一种荧光原位杂交设备的快速精确控温方法与流程
- 国知局
- 2024-07-30 09:26:16
本发明属于温度控制,涉及一种快速精确控温方法,尤其涉及一种荧光原位杂交设备的快速精确控温方法。
背景技术:
1、荧光原位杂交(fluorescence in situ hybridization,fish)是在放射性原位杂交技术的基础上发展起来的一种分子检测技术,具有安全、快速、灵敏度高、能同时显示多种颜色等优点。fish主要应用于实体肿瘤诊断、血液肿瘤诊断和产前染色体筛查三个领域,是这几个领域内检测的金标准。其中肿瘤诊断的主要用途是个性化诊断,具体的是伴随诊断、用药指导和预后判断;产前筛查的主要用途是检测胎儿的遗传缺陷。
2、杂交温度对fish检测结果影响很大,甚至可以决定杂交信号的有无。一般的荧光原位杂交技术(fluorescence in situ hybridization,fish)操作流程依次如下:前处理:脱蜡→高温煮片→低温洗涤→酶消化→室温洗涤→脱水、杂交变性(高温保持、次高温保持)、杂交后洗涤(低温洗涤、次高温洗涤、再低温洗涤)。在上述过程中,要求的温度均不相同,基本是室温(15-25℃)至高温(约90℃),中间涉及到低温(约37℃)、次高温(约45℃)多次升、降温,且要求温度控制精度在±0.5℃以内,否则都会容易导致检测结果出现误差。
3、目前现有的荧光原位杂交设备,如安必平lbp-6612全自动玻片处理系统,反应舱控温精度为±2℃;sh2000原位杂交仪,对温度控制通常只能达到±1℃,温度控制精度难以满足荧光原位杂交精确检测需求。
4、因此急需找到一种针对荧光原位杂交设备的更加精准的温度控制方法,从而提高荧光原位杂交设备的检测精度。
技术实现思路
1、为解决现有技术中存在的问题,本发明提供了一种荧光原位杂交设备的快速精确控温方法,通过pid算法,采用双闭环控制,其中第一闭环由每一个时刻的孵育槽内液体的目标温度与孵育槽内液体实际测得温度的差值控制,第二闭环由每一个时刻的孵育槽底部铝块的目标温度与孵育槽底部铝块实际测得温度的差值控制,再结合计算当前时刻、上一时刻与上上时刻的温度差值,并摸索出最佳的比例系数、积分系数和微分系数,获得双闭环pid算法公式,控制频率为20hz,可以实现荧光原位杂交设备的温度控制精度达到±0.3℃,进一步降低荧光原位杂交设备的检测误差,提升在分子检测领域的应用潜力,具有广泛的应用前景。
2、一方面,本发明提供了一种快速精确控温方法,所述控温方法主要通过双闭环控制的pid算法,计算温度控制器的输出功率变化量,按照该变化量调节温度控制器的输出功率,实现孵育槽内液体的快速精确控温;
