一种基于车道特征点的车端实时动态建图方法与流程
- 国知局
- 2024-07-30 10:41:01
本发明涉及自动驾驶,更具体地,涉及一种基于车道特征点的车端实时动态建图方法。
背景技术:
1、近几年来,自动驾驶技术的发展呈现出了越来越快的趋势,它被认为是未来智能出行的趋势方向。在自动驾驶技术中,高精地图是一个至关重要的组成部分,它可以大大提高汽车自动驾驶的安全性和实现效率。
2、当前自动驾驶车端使用的地图主要有如下两种:
3、1、提前预埋的高精度地图:但是高精度地图制作与维护成本过高、地图更新慢鲜度低以及国家法律法规监管,导致高精度地图方案在城市道路落地困难加大。
4、2、基于ai视觉实时构建的局部地图:需要依赖强大的ai算法,并且在天气、遮挡物等因素下感知数据可能会失效,目前在一些场景下纯视觉建图的准确性无法满足自动驾驶的需求。
5、因此,亟需研制一种具有更高的实时性、灵活性和精确度,以及更大的应用范围的应用于自动驾驶中的地图。
技术实现思路
1、针对现有技术的至少一个缺陷或改进需求,本发明提供了一种基于车道特征点的车端实时动态建图方法,用以克服提前预埋高精地图所致的高成本和低鲜度缺陷,并解决仅基于导航地图生成车道数据的精度问题。
2、为实现上述目的,本发明提供了一种基于车道特征点的车端实时动态建图方法,包括:
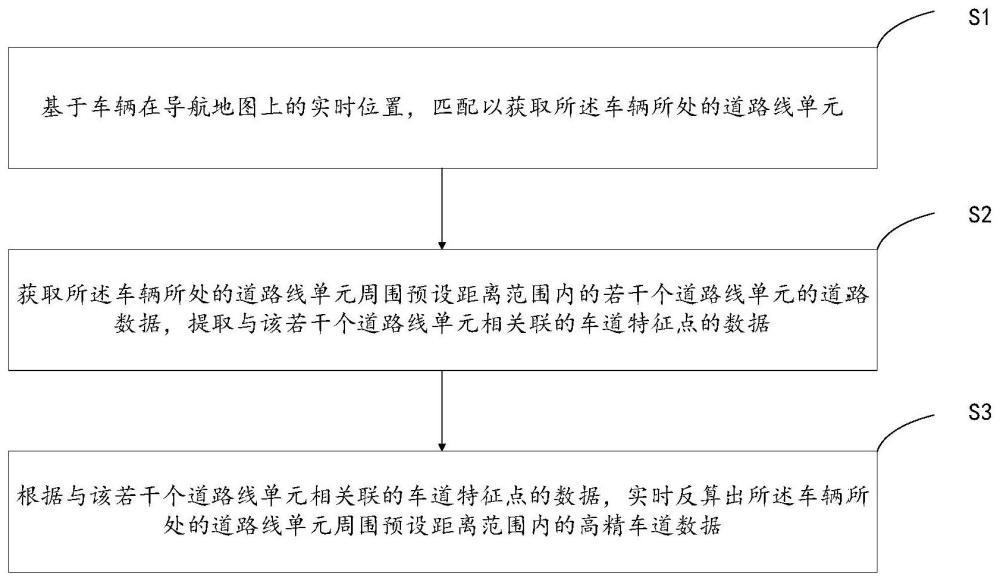
3、基于车辆在导航地图上的实时位置,匹配以获取所述车辆所处的道路线单元;
4、获取所述车辆所处的道路线单元周围预设距离范围内的若干个道路线单元的道路数据,提取与该若干个道路线单元相关联的车道特征点的数据;
5、根据与该若干个道路线单元相关联的车道特征点的数据,实时反算出所述车辆所处的道路线单元周围预设距离范围内的高精车道数据。
6、进一步地,所述道路数据包括有关道路线单元、道路点单元和车道特征点中的一种或多种数据;
7、道路线单元,导航地图中道路模型的基本单位;
8、道路点单元,道路线单元的端点或道路线单元间的交点;
9、车道特征点,位于相应车道的中心点位置的表征车道发生变化的关键点,表征包括车道属性、车道数属性、车道拓扑关系和相对道路线单元的位置中的一种或多种信息。
10、进一步地,所述根据与该若干个道路线单元相关联的车道特征点的数据,实时反算出所述车辆所处的道路线单元周围预设距离范围内的高精车道数据包括:
11、将该若干个道路线单元以若干种车道特征点场景为单元进行分割;
12、根据与该若干个道路线单元相关联的车道特征点的数据,将所分割以获取的若干个道路单元分别进行车道的形状、属性和边界的还原;
13、将所还原的若干个道路单元进行拼接以获取所述车辆所处的道路线单元周围预设距离范围内的高精车道数据。
14、进一步地,所述根据与该若干个道路线单元相关联的车道特征点的数据,将所分割以获取的若干个道路单元分别进行车道的形状、属性和边界的还原包括:
15、基于车道特征点切割相应的道路线单元,生成道路变化区间;
16、还原车道特征点的实际位置;
17、基于车道特征点的实际位置、车道数和车道宽度生成非道路变化区间的车道中心线;
18、基于车道拓扑关系,将生成的非道路变化区间的车道中心线的端点用直线连接,生成道路变化区间的车道中心线。
19、进一步地,所述车道特征点场景包括车线变化场景、分歧合流场景和路口场景中的一种或多种场景;所述道路变化区间包括车线变化区间、分歧合流区间和路口区间中的一种或多种;
20、车线变化场景,存在一个道路点单元只连接两条道路线单元的情形;两条道路线单元的车道数不一致;
21、分歧合流场景,存在一个道路点单元连接超过两条道路线单元的情形;由一条进入的道路线单元发散出多条驶出的道路线单元或者由多条进入的道路线单元汇聚成一条驶出的道路线单元;
22、路口场景,存在一个道路点单元连接超过两条道路线单元的情形;相互连接的道路线单元中存在路口内的道路线单元;
23、车线变化区间,包含车线变化场景的道路区间;
24、分歧合流区间,包含分歧合流场景的道路区间;
25、路口区间,包含路口场景的道路区间。
26、进一步地,所述基于车道特征点的实际位置、车道数和车道宽度生成非道路变化区间的车道中心线包括:
27、获取将车道特征点的实际位置投影到相应的道路线单元的车道特征点距离;
28、根据所述车道特征点距离,结合车道数和车道宽度,移动道路中心线的形点,生成非道路变化区间的车道中心线。
29、进一步地,所述基于车道拓扑关系,将生成的非道路变化区间的车道中心线的端点用直线连接,生成道路变化区间的车道中心线包括:
