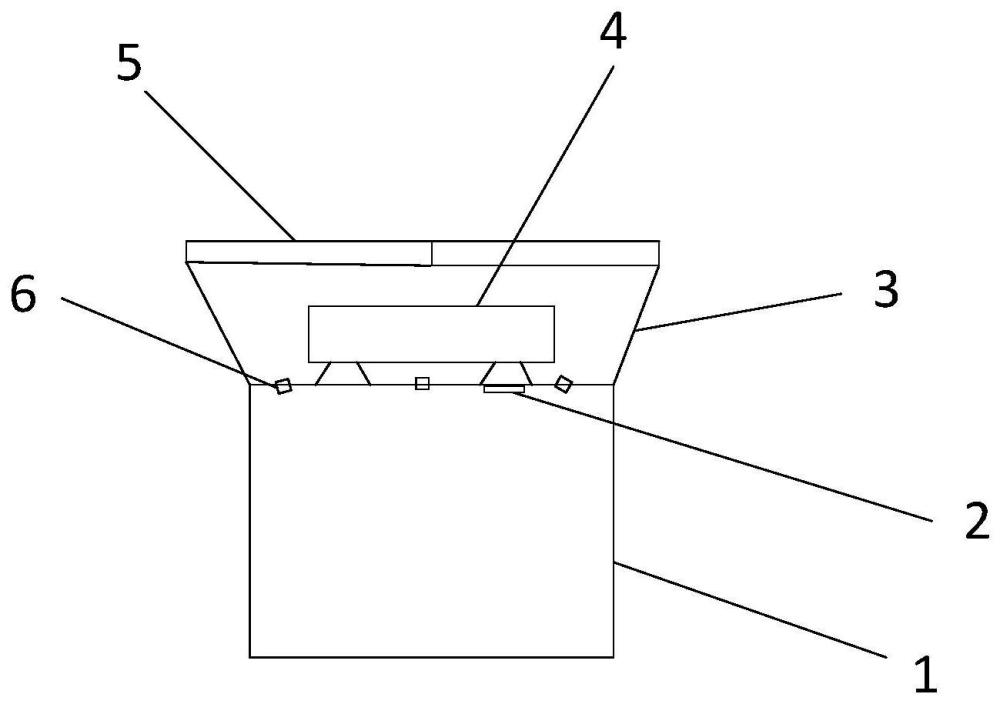
4、进一步地,无人机自动起停装置包括无人机停机平台、无线充电台、旋转杆、无人机上盖板和激光定位发射单元,无线充电台和激光定位发射单元均设置在无人机停机平台顶部的平台上,旋转杆一端设置在无人机停机平台的侧边,无人机上盖板设置在旋转杆的另一端,无人机上盖板设置在无人机停机平台的正上方,无人机设置在无人机停机平台上,并在无人机上盖板的底部,无人机上盖板对无人机进行遮挡。
5、进一步地,激光定位发射单元包括中心激光发射灯和侧边圆形发射灯,中心激光发射灯设置在无人机停机平台的正中心位置,侧边圆形发射灯设置在中心激光发射灯的侧边,侧边圆形发射灯向外倾斜设置,侧边圆形发射灯发射的激光与中心激光发射灯发射的激光夹角不大于30度。
6、进一步地,无人机根据中心激光发射灯发射的竖直激光线与侧边圆形发射灯发射的圆形散射光线进行寻找无人机停机平台的正中心位置,当无人机感应到有激光光线时,无人机进行姿势调整,把自己位置调整为水平状态,然后检测接收的激光光线是竖直光线还是倾斜光线,如果检测的为倾斜光线,判断倾斜光线的倾斜方向,然后往射线光线方向平移,直到找到竖直激光光线,然后无人机沿着竖直激光光线向下竖直降落,即可完成自动降落。
7、进一步地,无人机(4)包括无人机本体和无人机巡检控制装置,无人机巡检控制装置设置在无人机本体上,无人机巡检控制装置包括铁塔数据获取模块、铁塔模型生成模块、铁塔巡航规划模块、天气数据获取模块、定位模块、视频获取模块、红外摄像头模块、无线通信模块、螺丝生锈破损识别模块、铁塔支架裂缝检测模块、控制器模块、无线充电模块和激光接收定位模块,铁塔数据获取模块经铁塔模型生成模块与铁塔巡航规划模块连接,铁塔巡航规划模块、天气数据获取模块、定位模块、视频获取模块、红外摄像头模块、无线通信模块、螺丝生锈破损识别模块、铁塔支架裂缝检测模块、无线充电模块和激光接收定位模块均与控制器模块连接;
8、铁塔数据获取模块用于自动从铁塔维护中心获取新建铁塔和已有铁塔具体数据,铁塔模型生成模块用于根据获取的铁塔数据进行生成铁塔实物模型图,并对铁塔实物模型进行数据坐标标定,选定起始坐标点,然后将起始坐标点作为巡塔起始点,铁塔巡航规划模块根据铁塔实物模型和数据坐标进行规划铁塔的巡检路线,然后把巡检路线传给控制器模块,巡检路线包括铁塔与铁塔支架之间巡检的先后路线和铁塔内部的结构细化巡检路线,天气数据获取模块用于实时获取天气预报的数据,然后根据天气预报数据进行规划巡检的路线,定位模块用于对无人机进行实时定位,无线通信模块用于将巡检的数据信息和视频信息传给铁塔维护中心,螺丝生锈破损识别模块用于针对螺丝位置进行识别,然后判断螺丝是否生锈和是否破损,根据铁塔新时的部件数据进行外管识别对比,确保铁塔的所有螺丝均是无破损情况,出现生锈的螺丝,通知维护中心,铁塔支架裂缝检测模块用于识别铁塔的钢架是否出现裂缝,无线充电模块用于对无人机的电池进行无线充电,在无人机停在无人机停机平台上时,自动充电,激光接收定位模块用于接收激光,并判定激光的倾斜角和具体光源的位置。