3、所述双闭环包括第一闭环和第二闭环,第一闭环由每一个时刻的孵育槽内液体的目标温度与孵育槽内液体实际测得温度的差值,来计算孵育槽底部铝块的目标温度变化量;第二闭环由每一个时刻的孵育槽底部铝块的目标温度与孵育槽底部铝块实际测得温度的差值,来计算温度控制器的输出功率变化量。
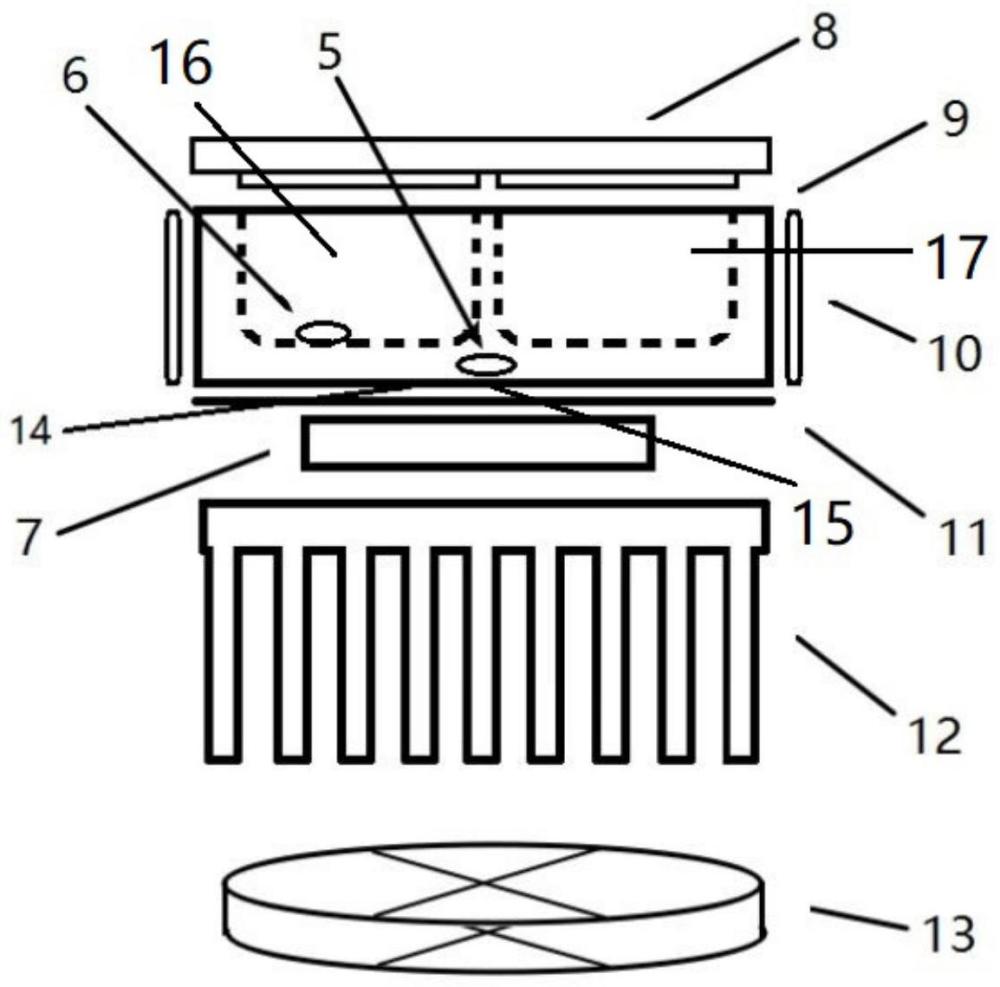
4、荧光原位杂交设备通过温度控制器对孵育槽进行控温,待测样品位于孵育槽内。孵育槽底部铝块位于温度控制器上方,是孵育槽最靠近温度控制器的部位,孵育槽内液体位于孵育槽底部铝块上方。温度控制器可以通过加热或制冷来控制温度,加热或制冷的效果先传导至孵育槽底部铝块,再逐渐传导到孵育槽内部的液体状态的样品,因此从温度控制器传递到孵育槽内液体使其控温存在滞后过程,要实现精准控温,必须实时调控温度控制器的功率,使其确保传递到孵育槽内液体温度恰好精准控制在所需目的温度。
5、为了能够实现孵育槽内液体的精准控温,本发明需要实时检测孵育槽底部铝块的温度和孵育槽内液体的温度,并通过一套pid算法计算出温度控制器的输出功率。
6、需要解释的是,本发明提供的pid算法主要用于控制温度控制器的加热功率,并非控制制冷功率,如需降温,只需开启全功率制冷,降温至所需温度即可,降温后再采用本发明提供的pid算法控制温度控制器的加热功率,确保精确控温。
7、本发明经大量研究证明,相比于仅采用一个闭环的情况,也就是通过孵育槽内液体的目标温度与孵育槽内液体实际测得温度的差值,来计算温度控制器的输出功率,采用两个闭环进行控温时的温度控制精度能显著提高。
8、从温度控制器加热开始,到孵育槽底部铝块开始升温,需要一个传导的时间,然后孵育槽底部铝块传导给孵育槽内液体,又需要一个传导的时间。当仅采用一个闭环时,孵育槽内液体温度低于目标温度时,需要立马去增加温度控制器输出功率,相当于加大火力。但是孵育槽内液体温度不会马上上升,等到孵育槽内液体温度达到目标温度了再去关闭输出,后续孵育槽底部铝块还会继续导热过来,导致孵育槽内液体温度高于目标温度。因此采用一个闭环时,会导致孵育槽内液体温度忽上忽下,波动较大。
9、本身环境温度是低于孵育槽内液体的目标温度的,整个系统会向外部散热,所以孵育槽底部铝块温度需要高于孵育槽内液体温度,通过孵育槽底部铝块导热来保持孵育槽内液体温度。
10、增加第二闭环,就相当于增加了孵育槽底部铝块的目标温度这个假想目标值(t_mb),当孵育槽内液体温度低于目标温度,则需要提升孵育槽底部铝块温度,也就是t_mb值变大。当孵育槽内液体温度高于目标温度,则需要降低孵育槽底部铝块温度,减小t_mb的值。因此通过增加第二闭环,通过t_mb的改变来控制温度控制器的输出功率,可以提早温度控制器的反应时间,从而实现更加快速精确地控温。
11、进一步地,所述每一个时刻包括当前时刻、上一时刻与上上时刻。
12、进一步地,所述第一闭环的pid算法公式为:
13、△t_mb=kp*(△t0-△t1)+ki*△t0+kd*(△t0–2*△t1+△t2);
14、其中,△t0=t_target–t_real;t_target为孵育槽内液体的目标温度,t_real为孵育槽内液体实际测得温度;△t0是当前时刻的孵育槽内液体的目标温度与孵育槽内液体实际测得温度的差值;△t1是上一时刻的孵育槽内液体的目标温度与孵育槽内液体实际测得温度的差值;△t2是上上时刻的孵育槽内液体的目标温度与孵育槽内液体实际测得温度的差值;t_mb为孵育槽底部铝块的目标温度,△t_mb为t_mb需要调整的偏差;kp是比例系数、ki是积分系数、kd是微分系数。
15、t target是孵育槽内液体需要达到的目标温度,也就是本系统设定的目标温度值。t_mb是一个动态的目标温度值(也可以理解成:t_mb为孵育槽底部铝块的目标温度值),他初始状态设定的值就是以target的值来进行推断,比如我们要把孵育槽内液体温度加热到50℃,t target=50,需要把液体温度加上去,我们需要对装液体的容器(孵育槽)进行加热,比如先对孵育槽底部的铝块进行加热,通过铝块导热给孵育槽内的液体,最终才能把液体温度加上去。所以t_mb相当于是给孵育槽底部铝块设定一个目标温度(比如可以初始的时候设定t_mb=t target+10°),但是这个目标温度值是个动态的量,也就是当孵育槽内液体温度过低,则需要让t_mb变大,当孵育槽内液体温度过高,则需要让t_mb变小。
16、进一步地,所述kp为2.0,ki为0.008,kd为1.0。
17、kp、ki和kd的值需要相当漫长的时间调试和摸索,再经大量的实践验证来确定。
18、进一步地,所述第二闭环的pid算法公式为:
19、△p=kp’*(△t0’-△t1’)+ki’*△t0’+kd’*(△t0’–2*△t1’+△t2’);
20、其中,△t0’=t_mb–t_temp;t_mb为孵育槽底部铝块的目标温度,t_temp为孵育槽底部铝块实际测得温度;△t0’是当前时刻的孵育槽底部铝块的目标温度与孵育槽底部铝块实际测得温度的差值;△t1’是上一时刻的孵育槽底部铝块的目标温度与孵育槽底部铝块实际测得温度的差值;△t2’是上上时刻的孵育槽底部铝块的目标温度与孵育槽底部铝块实际测得温度的差值;△p是输出功率的变化量;kp’是比例系数、ki’是积分系数、kd’是微分系数。
21、进一步地,所述kp’为18.0,ki’为0.05,kd’为0。
22、进一步地,所述当前时刻与上一时刻之间相差0.05s,上一时刻与上上时刻之间相差0.05s。
23、当前时刻与上一时刻之间相差0.05s,上一时刻与上上时刻之间相差0.05s,也就是说,本发明提供的快速精确控温系统的计算与控制频率是20hz,这个频率是经过大量实验尝试后最终获得的最合适的设计,通过该0.05s的时间间隔,再结合当前时刻、上一时刻、上上时刻的温度实时监测,在特定的pid算法控制下,才能够真正实现荧光原位杂交设备的温度控制精度达到±0.3℃。
