基于光纤陀螺的世界时观测解析方法及地球自转钟系统
- 国知局
- 2024-07-30 10:16:19
本发明属于世界时测量,特别涉及一种基于光纤陀螺的世界时观测解析方法及地球自转钟系统。
背景技术:
1、世界时(universal time,ut1)是以地球自转运动为参考的时间计量系统,是地球定向参数(eop)之一,反映了地球自转角速度的变化,世界时参数是实现天球与地球参考架坐标互换的必要联系参数之一。ut1在科学技术、经济建设以及国防航天领域都具有不可替代的作用。
2、ut1具有时变特性,需要通过连续不断观测来获取。现有的ut1测量技术是以天顶筒、甚长基线干涉测量(vlbi)为代表的天文测量技术;受限于技术特点,天文测量技术无法保证全天候连续不断的ut1测量,对于地球自转变化中的高频项测量能力有限。
3、另外,当前ut1服务主要来自iers提供的解算结果,该结果由iers负责综合全球各观测台站以天文测量技术为主获取的观测数据解算得出,并通过周报和月报的方式向全球用户提供服务,从iers获取的ut1通常是事后解算,其数据至少滞后一周以上,并且相邻两个ut1值的时间间隔为1天,时间分辨率较低。
4、近年来,随着导航、航空航天等技术的不断发展,对获取ut1参数的及时性提出了越来越高的要求;然而,当前ut1服务受限于单一的数据来源,仍然存在着观测不连续、参数时间滞后以及时间分辨率低的技术问题。
技术实现思路
1、本发明的目的在于提供一种基于光纤陀螺的世界时观测解析方法及地球自转钟系统,以解决上述存在的一个或多个技术问题。本发明提供的技术方案,能够有效解决ut1服务的时间滞后问题,可实时提供ut1的观测解析结果,提高ut1参数的时间分辨率。
2、为达到上述目的,本发明采用以下技术方案:
3、本发明提供的一种基于光纤陀螺的世界时观测解析方法,包括以下步骤:
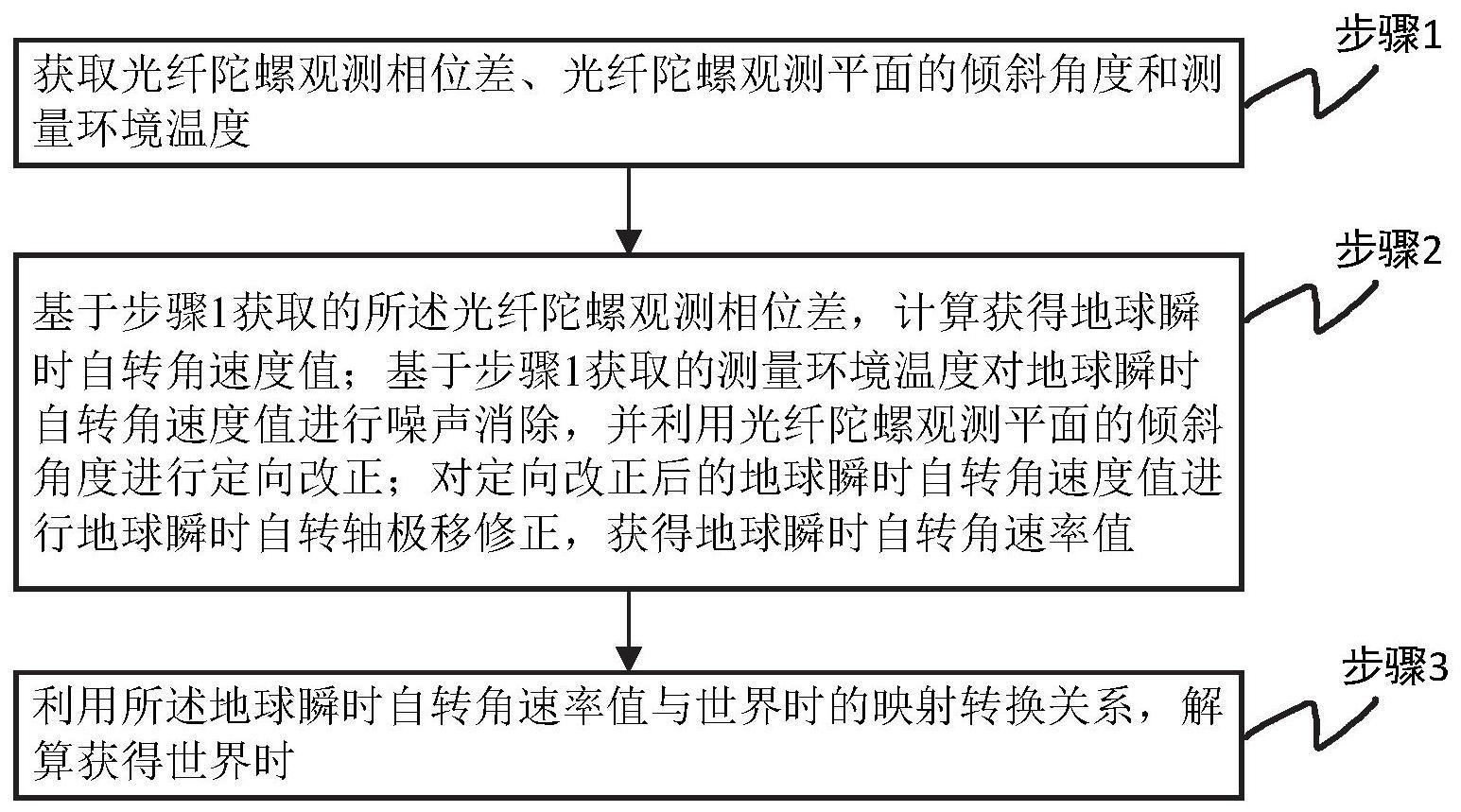
4、获取光纤陀螺观测相位差、光纤陀螺观测平面的倾斜角度和测量环境温度;
5、基于获取的所述光纤陀螺观测相位差,计算获得地球瞬时自转角速度值;基于获取的所述测量环境温度对所述地球瞬时自转角速度值进行噪声消除,并利用光纤陀螺观测平面的倾斜角度进行定向改正,获得定向改正后的地球瞬时自转角速度值;对所述定向改正后的地球瞬时自转角速度值进行地球瞬时自转轴极移修正,获得地球瞬时自转角速率值;
6、基于所述地球瞬时自转角速率值,利用地球瞬时自转角速率值与世界时的映射转换关系,解算获得世界时。
7、本发明方法的进一步改进在于,所述基于获取的所述测量环境温度对所述地球瞬时自转角速度值进行噪声消除,并利用光纤陀螺观测平面的倾斜角度进行定向改正,获得定向改正后的地球瞬时自转角速度值的步骤中,