9、进一步地,铁塔内部的结构细化巡检路线规划过程为,以铁塔的三维坐标为基础,以两点坐标为路线,在两个坐标点之间,也就是两个钢板连接处进行上下左右移动检查螺丝,首先从铁塔的底部开始,然后以水平钢板为旋转圈检查,两个旋转圈之间连接的钢板为目标,无人机根据目标移动检查,当移动到旋转圈的位置是,进行下一个目标检查,检查完两个旋转圈之间的目标后,进行上上去检查上面的一个旋转圈,然后一次检查两个旋转圈的目标,直到检查完所有目标,最后对顶部或者侧边的基站进行循环检查,检查时间进行设定。
10、进一步地,红外摄像头模块通过照射发射基站的整体温度,包括表面器件和表面电路板的温度,然后来进行判断发射基站是否出现故障和预测下一个时间是否出现故障,实现故障提前预测。
11、本发明由于采用了上述技术方案,具有以下有益效果:
12、本发明可以实现对所有不同类型的铁塔进行详细的巡检路线的规划,同时实现对每一块连接钢架进行检查,不过错过任何一块连接钢架和螺丝,这是人工所无法做到的,同时实现铁塔模型自动生成,自动规划不需要人为参与,实现对基站故障和未来出现的故障进行预测,实现铁塔自动巡检。
技术特征:1.一种通信铁塔智能巡检无人机装置,其特征在于:包括无人机自动起停装置和无人机(4),无人机(4)设置在无人机自动起停装置上,无人机(4)在无人机自动起停装置上自动起飞和自动停机,同时无人机自动起停装置对无人机进行自动充电,无人机(4)自动获取外部的传入的通信铁塔的数据信息和自动获取天气信息,无人机(4)进行对新建通信铁塔和原有的铁塔进行根据天气数据自动选定巡检时间,并对巡检路线方案进行规划。
2.根据权利要求1所述的一种通信铁塔智能巡检无人机装置,其特征在于:无人机自动起停装置包括无人机停机平台(1)、无线充电台(2)、旋转杆(3)、无人机上盖板(5)和激光定位发射单元(6),无线充电台(2)和激光定位发射单元(6)均设置在无人机停机平台(1)顶部的平台上,旋转杆(3)一端设置在无人机停机平台(1)的侧边,无人机上盖板(5)设置在旋转杆(3)的另一端,无人机上盖板(5)设置在无人机停机平台(1)的正上方,无人机(4)设置在无人机停机平台(1)上,并在无人机上盖板(5)的底部,无人机上盖板(5)对无人机(4)进行遮挡。
3.根据权利要求2所述的一种通信铁塔智能巡检无人机装置,其特征在于:激光定位发射单元(6)包括中心激光发射灯和侧边圆形发射灯,中心激光发射灯设置在无人机停机平台(1)的正中心位置,侧边圆形发射灯设置在中心激光发射灯的侧边,侧边圆形发射灯向外倾斜设置,侧边圆形发射灯发射的激光与中心激光发射灯发射的激光夹角不大于30度。
4.根据权利要求3所述的一种通信铁塔智能巡检无人机装置,其特征在于:无人机(4)根据中心激光发射灯发射的竖直激光线与侧边圆形发射灯发射的圆形散射光线进行寻找无人机停机平台(1)的正中心位置,当无人机感应到有激光光线时,无人机(4)进行姿势调整,把自己位置调整为水平状态,然后检测接收的激光光线是竖直光线还是倾斜光线,如果检测的为倾斜光线,判断倾斜光线的倾斜方向,然后往射线光线方向平移,直到找到竖直激光光线,然后无人机(4)沿着竖直激光光线向下竖直降落,即可完成自动降落。
