一种多差速单元底盘的全向运行控制方法与流程
- 国知局
- 2024-07-30 09:22:55
本发明涉及车辆控制,更具体地说,涉及一种多差速单元底盘的全向运行控制方法。
背景技术:
1、移动机器人全向底盘多数为两舵轮或四舵轮,舵轮的转向角和速度为完全解耦的,角度控制较简单。而差速单元每个驱动单元的角度控制和速度控制是耦合在一起,相互影响的,需要更复杂的解算方法。
2、经检索现有公开号为cn111930126a12的专利文献提供一种基于差速轮组agv的导航纠偏方法,该方法中通过导航磁条的偏移量与导航偏移角计算个差速轮组的目标速度以及偏航角,并计算各差速轮组左右驱动轮的目标速度以及目标角速度。
3、由于差速轮组内左右驱动轮之间的角度控制与速度控制是耦合在一起的,而上述技术方案中,仅对差速轮组内左右驱动轮的目标角速度进行调节,并没有考虑左右驱动轮在进行角度旋转过程中,造成左右驱动轮线速度上的差异,会导致左右驱动轮转速不匹配,造成轮胎打滑、扭矩分配不均匀的情况发生。
4、为了解决具有差速单元的车辆在转动过程中,差速单元内部左右驱动轮的速度控制,避免出现轮胎打滑以及扭矩分配不均匀的问题,我们提出一种多差速单元底盘的全向运行控制方法。
技术实现思路
1、本发明的目的在于提供一种多差速单元底盘的全向运行控制方法,以解决上述背景技术中提出的问题。
2、本发明是通过以下技术方案实现的:
3、一种多差速单元底盘的全向运行控制方法,包括以下步骤:
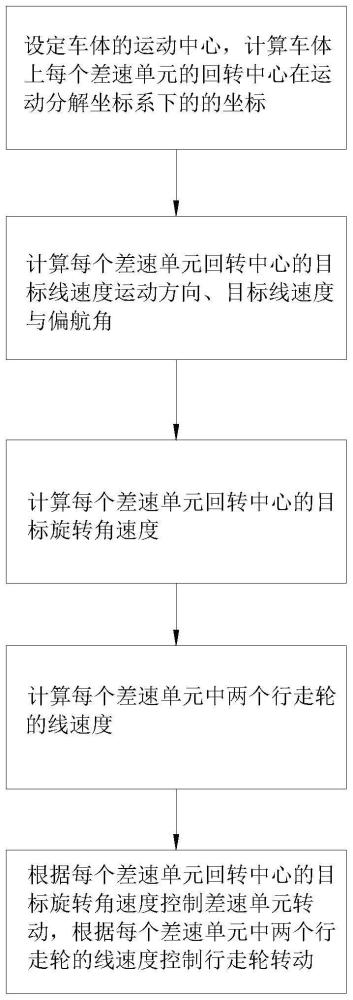
4、s1、设定车体的运动中心,以车体的运动中心为原点、前进方向为x轴正方向建立运动分解坐标系,计算车体上每个差速单元的回转中心在运动分解坐标系下的坐标;
5、s2、根据设定的车体运动中心的目标线速度运动方向、目标线速度与目标旋转角速度与差速单元回转中心的坐标,计算每个差速单元回转中心的目标线速度运动方向、目标线速度与偏航角;
6、s3、根据差速单元回转中心的偏航角与车体运动中心的目标旋转角速度,计算每个差速单元回转中心的目标旋转角速度;
7、s4、根据差速单元回转中心的目标线速度、目标旋转角速度,计算每个差速单元中左右两个行走轮的线速度;
8、s5、根据每个差速单元回转中心的目标旋转角速度控制差速单元转动,根据每个差速单元中两个行走轮的线速度控制行走轮转动。
9、作为本申请文件技术方案的一种可选方案,在s2中,每个差速单元的目标线速度运动方向、目标线速度与偏航角的计算公式如下:
10、
11、
12、
13、δt=t-tp;
14、其中vx,vy,va为设定的车体运动中心在运动分解坐标系内坐标x方向,y方向的目标线速度和绕原点旋转的目标旋转角速度;
15、dx,dy分别为差速单元回转中心在运动分解坐标系的坐标x方向,y方向上的坐标;
16、vpx,vpy为差速驱动单元回转中心在运动分解坐标系的坐标x方向,y方向的目标线速度;
17、vp为差速单元回转中心的目标线速度;
18、tp为差速单元回转中心的目标线速度方向;
19、t为差速单元回转中心当前的线速度方向;
20、δt为差速单元回转中心的偏航角。
21、作为本申请文件技术方案的一种可选方案,在s2中,所述差速单元回转中心的目标线速度方向存在两解的情况下,以使得差速单元回转中心的偏航角最小为限定条件,确定差速单元回转中心的目标线速度方向。
22、作为本申请文件技术方案的一种可选方案,在s3中,差速单元回转中心的目标旋转角速度采用如下公式计算:
23、vpa=va+ωp;
24、ωp=αkp*δt+βki∫δtdt;
25、vpa为差速驱动单元绕回转中心旋转的目标旋转角速度;
26、ωp为差速驱动单元绕回转中心旋转的补偿角速度,以逆时针方向为正;
27、kp为比例增益,取值范围在0.02~0.3之间;ki为积分增益,取值在0.5~3之间;α为比例项的调整系数;β为积分项的调整系数。
28、作为本申请文件技术方案的一种可选方案,在s4中,差速单元中两个行走轮的线速度的计算公式如下:
29、
30、其中,vl,vr分别为该差速单元中左侧行走轮与右侧行走轮的线速度,l为该差速单元中左右两个行走轮之间的间距。
31、作为本申请文件技术方案的一种可选方案,在s3中,比例项的调整系数α采用如下公式计算:
32、
33、其中,kα为比例基础系数,取值在0.5~3之间;vmin为比例基础的反比例系数,取值为0.2~0.4倍的整车最大速度。
34、作为本申请文件技术方案的一种可选方案,在s3中,积分项的调整系数β采用如下公式计算:
35、
36、其中,βmin为基础调整系数,取值为1;kβ为积分项系数,取值在0.1~0.5之间;e为积分分离阈值,取值为0.3rad。
37、作为本申请文件技术方案的一种可选方案,在步骤3中,βki∫δtdt大于设定的积分上限时,积分项βki∫δtdt不再积分,取值为设定的积分上限。
38、作为本申请文件技术方案的一种可选方案,在步骤3中,车体线速度为0时,差速驱动单元绕回转中心旋转的补偿角速度采用如下公式计算:
39、
40、ωt=αkp*δt+βki∫δtdt;
41、其中,aa为加速度,ad为减速度。
42、作为本申请文件技术方案的一种可选方案,所述车体的运动中心为车体上任意一点。
43、与现有技术相比,本发明的有益效果是:
44、1.本申请通过考虑差速单元左右驱动轮的角度控制与速度控制的耦合关系,在对差速单元的左右驱动轮进行角度控制的同时,将角度控制产生的线速度差异附加在左右驱动轮线速度控制的基础上,解决了现有技术中具有差速单元的车辆在转动过程中,差速单元的左右驱动轮扭矩分配不均匀的问题。
45、2.本申请采用的解算方法,可以指定任意一点作为运动中心,不受轮系布局的限制,所有差速单元的计算公式一样,无需区分安装位置和运动方向,无复杂计算公式,对编程及控制器性能要求很低。
46、3.本申请采用比例积分控制差速单元的转动角速度,当差速单元的速度较低时,差速单元能快速响应;当差速单元的速度较高时,能够避免差速单元角度调整量过大引起车体的晃动过大。
47、4.本申请在差速单元线速度为零时,采用斜坡函数对角速度进行平滑,能够有效防止突变的角速度对机械结构产生较大的冲击。
48、5.本申请通过引入抗积分饱和上限,能够解决角速度在正负频繁波动时,导致对反向的目标值响应速度降低的技术问题。
技术特征:1.一种多差速单元底盘的全向运行控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的多差速单元底盘的全向运行控制方法,其特征在于:在s2中,每个差速单元的目标线速度运动方向、目标线速度与偏航角的计算公式如下:
3.根据权利要求2所述的多差速单元底盘的全向运行控制方法,其特征在于:在s2中,所述差速单元回转中心的目标线速度方向存在两解的情况下,以使得差速单元回转中心的偏航角最小为限定条件,确定差速单元回转中心的目标线速度方向。
4.根据权利要求2所述的多差速单元底盘的全向运行控制方法,其特征在于:在s3中,差速单元回转中心的目标旋转角速度采用如下公式计算:
5.根据权利要求4所述的多差速单元底盘的全向运行控制方法,其特征在于:在s4中,差速单元中两个行走轮的线速度的计算公式如下:
6.根据权利要求4所述的多差速单元底盘的全向运行控制方法,其特征在于:在s3中,比例项的调整系数α采用如下公式计算:
7.根据权利要求4所述的多差速单元底盘的全向运行控制方法,其特征在于:在s3中,积分项的调整系数β采用如下公式计算:
8.根据权利要求4所述的多差速单元底盘的全向运行控制方法,其特征在于:在步骤3中,βki∫δtdt大于设定的积分上限时,积分项βki∫δtdt不再积分,取值为设定的积分上限。
9.根据权利要求4所述的多差速单元底盘的全向运行控制方法,其特征在于:在步骤3中,车体线速度为0时,差速驱动单元绕回转中心旋转的补偿角速度采用如下公式计算:
10.根据权利要求1所述的多差速单元底盘的全向运行控制方法,其特征在于:所述车体的运动中心为车体上任意一点。
技术总结本发明公开了一种多差速单元底盘的全向运行控制方法,属于车辆控制技术领域。一种多差速单元底盘的全向运行控制方法,包括设定车体的运动中心,计算车体上每个差速单元的回转中心在运动分解坐标系下的坐标;计算每个差速单元回转中心的目标线速度运动方向、目标线速度与偏航角;计算每个差速单元回转中心的目标旋转角速度;计算每个差速单元中左右两个行走轮的线速度;根据每个差速单元回转中心的目标旋转角速度控制差速单元转动,根据每个差速单元中两个行走轮的线速度控制行走轮转动;解决了现有技术中具有差速单元的车辆在转动过程中,差速单元的左右驱动轮扭矩分配不均匀的问题。技术研发人员:陈博,咸龙滨,杨秀军,杨海波,杨桂成,李瑞伟受保护的技术使用者:临沂临工智能信息科技有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240730/149286.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表