8、采用的光纤陀螺观测方程表示为,
9、
10、式中,k′=kω0,ω0为地球平均自转角速率;m1,m2为瞬时地球自转轴的极移变化;m3为地球自转角速率的变化;为陀螺放置位置的纬度角;λ为陀螺放置位置的经度角;δφinstr表示光纤陀螺仪的固有噪声产生的等价相位差变化量;dtns指代陀螺仪在南北方向上产生的倾斜变化角度;为陀螺仪测站的纬度变化;k为光纤陀螺标度系数。
11、本发明方法的进一步改进在于,所述对所述定向改正后的地球瞬时自转角速度值进行地球瞬时自转轴极移修正,获得地球瞬时自转角速率值的步骤中,
12、地球瞬时自转轴极移表达式为,
13、m=m1+im2=[a1 sin(argi(t))+b1 cos(argi(t))]+i[c1 sin(argi(t))+d1 cos(argi(t))];
14、式中,argi(t)是由iers2010协议中表4.1和表4.2中的6个基本天文参数(l,l′,f,d,ω,γ)线性组合而成,六个天文参数分别是月球的平近点角、太阳的平近点角、月球平黄经和月球轨道升交点平黄经之差、月球和太阳的平均角矩、月球轨道升交点平黄经、gmst+π,gmst为格林尼治平恒星时;a1、b1、c1、d1为系数,通过iers给出的cip极移模型与瞬时自转轴与cip轴几何转换关系转换得到。
15、本发明方法的进一步改进在于,所述基于所述地球瞬时自转角速率值,利用地球瞬时自转角速率值与世界时的映射转换关系,解算获得世界时的步骤中,
16、解算获得世界时的解算方程为,
17、
18、式中,utc为协调世界时;(ut1-utc)(t)表示在utc的t时刻ut1与utc的差值;(ut1-utc)(t0)表示在观测起始的t0时刻ut1与utc的差值,t0为观测解算的起始utc时刻;ω(k)为地球瞬时自转角速率值,ω0为地球平均自转角速率值。
19、本发明方法的进一步改进在于,所述获取光纤陀螺观测相位差、光纤陀螺观测平面的倾斜角度和测量环境温度的步骤中,
20、采用的光纤陀螺的光纤环直径大于等于1m,光纤总长大于等于30km。
21、本发明方法的进一步改进在于,还包括以下步骤:
22、利用vlbi观测解析的高精度世界时与解算获得的世界时的比对结果,对光纤陀螺的标度系数进行校准;
23、利用校准后的标度系数,获得校准后的地球瞬时自转角速率值;
24、利用校准后的地球瞬时自转角速率值,获得校准后的世界时。
25、本发明方法的进一步改进在于,所述利用vlbi观测解析的高精度世界时与解算获得的世界时的比对结果,对光纤陀螺的标度系数进行校准的步骤中,
26、校准过程依据的关系式为,
27、
28、kn+1=kn+δk;
