一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法
- 国知局
- 2024-07-30 09:27:40
本发明涉及多无人机系统控制,具体涉及一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法。
背景技术:
1、多智能体系统,是指大量分布配置的自治或半自治的子系统(智能体)通过网络互连所构成的复杂的大规模系统,它是“系统的系统”。因此,多智能体系统具有自主性、分布性、协调性等特点,可以解决一些单个系统难以解决的复杂问题,在传感器网络、无人车/无人机编队、多导弹攻击、智能交通系统等领域有着广泛的应用。
2、近几年,多无人机系统的领导-跟随一致性己然成为一个热门话题。领导-跟随一致性控制旨在通过使跟随无人机根据领航者的行为调整自己的行为,实现整个系统的一致性。在这种控制框架下,通常会有一个或多个领航者,它们的行为被视为参考信号,其他跟随无人机则通过与领航者保持一致来实现不同的任务目标。
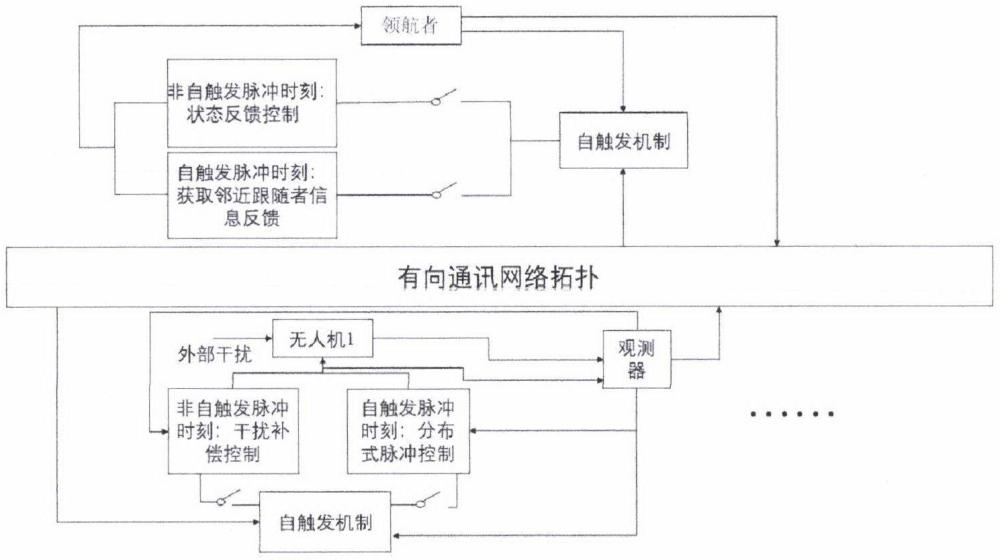
3、然而,从上述的研究框架中,不难看出,在传统的领导-跟随一致性控制框架中,领航者始终是独立于跟随无人机的,不会受跟随无人机的影响。因此,从文献[1]中获得启发,修改领航者的属性,赋予其能够在特定时间内获取来自其邻近跟随无人机的反馈信息,并称这样的领航者为“智慧”领航者。通过引入自触发机制和脉冲控制,使得“智慧”领航者只在有需要的时刻发挥作用,避免了“智慧”领航者频繁作用,也保持整个系统的领导-跟随框架不被破坏,同时“智慧”领航者对整个团队凝聚力做出了贡献。
技术实现思路
1、本发明的目的是提出一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法,可有效减少跟随无人机与领航者之间的误差,提高整个系统的稳定性和凝聚力。
2、本发明的具体技术方案如下:一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法,包括以下步骤:
3、考虑到外界环境中存在各式各样的干扰,根据参考文献[2],建立如下的受扰跟随无人机系统动力学模型和“智慧”领航无人机动力学模型:
4、
5、
6、上述式中,i={0,1…n}表示智能体数量,θi(t),i={1,…,n}表示跟随无人机系统外部扰动,i={1,…,n}表示跟随无人机状态,x0(t),i=0表示领航者状态,i={1,…,n}表示跟随无人机待设计得控制器连续部分.i={1,…,n}表示跟随无人机待设计得控制器离散部分,i=0表示领航者待设计得控制器连续部分,i=0表示领航者待设计得控制器离散部分,a,b,c是维度适合的已知系统矩阵,d满足匹配条件d=b。
7、首先为处理外部扰动对无人机的影响,选择扩张状态变量并构建如下增广后的新多无人机系统:
8、
9、式中,
10、针对增广后的新多智能体系统,设计如下的线性扩张状态观测器:
11、
12、式中,表示跟随无人机系统状态的估计值,表示外部扰动估计值,代表线性扩张状态观测器的增益矩阵。
13、进一步,通过选择恰当的观测器增益使得线性扩张状态观测器提供精确的估计值,通过观测器输出值,设计领航者控制器:
14、
15、式中,gj表示当跟随无人机与领航者相联时gj=1,否则gj=0;lk>0表示在自触发的脉冲时刻的脉冲增益,k表示局部反馈增益,是由下式进行迭代更新:
16、
17、式中,表示自触发机制函数,表示领航者与跟随无人机之间的邻域误差,表示触发误差,α>0,β>0,λ>0,i′={0,1,2,…,n}。
18、通过设计得领航者控制器,可以看出“智慧”领航者只在自触发的脉冲时刻发生作用,接下来证明无zeno现象来说明“智慧”领航者没有频繁发生作用,整体保持了整个系统的领导-跟随组织框架结构:
19、
20、
21、
22、因此即证明了无zeno现象。
23、根据线性扩张状态观测器的输出值,构造如下跟随者控制器:
24、
25、接下来设定追踪误
26、考虑t∈(tk-1,tk),
27、构造如下lyapunov函数:
28、
29、式中,表示追踪误差的紧凑集形式变量,e(t)=[ext(t),eθt(t)]t表示观测器的状态、扰动估计误差紧凑集形式变量,p1表示正定且对称矩阵,p2表示正定且对称矩阵,
30、对所构造的lyapunov函数进行求导,可得如下式子:
31、
32、其中对下列式子进行单独处理:
33、
34、
35、式中,表示一个标量,表示张量积,
36、在此基础上整理可得如下式子:
37、
38、式中,
39、
40、
41、进一步通过计算,可以得到如下公式:
42、
43、通过gronwall-bellman不等式解上述微分不等式方程,可得:
44、
45、式中,
46、针对自触发的脉冲时刻,考虑t=tk并构造如下lyapunov函数:
47、
48、假设系统变量在自触发脉冲时刻处是左连续的,可得如下式子:
49、
50、通过条件可以进一步获得如下式子:
51、v(tk+)≤η(k)v(tk-)=η(k)v(tk),
52、式中,0<η(k)<1表示其是介于0~1之间的常数。
53、综上讨论,对于任意时刻t∈(tk,tk+1],经过放缩整理有如下式子:
54、
55、式中,表示一个当时间趋向无穷时,函数值趋向负无穷的连续函数,界
56、因此,一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制在本发明所设计的控制律下实现。
技术特征:1.一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法,其特征在于,整个多无人机系统中包含一个具有“智慧”的领航者,即能够获取跟随者无人机的反馈信息,这样的领航者被称为“智慧”领航者。在本发明中,控制方法包括以下步骤:
2.根据权利要求1所述的一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法,考虑到实际环境中存在各式各样的干扰,参考文献[2],并建立如下具有外部扰动的受扰多无人机系统动力学模型:
3.根据权利要求2所述的一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法,针对未知但有界的外部扰动以及无人机系统状态不可直接测量的情况,首先将无人机系统中外部扰动视为新的系统状态变量,其次建立新的增广多无人机系统并构建线性扩张状态观测器,最后同时输出无人机系统的状态估计值和外部扰动估计值,具体步骤如下:
4.根据权利要求3所述的一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法,引入自触发机制来决定“智慧”领航者需要作用的时刻,当系统满足自触发条件时,在自触发的脉冲时刻,对领航者设计能够获得其邻近跟随者状态信息的脉冲控制律,使得领航者切换到“智慧”领航者,并在设计得控制律作用下更新“智慧”领航者自身的状态信息,具体步骤如下:
5.根据权利要求4所述的一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法,针对跟随无人机,在非脉冲时刻区间内构建基于线性扩张状态观测器的干扰补偿器;在满足步骤三中设计得自触发机制的自触发脉冲时刻,构建基于线性扩张状态观测器的分布式脉冲控制律,具体步骤如下:
6.根据权利要求5所述的一种基于具有“智慧”领航者的受扰多无人机系统自抗扰有界一致性控制方法,结合步骤二、三和四,利用lyapunov稳定性理论和脉冲控制理论,实现了具有“智慧”领航者的受扰多无人机系统自抗扰有界一致性控制,具体步骤如下:
技术总结本发明公开了一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制方法。该方法首先针对外部扰动和系统状态未知的情况下,构建了一个线性扩张状态观测器,为后续设计控制器和处理外部扰动奠定了基础。然后,接着为领航者和跟随无人机设计了控制器,其中所设计得控制器能够使得领航者在脉冲时刻切换到“智慧”领航者,即在脉冲时刻领航者能够获得跟随无人机的反馈信息,引领整个系统的运动趋势。接着,设计一种基于跟随无人机与领航者之间误差的自触发机制函数,来决定“智慧”领航者需要发挥作用的自触发脉冲时刻,并且严格证明了没有Zeno现象。最后保证了在扰动作用下,实现了一种具有“智慧”领航者的受扰多无人机系统主动抗干扰一致性跟踪控制,并且跟随无人机与“智慧”领航者之间误差相比于普通领航者是有所减少的,“智慧”领航者对整个系统稳定性做出了一定贡献。技术研发人员:秦雯,陈磊,沈谋全受保护的技术使用者:南京工业大学技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/149503.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表