5.根据权利要求1所述的一种通信铁塔智能巡检无人机装置,其特征在于:无人机(4)包括无人机本体和无人机巡检控制装置,无人机巡检控制装置设置在无人机本体上,无人机巡检控制装置包括铁塔数据获取模块、铁塔模型生成模块、铁塔巡航规划模块、天气数据获取模块、定位模块、视频获取模块、红外摄像头模块、无线通信模块、螺丝生锈破损识别模块、铁塔支架裂缝检测模块、控制器模块、无线充电模块和激光接收定位模块,铁塔数据获取模块经铁塔模型生成模块与铁塔巡航规划模块连接,铁塔巡航规划模块、天气数据获取模块、定位模块、视频获取模块、红外摄像头模块、无线通信模块、螺丝生锈破损识别模块、铁塔支架裂缝检测模块、无线充电模块和激光接收定位模块均与控制器模块连接;
6.根据权利要求5所述的一种通信铁塔智能巡检无人机装置,其特征在于:铁塔内部的结构细化巡检路线规划过程为,以铁塔的三维坐标为基础,以两点坐标为路线,在两个坐标点之间,也就是两个钢板连接处进行上下左右移动检查螺丝,首先从铁塔的底部开始,然后以水平钢板为旋转圈检查,两个旋转圈之间连接的钢板为目标,无人机根据目标移动检查,当移动到旋转圈的位置是,进行下一个目标检查,检查完两个旋转圈之间的目标后,进行上上去检查上面的一个旋转圈,然后一次检查两个旋转圈的目标,直到检查完所有目标,最后对顶部或者侧边的基站进行循环检查,检查时间进行设定。
7.根据权利要求6所述的一种通信铁塔智能巡检无人机装置,其特征在于:红外摄像头模块通过照射发射基站的整体温度,包括表面器件和表面电路板的温度,然后来进行判断发射基站是否出现故障和预测下一个时间是否出现故障,实现故障提前预测。
技术总结本发明提供一种通信铁塔智能巡检无人机装置,属于通信铁塔智能巡检技术领域,包括无人机自动起停装置和无人机,无人机设置在无人机自动起停装置上,无人机在无人机自动起停装置上自动起飞和自动停机,同时无人机自动起停装置对无人机进行自动充电,无人机自动获取外部的传入的通信铁塔的数据信息和自动获取天气信息,无人机进行对新建通信铁塔和原有的铁塔进行根据天气数据自动选定巡检时间,对巡检路线方案进行规划。可以实现对所有不同类型的铁塔进行详细的巡检路线的规划,同时实现对每一块连接钢架进行检查,不过错过任何一块连接钢架和螺丝,这是人工所无法做到的,同时实现铁塔模型自动生成,自动规划不需要人为参与,实现对基站故障和未来出现的故障进行预测,实现铁塔自动巡检。技术研发人员:黄菁受保护的技术使用者:广西现代职业技术学院技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/149243.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表