29、式中,δk表示标度系数的修正量;kn表示光纤陀螺经过第n次校准后的标度系数值,n=0,1,2,3,……,当n=0时,代表光纤陀螺的初始标度系数;δut1表示利用光纤陀螺观测解析的世界时与vlbi观测解析的世界时之间的差值。
30、本发明提供的一种基于光纤陀螺的地球自转钟系统,包括:
31、光纤陀螺实时观测系统,用于获取光纤陀螺观测相位差、光纤陀螺观测平面的倾斜角度和测量环境温度;
32、数据解耦分离与误差修正系统,用于基于获取的所述光纤陀螺观测相位差,计算获得地球瞬时自转角速度值;基于获取的所述测量环境温度对所述地球瞬时自转角速度值进行噪声消除,并利用光纤陀螺观测平面的倾斜角度进行定向改正,获得定向改正后的地球瞬时自转角速度值;对所述定向改正后的地球瞬时自转角速度值进行地球瞬时自转轴极移修正,获得地球瞬时自转角速率值;
33、ut1数据解算与服务系统,用于基于所述地球瞬时自转角速率值,利用地球瞬时自转角速率值与世界时的映射转换关系,解算获得世界时。
34、本发明系统的进一步改进在于,还包括:
35、自转钟标定校准系统,用于利用vlbi观测解析的高精度世界时与解算获得的世界时的比对结果,对光纤陀螺的标度系数进行校准;利用校准后的标度系数,获得校准后的地球瞬时自转角速率值;利用校准后的地球瞬时自转角速率值,获得校准后的世界时。
36、本发明系统的进一步改进在于,所述自转钟标定校准系统中,执行利用vlbi观测解析的高精度世界时与解算获得的世界时的比对结果,对光纤陀螺的标度系数进行校准的步骤中,
37、校准过程依据的关系式为,
38、
39、kn+1=kn+δk;
40、式中,δk表示标度系数的修正量;kn表示光纤陀螺经过第n次校准后的标度系数值,n=0,1,2,3,……,当n=0时,代表光纤陀螺的初始标度系数;δut1表示利用光纤陀螺观测解析的世界时与vlbi观测解析的世界时之间的差值。
41、与现有技术相比,本发明具有以下有益效果:
42、本发明提供的基于光纤陀螺的世界时观测解析方法,从光纤陀螺仪原始观测数据中精确分离提取地球瞬时自转角速率值,建立地球自转角速率值与ut1的映射转换关系实现陀螺观测量向ut1的转换,充分发挥了光纤陀螺实时测量地球自转角速度的独特优势,使ut1服务系统具有更高的数据观测频次、更好的实时性和数据不滞后的优点,做到观测与数据解析同步进行,提高了ut1的时间分辨率。
43、本发明中,利用vlbi的精确观测结果对基于光纤陀螺的地球自转钟进行动态比对校准,可以消除光纤陀螺在长期观测过程中因漂移带来的影响,保证地球自转钟长期运行时的观测精度和稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/152161.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表