用于功能的机械停止和起动系统以及包括该系统的手表的制作方法
- 国知局
- 2024-07-30 09:41:15
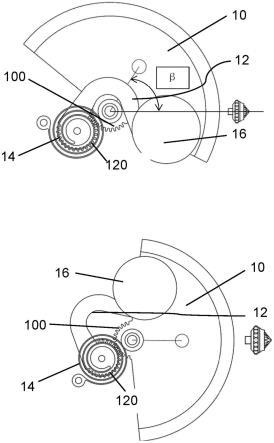
1.本发明涉及钟表领域,并且涉及一种用于停止和起动功能的机械系统。表述“起动功能”被定义为功能从初始静止状态向第二活动状态的转换,并且表述“停止功能”被定义为从活动状态向静止状态的反向转换。背景技术:2.在机械钟表领域中,具有静止或停止状态和操作状态的功能是已知的。例如,这是用计时器或用三问表的情况,它们由按钮或触发件致动。一些功能同样由复杂的触发系统自动命令,如小时报时机构或报警机构的情况。3.文献us3541781公开了一种机构,该机构使得能够检测佩戴者是站着还是坐下,并且能够测量在这些位置中花费的时间。杠杆安装成可自由旋转,并且仅在其重量的作用下并且根据装置的位置来阻挡或释放计数传动机构的擒纵轮。然而,这种机构不是非常精确,并且没有限定测量起动或停止的装置位置。4.本发明的目的是提出一种用于功能的命令机构,其可以用于机械手表中,也就是说,不使用电子或电气元件的手表,并且其至少部分地克服了现有技术的缺点。技术实现要素:5.更具体地,本发明涉及一种用于停止和起动钟表的功能的机械系统,该机械系统包括在分别由第一止动件和第二止动件限定的第一极限位置和第二极限位置之间可移动地安装在框架上的质量块,所述质量块在重力的作用下移位,由此使弹簧在第一极限位置至第二极限位置之间加载,并且由此使弹簧在第二极限位置至第一极限位置之间释放,所述质量块运动地或直接地连接到用于所述功能的控制构件。6.质量块和弹簧的力被确定为命令所述功能并使控制构件移位所需的力以及所述框架的预定空间定向的函数,在该预定空间定向中,质量块根据由弹簧和重力施加的力的合力从其极限位置中的一者向另一者双稳态地移位,质量块从第一极限位置向第二极限位置的移位能够经由控制构件起动所述功能,并且质量块从第二极限位置向第一极限位置的移位能够经由控制构件停止所述功能。7.本发明的这个定义延伸到用于命令钟表的功能的命令系统,能够占据第一状态和第二状态,特别是动画。8.根据另一方面,本发明同样涉及包括这种停止和起动系统的手表。附图说明9.在参考附图阅读以下描述后,本发明的其它细节将变得更加清楚,其中:[0010]-图1示出了为被佩戴时手表所经受的旋转轴线所选择的定义,[0011]-图2和图4是根据特定实施方式的停止和起动系统分别在第一极限位置和第二极限位置的图,以及[0012]-图3示出了包括根据本发明的系统的手表,以建立参考轴和角度的位置。具体实施方式[0013]本发明的目的是提出一种机械开关,其使得可以根据命令起动和停止功能,但是没有直接的机械动作或施加到开关的压力。更具体地说,根据本发明的停止和起动系统使得可以根据系统的空间定向以及因此根据包含了该系统的手表的空间定向来起动和停止功能。如下文将理解的,各种尺寸是可能的,但是优选实施方式是对根据本发明的系统进行尺寸设计和布置,使得当佩戴者进行通常的移动以当手表在其手腕上时读取时间时功能起动,并且当佩戴者旋转手腕时功能停止,例如以将其手臂返回到更竖直的位置。[0014]更特别地,根据本发明的用于停止和起动功能的系统包括振荡质量块类型的质量块,其可移动地安装在手表框架上位于第一极限位置和第二极限位置之间。这些后者分别由第一止动件和第二止动件限定,所述第一止动件和第二止动件可以是弹性的以便缓冲震动。[0015]弹簧连接到质量块。弹簧和质量块之间的连接优选是直接的,使得质量块的位移对弹簧的卷绕具有直接影响。更特别地,当质量块在重力的作用下移位时,跟随设定其运动的佩戴者的部分的移动,弹簧被布置成当质量块在第一极限位置至第二极限位置之间移位时被质量块加载。相反,当质量块在第二极限位置至第一极限位置之间移位时,弹簧放松,并且在这种情况下,克服重力作用而将储存的能量恢复到质量块。[0016]该质量块运动地或直接地连接到用于所述功能的控制构件。有利地,质量块与控制构件之间的连接是连控轨道(desmodromic)的。