30、遍历获取一条道路线单元对应的一个或多个道路线单元;
31、基于车道拓扑关系,直线连接前后生成的非道路变化区间的车道中心线的端点,分别生成车线变化区间、分歧合流区间和路口区间的车道中心线。
32、进一步地,所述根据与该若干个道路线单元相关联的车道特征点的数据,将所分割以获取的若干个道路单元分别进行车道的形状、属性和边界的还原还包括:
33、若在非道路变化区间,则根据车道中心线和道路边界线的距离,向两侧平移车道中心线的形点,生成车道边界线;
34、若在道路变化区间,则将非道路变化区间的车道边界线的端点用直线连接。
35、进一步地,所述根据与该若干个道路线单元相关联的车道特征点的数据,将所分割以获取的若干个道路单元分别进行车道的形状、属性和边界的还原还包括:
36、获取类型为停止线类型的车道特征点;
37、还原该停止线类型的车道特征点的实际位置;
38、将还原的该停止线类型的车道特征点的实际位置点连接当前道路同方向两侧的车道中心线,生成相应的车道停止线。
39、进一步地,将端点用直线连接后均做圆拟合的平滑处理。
40、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
41、本发明基于传统的导航地图数据和车道特征点的输入,可以在车端实时还原出真实高精的车道数据并应用于自动驾驶中,避免了提前预埋高精地图的高成本和低鲜度,也解决了仅基于导航地图生成车道数据的精度问题,具有更高的实时性、灵活性和精确度。
技术特征:1.一种基于车道特征点的车端实时动态建图方法,其特征在于,包括:
2.如权利要求1所述的基于车道特征点的车端实时动态建图方法,其特征在于,所述道路数据包括有关道路线单元、道路点单元和车道特征点中的一种或多种数据;
3.如权利要求2所述的基于车道特征点的车端实时动态建图方法,其特征在于,所述根据与该若干个道路线单元相关联的车道特征点的数据,实时反算出所述车辆所处的道路线单元周围预设距离范围内的高精车道数据包括:
4.如权利要求3所述的基于车道特征点的车端实时动态建图方法,其特征在于,所述根据与该若干个道路线单元相关联的车道特征点的数据,将所分割以获取的若干个道路单元分别进行车道的形状、属性和边界的还原包括:
5.如权利要求4所述的基于车道特征点的车端实时动态建图方法,其特征在于,所述车道特征点场景包括车线变化场景、分歧合流场景和路口场景中的一种或多种场景;所述道路变化区间包括车线变化区间、分歧合流区间和路口区间中的一种或多种;
6.如权利要求4所述的基于车道特征点的车端实时动态建图方法,其特征在于,所述基于车道特征点的实际位置、车道数和车道宽度生成非道路变化区间的车道中心线包括:
7.如权利要求5所述的基于车道特征点的车端实时动态建图方法,其特征在于,所述基于车道拓扑关系,将生成的非道路变化区间的车道中心线的端点用直线连接,生成道路变化区间的车道中心线包括:
8.如权利要求4所述的基于车道特征点的车端实时动态建图方法,其特征在于,所述根据与该若干个道路线单元相关联的车道特征点的数据,将所分割以获取的若干个道路单元分别进行车道的形状、属性和边界的还原还包括:
9.如权利要求4所述的基于车道特征点的车端实时动态建图方法,其特征在于,所述根据与该若干个道路线单元相关联的车道特征点的数据,将所分割以获取的若干个道路单元分别进行车道的形状、属性和边界的还原还包括:
10.如权利要求4或8所述的基于车道特征点的车端实时动态建图方法,其特征在于,将端点用直线连接后均做圆拟合的平滑处理。
技术总结本发明公开了一种基于车道特征点的车端实时动态建图方法,包括:基于车辆在导航地图上的实时位置,匹配以获取所述车辆所处的道路线单元;获取所述车辆所处的道路线单元周围预设距离范围内的若干个道路线单元的道路数据,提取与该若干个道路线单元相关联的车道特征点的数据;根据与该若干个道路线单元相关联的车道特征点的数据,实时反算出所述车辆所处的道路线单元周围预设距离范围内的高精车道数据。本发明基于传统的导航地图数据和车道特征点的输入,可以在车端实时还原出真实高精的车道数据并应用于自动驾驶中,避免了提前预埋高精地图的高成本和低鲜度,也解决了仅基于导航地图生成车道数据的精度问题,具有更高的实时性、灵活性和精确度。技术研发人员:王军德,余慧兰,顿凯受保护的技术使用者:武汉光庭信息技术股份有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240730/153848.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表