一种考虑再入动力学模型误差的制导参数鲁棒优化方法
- 国知局
- 2024-07-30 09:27:33
本发明属于飞行器制导参数设计与优化领域,涉及一种能够提高再入飞行器制导控制系统抗误差扰动能力的制导参数鲁棒优化方法。
背景技术:
1、制导控制参数对于再入飞行器的制导精度和打击效果具有重要影响。目前,制导控制参数取值主要依靠设计人员调试,需要设计人员多次迭代和分析计算,工作量大、效率较低并且难以充分发挥飞行器性能。
2、因此有必要研究一种能够适应复杂任务场景的制导控制参数设计和优化方法。本发明针对高超声速再入飞行器给出一种制导参数鲁棒优化方法,能够有效提高再入飞行器制导控制系统对动力学模型等误差的抗扰动能力,从而提高再入飞行器的飞行性能。
技术实现思路
1、为了提高高超声速再入飞行器制导控制系统的抗扰动能力,本发明给出一种再入制导参数鲁棒优化方法,能够有效提高高超声速再入飞行器制导控制系统对动力学模型误差和参数扰动的适应能力,从而提高其飞行性能。
2、本发明基于制导跟踪算法建立制导参数与制导偏差之间的映射关系,然后以在考虑动力学模型等误差扰动情况下多次制导轨迹的平均制动偏差最小为优化指标,采用优化算法对制导参数进行优化,提高制导参数的对动力学模型等误差的抗扰动能力。具体的,本发明包括以下步骤:
3、步骤1:将再入轨迹分成多段,取每段的制导参数作为优化变量。
4、本发明对再入轨迹的制导参数进行分段优化。图1给出分成3段优化的示例。前2段每段攻角α和倾侧角σ为常值制导参数;第3段采用比例导引法,纵向和横向比例导引系数为常值制导参数。图1中hmin和hmax分别为滑翔高度范围的下界和上界。制导参数分段优化的思路是对每段的制导参数和持续时间进行优化,提高制导方法对动力学模型误差和参数扰动的适应能力。
5、以分3段为例,需要优化的制导参数如表1所示。根据实际优化任务,也可将再入轨迹分为更多段进行优化,取各段的制导参数和持续时间作为优化变量。
6、表1分成3段情况下再入制导参数
7、 再入阶段 制导参数 第1段 <![cdata[α<sub>1</sub>、σ<sub>1</sub>、t<sub>1</sub>]]> 第2段 <![cdata[α<sub>2</sub>、σ<sub>2</sub>、t<sub>2</sub>]]> 第3段 <![cdata[k<sub>1</sub>、k<sub>2</sub>]]>
8、步骤2:建立再入轨迹制导模型。
9、本发明将再入轨迹分为滑翔段和末段两部分分别建立制导模型。其中,滑翔段采用线性二次型(lqr)制导方法,末段采用比例导引制导方法。
10、(1)再入滑翔轨迹制导模型。
11、为了便于描述,本发明假设地球为均匀球体,忽略地球自转,那么描述高超声速再入飞行器质心运动的方程组为
12、
13、式中:r为飞行器到地心的距离;v为速度;γ为航迹倾角;ψ为航迹偏角;θ为经度;φ为纬度;m为质量;g为重力加速度;σ为倾侧角;t为时间;l和d分别为气动升力和阻力,是飞行器马赫数ma和攻角α的函数。
14、气动升力和阻力可表示为
15、
16、式中:cl和cd分别为升力系数和阻力系数,为马赫数ma和攻角α的函数;sref为气动参考面积;ρ为大气密度,是高度h的函数。
17、方程组(1)可进一步写成向量形式,即
18、
19、式中:x(t)=[r,v,γ,ψ,θ,φ]t为状态变量,u(t)=[α,σ]t为控制变量。
20、端点约束
21、φ(x(t0),t0,x(tf),tf)≤0 (4)
22、式中:t0为初始时间,tf为终端时间。端点约束包括初始条件约束和终端约束。
23、路径约束为
24、c(x(t),u(t),t)≤0,t∈[t0,tf] (5)
25、控制变量变化范围约束为
26、
27、式中:αmin和αmax为攻角的下限和上限;σmin和σmax为倾侧角的下限和上限。
28、每组制导参数对应一条标称轨迹。本发明的再入滑翔轨迹采用lqr制导方法。为此,将再入飞行器质心运动方程组(3)沿标称轨迹线性化得到
29、