该连接可以是具有小齿轮或齿条的啮合类型,该小齿轮或齿条由质量块承载并与控制构件啮合。该质量块同样可以直接承载磁体,该磁体可以磁性地控制例如视觉动画类型的功能,如将在下面详细描述的。[0017](质量块的)质量以及弹簧的力被确定为命令所述功能和使控制构件移位所需的力的函数。该系统同样根据手表的预定角度定向而被确定尺寸,其中,质量块根据由弹簧和重力施加的力的合力而从其极限位置中的一者向另一者移位,质量块从所述极限位置中的一者向另一者的移位分别经由控制构件而引起所述功能的起动或停止。[0018]换句话说,在第一步骤中,确定分别起动或停止功能(枢转计时器的梭子或柱轮,致动触发杆,使磁体移位,....)所需的力或扭矩。[0019]同样确定手表的定向(其中,期望功能被分别起动或停止)。在优选实施方式中,当佩戴者在阅读位置抬起手表以观看它时,确定功能被起动。如图1所示,角度α定义为围绕轴线9h-3h的旋转角度,角度β定义为围绕轴线12h-6h的旋转角度,轴线γ定义为围绕穿过表盘的中心的正交轴线的旋转角度。当手表水平放置并面向佩戴者时,这三个角度为零,其中轴线9h-3h大致平行于肩线。在用于读取时间的传统位置,其中期望起动所述功能,应用以下内容:α在30°至35°之间,β=0°,γ=0°。[0020]优选但非必须地,还期望在手腕的不同于先前位置的旋转位置中停止该功能。因此限制了在围绕单一方向的停止和起动之间的无意交替的风险。优选地,将停止定向限定为α在15°至18°之间,β=0°,γ=0°。应当注意,停止定向优选地不同于考虑到起动的起动点的中性定向(其中α=0°,β=0°,γ=0°)。为了区分分别用于起动和停止功能的手表的定向,可以在弹簧的计算中利用这种滞后现象。这种区分使得可以避免起动和停止之间的无意的交替,如果手表围绕唯一的触发和停止位置摆动,则可能发生这种无意的交替。[0021]基于这些因素,确定质量块的行程和(质量块的)重量,以便产生所需的扭矩。[0022]然而,还需要确定弹簧的刚度和预加载的大小。其功能是,假如手表没有放置在对应的定向,则克服重力作用,保持质量块邻接在其第一极限位置。超过这个定向,重力施加的力大于弹簧施加的力,并且质量块移位,从而起动功能。当该质量块邻接在其第二极限位置时,该弹簧同样具有当重力施加的力变得小于弹簧施加的力时将该质量块带到其第一极限位置的功能。然后,质量块停止该功能。[0023]质量块的尺寸确定和计算以及弹簧的特性的确定和计算在本领域技术人员的范围内,而不必详细描述它们。为了获得预期的结果,存在多种参数解决方案,例如具有较重的质量块和较强的弹簧,系统可以根据所需的规格被触发和停止。[0024]还可以使用安装成可旋转移动的非平衡质量块,类似于用于自动重绕的振荡质量块,其中一些以有限的角度行程操作。在这种情况下,考虑了包括质量块的偏心的不平衡,其对所提供的扭矩有影响。然而,质量块同样可以具有线性或复杂轨迹。[0025]以这种方式预先确定起动定向和停止定向。该质量块是双稳态型的,并且假如手表没有移动通过起动定向,则该质量块被保持在其第一极限位置,而假如手表没有移动通过停止定向,则该质量块被保持在其第二极限位置。[0026]与本发明不同,用于自动重绕机的振荡质量块不能够停止重绕功能。在任何情况下,即使需要考虑到在质量块的某些位置,特别是当质量块停止时,没有发条盒的重绕,重绕和非重绕位置也不是预限定的,并且不与手表的特定空间定向相对应。[0027]为了减小与质量块的位移和与止动件的相互作用相关的冲击,质量块可连接到速度调节器。该后者可以是擒纵机构,例如在一些报时机构中使用的摩擦静止擒纵机构,或者也是在报时机构中使用的类型的离心惯性制动器。也可以使用磁性或基于油槽的制动装置。[0028]为了向用户提供分流(shunt)开关并移动手表而不触发功能的可能性,可以提供用于阻挡质量块的阻挡装置。该装置有利地可从手表的外部接近。它可以包括按钮或螺栓,该按钮或螺栓直接或间接地与质量块相互作用,以阻挡其移动,优选地在其极限位置中的一者处。[0029]根据本发明的系统可以以独立模块的形式布置,包括其自己的框架并且安装在基座机芯上。