24、另一方面,本发明提供了一种通过采用如上所述方法快速精确控温的荧光原位杂交设备。
25、进一步地,所述荧光原位杂交设备包括孵育槽、温度控制器和温度传感器;所述温度传感器包括孵育槽内液体温度传感器和孵育槽底部铝块温度传感器;所述温度控制器通过加热或制冷来控制温度。
26、在一些方式中,所述荧光原位杂交设备采用半导体热电制冷器作为温度控制器,并通过石墨烯导热层向孵育槽底部铝块传热,同时设置散热片和风扇帮助散热。
27、在一些方式中,温度的加热的传导过程是先通过半导体热电制冷器工作来加热或制冷,温度经过石墨烯导热层均匀地分散到孵育槽底部的整个区域,然后再把温度导到上面铝材质的孵育槽(孵育槽底部铝块),最后是将热量传递到孵育槽内的液体中。制冷过程热传导则相反,制冷过程中会导致半导体热电制冷器的下底面发热,热量通过散热片和风扇散出。
28、在一些方式中,所述荧光原位杂交设备包括实验模块、电路控制板、稳压源和电机,所述实验模块内设有孵育槽、温度控制器和温度传感器,每台荧光原位杂交设备可以同时设有多个实验模块,从而可以同时开展多组样品的孵育和检测。
29、再一方面,本发明提供了一种pid算法用于实现荧光原位杂交设备的孵育槽温度精确控制在±0.3℃的用途,所述pid算法采用双闭环控制,计算温度控制器的输出功率变化量,按照该变化量调节温度控制器的输出功率,实现孵育槽内液体的快速精确控温;
30、所述双闭环包括第一闭环和第二闭环,第一闭环由每一个时刻的孵育槽内液体的目标温度与孵育槽内液体实际测得温度的差值,来计算孵育槽底部铝块的目标温度变化量;第二闭环由每一个时刻的孵育槽底部铝块的目标温度与孵育槽底部铝块实际测得温度的差值,来计算温度控制器的输出功率变化量。
31、本发明的有益效果为:
32、1、采用双闭环控制的pid算法,增加了孵育槽底部铝块的目标温度这个假想目标值通过t_mb的改变来控制温度控制器的输出功率,可以提早温度控制器的反应时间,从而实现更加快速精确地控温;
33、2、摸索出最佳的比例系数、积分系数和微分系数,获得双闭环pid算法公式;
34、3、通过0.05s的时间间隔,结合当前时刻、上一时刻、上上时刻的温度实时监测,并采用双闭环pid算法公式,真正实现荧光原位杂交设备的温度控制精度达到±0.3℃;
35、4、降低荧光原位杂交设备的检测误差,提升在分子检测领域的应用潜力,具有广泛的应用前景。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149438.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表