30、式中:δx为考虑误差情况下的状态变量与标称轨迹状态变量的偏差,δx=[δr,δv,δγ,δψ,δθ,δφ]t;δu控制变量增量,δu=[δα,δσ]t,δu是lqr制导的反馈控制量;a(t)和b(t)分别为状态变量偏差和控制变量增益对应的系数矩阵。
31、系数矩阵a(t)和b(t)的表达式为
32、
33、式中:xref(t)和uref(t)分别为标称轨迹的状态变量与控制变量。
34、lqr控制器的性能指标选取为
35、
36、式中:q和r为权重矩阵,均为对角矩阵,并且满足q半正定,r正定。
37、矩阵q、r可参考bryson法则取值,即
38、
39、式中:qii和rjj分别为矩阵q和r的元素;△rmax、△φmax分别为r、φ的最大容许误差;△αmax、△σmax分别为α、σ的最大容许反馈控制量。
40、(2)末段轨迹制导模型。
41、在三维空间中,再入飞行器与目标之间的相对运动方程组如下
42、
43、式中:r为再入飞行器与目标的距离;γl为目标视线俯仰角;ψl为目标视线偏航角;vm为再入飞行器的速度;γm为再入飞行器的航迹倾角;ψm为再入飞行器的航迹偏角;k1为纵向通道比例导引系数;k2为侧向通道比例导引系数。
44、由比例导引法确定的飞行器需用过载可表示为
45、
46、式中:ny为纵向过载;nz为侧向过载,g为重力加速度。通过式(12)计算出飞行器的需用过载,据此可以解算出所需要的攻角和倾侧角。当某一时刻需用过载大于飞行器的极限过载时,则根据极限过载计算该时刻的攻角和倾侧角。
47、步骤3:以平均制导偏差为目标,对制导参数进行优化。
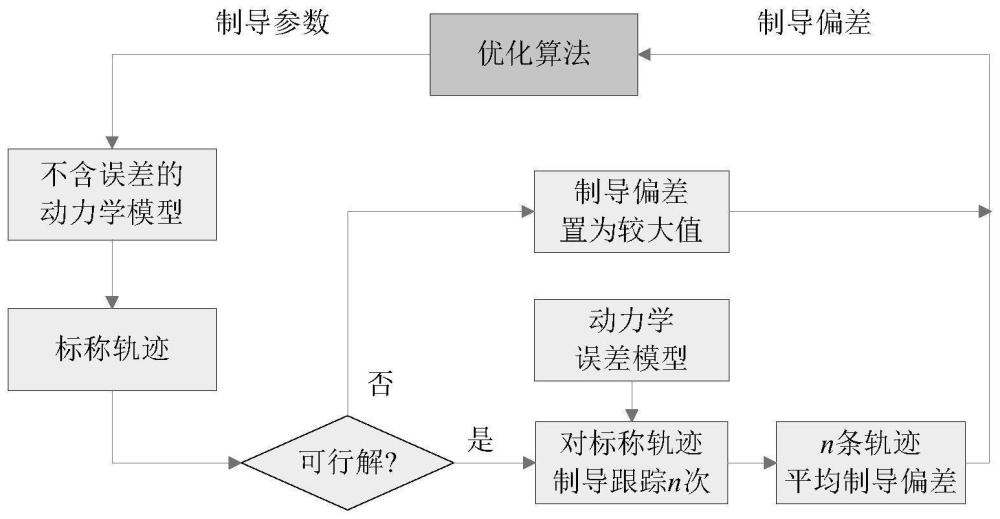
48、在引入动力模型等误差的情况下,以平均制导偏差最小为目标采用优化算法对制导参数进行优化。附图2给出制导参数优化流程,步骤如下:
49、(1)建立制导参数到制导偏差的映射关系,具体方法为:
50、(a)对于每一组制导参数,在不考虑模型误差的情况下,根据再入飞行器滑翔段动力学模型和比例导引模型采用数值积分可得到对应的标称再入轨迹,即采用数值积分方法积分方程组(1)和(11)得到的标称再入轨迹;
51、(b)根据再入动力学模型的约束关系式,判断标称再入轨迹是否为满足约束的可行解,如果是可行性解则转入步骤(c),否则转入步骤(d);
52、(c)在考虑动力学模型等误差情况下,对再入轨迹制导跟踪n(n≥200)次,得到n条轨迹的平均制导偏差,完成映射关系的建立;
53、(d)不进行制导,直接将制导偏差置为较大值(约束违反程度越大,制导偏差越大),完成映射关系的建立。
54、(2)优化制导参数。根据步骤(1)建立的从制导参数到制导偏差的映射关系,采用优化算法对制导参数进行优化,取n条制导轨迹的平均制导偏差最小为目标。附图2给出制导参数优化流程图。优化算法可选取粒子群算法、遗传算法等。对再入轨迹制导跟踪n次时,可利用多核并行方式提高计算效率。
55、步骤4:评估再入制导参数优化效果。
56、在考虑再入轨迹动力学模型误差的情况下,基于优化算法优化出的制导参数对再入轨迹制导跟踪m(m≥5000)次,得到m条制导轨迹,统计m条再入制导轨迹的性能指标和约束满足情况,展示制导参数优化的效果。类似地,对再入轨迹制导跟踪m次时,可利用多核并行方式提高计算效率。
57、本发明与现有技术相比的有益效果在于:
58、本发明给出了一种再入制导参数鲁棒优化方法,其优势是在优化模型中引入了动力学模型偏差等不确定性因素,以很多条制导轨迹的平均制导偏差为优化指标对再入制导参数进行优化,寻找最佳制导参数,提高了再入制导方法对动力学模型等随机误差的抗扰动能力,即优化后的制导参数在考虑动力学模型等随机误差情况下能够使得绝大部分制导轨迹分布在标称轨迹附近的小范围内,相对于传统方法针对基准工况下单条轨迹设计的制导参数具有更好的抗扰动能力。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149491.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表