使得能够执行待被命令的功能的机构或部件可以类似地布置在框架上或布置在基座机芯上。在这种情况下,在模块和基座机芯之间将提供运动学连接或另一类型的连接,例如磁性连接。[0030]根据本发明的系统可用于命令,也就是说起动和停止功能,用于允许该功能被执行的机构设置在手表中。[0031]可以由根据本发明的系统控制的功能的数量是视觉动画。当质量块分别处于其第一极限位置或第二极限位置时,视觉动画可以例如通过释放或阻挡发条盒而被机械地命令。通常通过驱动可移动元件被保持压靠的凸轮,该发条盒可以驱动jacquemart类型的自动机。通过在该质量块上安装磁体或者通过具有由该质量块驱动的磁体,该磁体可驱动顺磁性或抗磁性可移动元件的移位,该可移动元件能够通过自身移位而对磁体的位移作出反应。该位移可以经由所述可移动元件的安装而被引导,例如旋转地或在导轨上。[0032]图2示出了根据本发明的起动和停止系统的特定实施方式的示例。根据该示例,待命令的功能是动画,由磁体的移动控制。[0033]该质量块是被安装成可旋转移动的振荡质量块10。它配备有齿100,该齿与和控制构件成一体的齿120啮合,该控制构件采用杆12的形式,安装成能够在模块或钟表的框架上枢转。有利地,齿100和120是不完整的,也就是说,它们设置在小于360°的带齿扇形部上,只要振荡质量块10通过两个未示出的止动件被限制在其两个极限位置之间旋转。在示例性实施方式中,齿之间的减速比设定为等于-1。[0034]弹簧14是螺旋型的,在该示例中,在杆的旋转轴线处,经由其端部中的第一端部作用在控制构件上。另一端部固定到框架。[0035]在其与旋转轴线相反的端部处,杆12承载磁体16。该磁体作用在可移动的磁性元件上,例如可在表盘上方移动,以便在起动和停止系统被隐藏在表盘下方的同时对用户可见。[0036]当手表处于水平位置时,重力平行于质量块的旋转轴线作用。结果,质量的不平衡不在轴线处产生任何扭矩。[0037]此外,在该示例中,弹簧14沿顺时针方向被预加载。因此,弹簧14将沿顺时针方向向杆施加扭矩,从而经由啮合连接将趋于使其沿逆时针方向枢转的扭矩传递到振荡质量块10。然而,在该位置,振荡质量块10处于其第一极限位置,抵靠被称为上止动件(图中未示出)的止动件。因此,该系统在第一稳定位置是平衡的。通过磁体定位的磁性元件同样处于第一稳定位置。在该第一位置中,其可以隐藏在覆盖件后面,以便不被佩戴者看到。[0038]当手表的佩戴者使其绕轴线9h-3h(图3)旋转角度α时,由重力在轴线x处在质量块上产生的扭矩根据下式逐渐增加:[0039]质量块的扭矩=d*m*重力*sin(α)*cos(β)[0040]其中β是质量块的中心相对于轴9h-3h(图2)的角度(具有根据三角学规则的符号)。[0041]复位弹簧的扭矩(在质量块的旋转中心处获得)是恒定的,而β保持相同,并且其值如下:[0042]弹簧的扭矩=-k*(θ0+β0-β)[0043]其中β0是当质量块处于其第一稳定位置时的角度β。[0044]还存在用于将功能从停止状态转换到起动状态的阻力矩。在该示例中,该扭矩将被认为是恒定的(具有值cresistif)并且与位移方向相反。[0045]因此,施加到质量块的扭矩的平衡是:[0046]c=d*m*重力*sin(α)*cos(β)-k*(θ0+β0-β)-cresistif[0047]当该扭矩为负时,质量块趋于沿逆时针方向旋转,并因此在第一稳定位置保持邻接。[0048]当sine(α)变得大于(β=β0)时,该扭矩变为正:[0049]sin(α0)>(k*(θ0)+cresistif)/(d*m*重力*cos(β0))。[0050]扭矩变为正的角度表示为α0。[0051]一旦施加到振荡质量块10的扭矩的合成已经变为正,则由重力产生的扭矩将大于功能和复位弹簧的抵抗扭矩。因此,质量块将绕其轴线沿顺时针方向枢转(β将减小)。只要振荡质量块10没有到达其第二极限位置(图4),它就将移动抵靠被称为下止动件(未示出)的止动件,或者直到由重力产生的扭矩再次变得小于阻力矩。