一种民机飞控系统集成测试方法及系统与流程
- 国知局
- 2024-07-30 09:23:13
本发明属于试验试飞,特别涉及一种民机飞控系统集成测试方法及系统。
背景技术:
1、随着现代飞行器的发展,对飞机功能、性能和安全性等要求也越来越高,而飞行控制系统作为飞机的安全关键系统,其安全性及可靠性直接影响到飞机的安全。飞行控制系统通过对采集到的大量传感器信号进行处理分析、逻辑解算,实现对飞机各舵面的控制、故障信息存储、与航电或其他系统交联等功能。
2、由于飞行控制系统功能逻辑的复杂度不断提高,在保证其安全性和可靠性的前提下,对重要级别的系统功能及系统逻辑的测试验证能力也提出了较高的要求,即测试验证过程应能够提供证明系统满足高安全、高可靠要求的符合性证据,实现对飞控系统需求的充分测试和验证。但是目前的系统测试验证方法的实现过程存在以下局限性:一、受测试验证环境能力和系统可测试性的限制,集成后系统的软硬件测试点无法满足对需求的充分验证;二、为满足对系统需求的完整验证,系统集成测试往往测试条目、用例数量巨大,当前测试过程很大程度需要测试人员进行人工记录和判断,对系统测试人员的能力要求高,测试效率、结果准确性、可靠性与测试人员的水平、经验强相关,再考虑到留给系统测试验证的时间不足,靠人工测试无法满足完整验证的要求。
技术实现思路
1、为了解决相关技术无法满足系统集成测试要求的问题,本发明提供一种民机飞控系统集成测试方法及系统,能够实现飞控系统需求充分性、完整性的自动化测试和验证;减少人工测试操作步骤,减少测试人员的工作负担,提高测试效率及正确率;生成的一套通用的民机飞控系统测试试验环境,能提高系统级功能测试验证的质量和可靠性。所述技术方案如下:
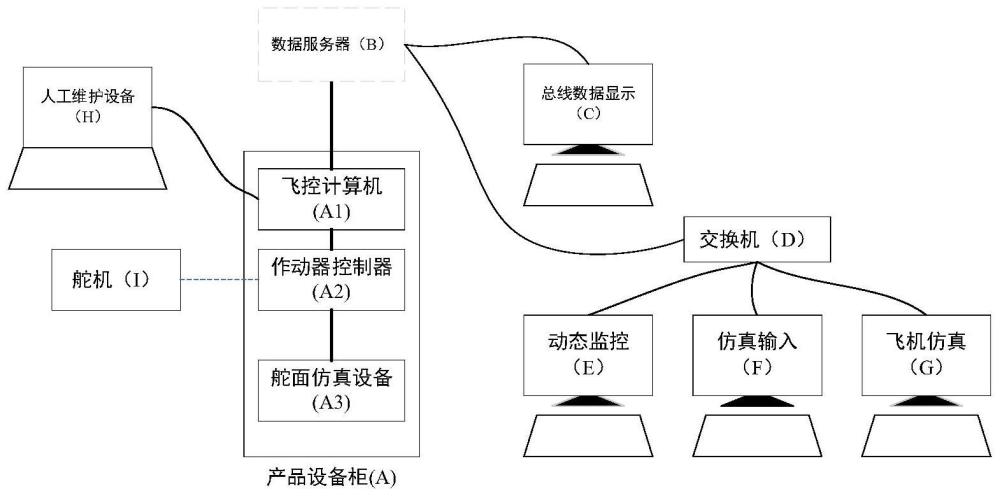
2、第一方面,提供一种民机飞控系统集成测试系统,包括:飞控计算机a1、作动器控制器a2、数据服务器b、总线数据显示设备c、动态监控设备e、仿真输入设备f、维护设备h、舵机i、舵面仿真设备a3,
3、其中,飞控计算机a1与作动器控制器a2、数据服务器b、维护设备h连接;作动器控制器a2与数据服务器b、舵机i连接;数据服务器b与总线数据显示设备c连接;舵面仿真设备a3与作动器控制器a2、数据服务器b连接;
4、飞控计算机a1生成控制指令,并将控制指令下发至作动器控制器a2和数据服务器b;同时读取维护设备h中存储的调零数据值;
5、作动器控制器a2用于接收经数据服务器b转换处理后的输入模拟信号,并将这些信号上传至飞控计算机a1中;同时将飞控计算机a1下发的控制指令发送至舵面仿真设备a3;
6、总线数据显示设备c用于读取数据服务器b中的参数并进行显示;
7、动态监控设备e用于获取数据服务器b中的参数;
8、仿真输入设备f用于将模拟驾驶员操作的信号输入至作动器控制器a2,或通过数据服务器b修改真实飞机中与飞控计算机a1交联设备的数据;
9、舵机i用于接收来自作动器控制器a2的控制信号,并根据该控制信号控制飞机舵面运动。
10、其中,输入模拟信号包括驾驶杆、盘、脚蹬信号,
11、作动器控制器a2用于将输入模拟信号处理后上传至飞控计算机a1中;同时接收飞控计算机a1下发的控制指令,并将控制指令经数据服务器b转换处理后发送至舵面仿真设备a3。
12、其中,真实飞机中与飞控计算机a1交联设备的数据包括航电、大气、无线电高度。
13、进一步地,所述系统还包括:交换机d,
14、交换机d与动态监控设备e、仿真输入设备f、数据服务器b连接;
15、动态监控设备e通过交换机d获取数据服务器b中的参数;
16、仿真输入设备f用于通过交换机d将模拟驾驶员操作的信号输入至作动器控制器a2中。
17、进一步地,所述系统还包括:飞机仿真设备g,飞机仿真设备g与交换机d连接,
18、舵面仿真设备a3接收经数据服务器b转换处理后的控制指令并按照指令作出对应的响应;同时将仿真出的舵面状态数据上传至数据服务器b;
19、飞机仿真设备g通过交换机d接收数据服务器b中飞控计算机a1及作动器控制器a2解算发送的控制指令,以及舵面仿真设备a3的舵面位置,并将接收到的数据输入飞机仿真设备g中的飞机方程内,模拟飞机的真实姿态,同时将姿态数据通过交换机d及数据服务器b实时回传给飞控计算机a1及作动器控制器a2,达到闭环控制仿真的目的。