[0052]实际上,如果手表的角度α不变化,则仅角度β将改变,并且将寻求由重力产生的扭矩的级数比弹簧的级数更快地增加(通过明智地选择质量快和弹簧的各种参数)。这样,一旦质量块开始移动,扭矩仅随着振荡质量块10的位移而增加,并且从第一极限位置到第二极限位置的转换连续地发生,而不经过稳定的中间位置(不改变手表的角度),并且质量块因此是双稳态的。磁性元件同样处于第二稳定位置。在该第二位置中,它可以对佩戴可见。[0053]只要手表的角度保持不变,系统就保持与处于其第二稳定位置的振荡质量块10平衡。然而,扭矩的方程已经改变,因为函数的阻力矩的符号现在已经改变(为了这次将函数从起动状态转换到停止状态,质量块必须沿逆时针方向旋转)。[0054]我们具有:[0055]c=d*m*重力*sin(α)*cos(β)-k*(θ0+β0-β)+cresistif[0056]当该扭矩为正时,振荡质量块10趋于沿顺时针方向转动,并因此在第二稳定位置保持邻接。[0057]当sine(α)变得小于(β=βf)时,该扭矩变为负:[0058]sin(αf)<(k*(θ0+β0-βf)-cressistif)/(d*m*重力*cos(βf))。[0059]扭矩变为负的角度表示为αf。[0060]一旦施加到质量块的扭矩的合成已经变为负,则由重力产生的扭矩将小于功能和复位弹簧的抵抗扭矩。因此,振荡质量块10将绕其轴线沿逆时针方向枢转(β将增大)。只要质量块没有返回到其第一极限位置,或者直到重力产生的扭矩再次大于阻力矩,质量块就将移动。[0061]实际上,如果手表的角度不变化,则仅e将改变,并且将寻求由重力产生的扭矩的级数比弹簧的级数更快地减小(通过明智地选择质量和弹簧的各种参数)。这样,一旦质量块开始移动,扭矩随着质量块的位移而仅减小,并且从第二极限位置向第一极限位置的转换连续地发生,而不经过稳定的中间位置(不改变手表的角度),并且质量块因此实际上是双稳态的。[0062]应当注意,在可视动画的情况下,必须广泛地理解停止和起动功能的概念,如对应于可视动画的第一状态和第二状态。值得一提的是,可以使用术语“命令系统”作为术语“停止和起动系统”的等同物。[0063]类似于由发条盒驱动的视觉动画,该功能也可以是报时机构,其触发可以由报时机构来完成。当发条盒分别处于其第一极限位置或其第二极限位置时,根据质量块的定位,发条盒被释放或被阻挡。[0064]在所提及的实现发条盒的两个示例中,发条盒由重绕机构重绕,具体地或经由机芯的主发条盒的重绕。这种重绕可以是手动的或自动的。同样,通过使用适于经由两个动力输出装置供应能量的发条盒,可以经由机芯的发条盒为所述动画机构或报时机构提供动力。[0065]经由啮合类型的运动连接(小齿轮或齿条),还可以通过计时器控制构件移动轮或小齿轮,例如计时器的一组梭子或柱轮。调零阶段可有利地通过单独作用于控制构件和常规调零元件(锤...)的按钮来实现。[0066]与不平衡质量块的运动连接同样可以使至少一个可移动快门在主表盘、副表盘或表盘的一部分上或下方移位,以修改手表的外观或允许看到特定显示。可以使用偏振眼镜,并且经由这个或这些可移动快门来使偏振眼镜移位。[0067]这种快门也可通过释放发条盒而移位,类似于上面已经描述的。[0068]因此,当手表分别处于第一空间定向和第二空间定向时,根据本发明的系统使得可以通过起动和停止功能来命令功能,或者通过命令功能从第一状态转换到第二状态来命令功能,反之亦然。这些特定的空间定向对应于质量块的第一极限位置和第二极限位置。这些位置是确定的,并且由于质量块位移的双稳态特性,从功能的一个状态到另一个状态的转换是精确的,对应于特定的空间定向。[0069]本领域技术人员可以在不偏离权利要求中限定的本发明的范围的情况下修改上述描述。他们可以限定起动和停止定向、弹簧的类型、力和预加载以及质量块和控制系统之间的连接。
本文地址:https://www.jishuxx.com/zhuanli/20240730/150496.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表