20、第二方面,提供一种民机飞控系统集成测试方法,用于如第一方面中所述的民机飞控系统集成测试系统,所述方法包括:
21、步骤1:编写系统功能测试大纲;
22、步骤2:按照编写的系统功能测试大纲设计测试用例,编写python脚本;
23、步骤3:在仿真输入设备f中运行编写的python脚本,每一个测试循环过程如下:
24、s301:仿真输入设备f运行测试脚本,由仿真输入设备f生成相应的一个操作指令,并传输至数据服务器b;
25、s302:在数据服务器b中对操作指令进行d/a转换,将转换后的操作指令发送至作动器控制器a2;
26、s303:经过飞控计算机a1或作动器控制器a2的运算后生成此操作指令对应的控制指令,将该控制指令通过动器控制器a2发送至舵机i,驱动舵面进行运动;
27、s304:在s301~s303的过程中,测试脚本根据步骤1中系统功能测试大纲的需求,抓取执行操作指令后飞控计算机a1及作动器控制器a2中可反馈系统功能运行情况的试验数据,并将其与通过计算得到的理论指令数据进行对比;
28、步骤4:测试脚本将步骤2中设置的所有测试用例按照步骤3执行一遍,并基于所有测试结果生成目标文件,实现针对民机飞控系统功能自动化测试的目的。
29、可选地,步骤1中,设计针对产品功能、安全性验证的测试项目及测试步骤,采用如下顺序进行测试:
30、确认系统启动状态并检查系统能否进行正常的模式切换;
31、控制功能测试;
32、故障处理与告警功能测试;
33、驾驶舱操纵机构脱开故障处理;
34、监控与表决功能测试。
35、第三方面,提供一种民机飞控系统集成测试方法,其特征在于,用于如第一方面中所述的民机飞控系统集成测试系统,所述方法包括:
36、步骤1:在仿真输入设备f中编写闭环控制律测试脚本;
37、步骤2:在仿真输入设备f中运行编写的闭环控制律测试脚本,每一个测试循环过程如下:
38、s201:仿真输入设备f运行测试脚本,由仿真输入设备f生成相应的一个操作指令,将选取的飞机状态点输入至飞机仿真设备g中的飞机仿真模型,启动该状态点下的飞机模型;
39、s202:启动飞机模型后,测试脚本启动仿真输入设备f中的飞行参数记录程序;
40、s203:飞行参数记录程序启动后,仿真输入设备f中的测试脚本生成相应的操作指令,并传输至数据服务器b;
41、s204:数据服务器b对操作指令进行d/a转换,将转换后的操作指令发送至作动器控制器a2;
42、s205:经过飞控计算机a1或作动器控制器a2的运算后生成此操作指令对应的控制指令,将该控制指令通过动器控制器a2发送至舵机i,驱动舵面进行运动;
43、s206:舵机i运动后,舵机内部传感器采集到位置信号,将该位置信号发送至仿真输入设备f,飞行参数记录程序计算出此时的飞机舵面,并将舵面结果输入至飞机仿真设备g中,此时飞机的姿态将发生改变;
44、s207:当测试脚本中的操作指令结束时,测试脚本将关闭本状态点下飞机仿真设备g中的飞机方程,并结束仿真输入设备f中的飞行参数记录程序,将测试环境恢复至初始状态;
45、s208:在s203~s206的过程中,仿真输入设备f中的飞行参数记录程序一直记录飞机的姿态信息,直到s207飞行参数记录程序被关闭,记录将停止;
46、步骤3:测试脚本将步骤1中选取的所有飞行状态按照步骤2执行一遍,并基于所有闭环控制律试验结果生成目标文件;
47、步骤4:将步骤3中的闭环控制律试验结果同桌面仿真的控制律理论结果进行对比,并形成试验报告。
48、本发明的有益效果至少在于:
49、1、针对难以通过实物注入的测试前置条件(二次、三次故障等)或一些“关重”功能的测试,实现脚本输入/输出数据全面覆盖;
50、2、实现民机飞控系统通用系统测试环境的搭建,保证测试验证的完整性和充分性;
51、3、减少了测试人员的工作负担,提高了测试效率及正确率;
52、4、可移植性强,可应用于多个民机飞控系统课题的系统集成测试及验证;
53、5、提高了系统测试验证的质量和可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149310.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表