局部连续性的矢量地图对齐方法、系统、设备及存储介质与流程
- 国知局
- 2024-07-30 10:53:26
本发明涉及自动驾驶,尤其涉及一种局部连续性的矢量地图对齐方法、系统、设备及存储介质。
背景技术:
1、使用众包方案生成高精度地图,需要克服众包数据定位精度低,标志要素识别不稳定的缺点,同时发挥其成本低、数据量大的优点。其中,局部地图要素匹配的质量非常关键。
2、在实际的产品化过程中,考虑到众包车数据收集设备的上行带宽限制,车端采集得到的局部地图都会进行压缩处理以减小数据量。数据压缩的方式是将栅格地图转化为线特征或面特征地图,在后端处理的时候,基于点云配准的匹配方法就不再适用于众包特征地图的匹配。而且,在压缩的过程中原始数据中的许多隐含信息被丢弃,语义信息生成算法同时又会引入一些误差,也为匹配带来了困难。导致现有的基于小尺度局部特征的匹配对齐算法成功率较低。
3、由于低成本里程计的累积误差,局部地图的构造过程会引入缓慢的形变,导致局部地图在大尺度上的一致性无法保证。因此,如何实现局部矢量地图的快速鲁棒对齐成为一个亟待解决的问题。
4、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种局部连续性的矢量地图对齐方法、系统、设备及存储介质,旨在解决如何实现局部矢量地图的快速鲁棒对齐的技术问题。
2、为实现上述目的,本发明提供了一种局部连续性的矢量地图对齐方法,所述局部连续性的矢量地图对齐方法包括:
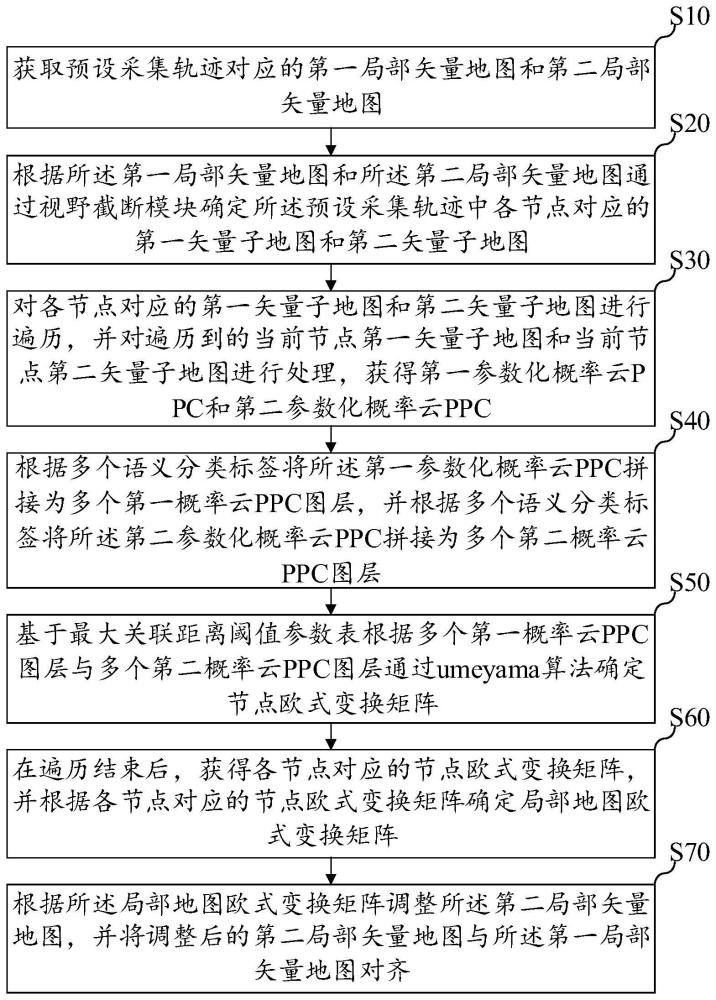
3、获取预设采集轨迹对应的第一局部矢量地图和第二局部矢量地图;
4、根据所述第一局部矢量地图和所述第二局部矢量地图通过视野截断模块确定所述预设采集轨迹中各节点对应的第一矢量子地图和第二矢量子地图;
5、对各节点对应的第一矢量子地图和第二矢量子地图进行遍历,并对遍历到的当前节点第一矢量子地图和当前节点第二矢量子地图进行处理,获得第一参数化概率云ppc和第二参数化概率云ppc;
6、根据多个语义分类标签将所述第一参数化概率云ppc拼接为多个第一概率云ppc图层,并根据多个语义分类标签将所述第二参数化概率云ppc拼接为多个第二概率云ppc图层;
7、基于最大关联距离阈值参数表根据多个第一概率云ppc图层与多个第二概率云ppc图层通过umeyama算法确定节点欧式变换矩阵;
8、在遍历结束后,获得各节点对应的节点欧式变换矩阵,并根据各节点对应的节点欧式变换矩阵确定局部地图欧式变换矩阵;
9、根据所述局部地图欧式变换矩阵调整所述第二局部矢量地图,并将调整后的第二局部矢量地图与所述第一局部矢量地图对齐。
10、可选地,所述根据所述第一局部矢量地图通过视野截断模块确定所述预设采集轨迹中各节点对应的第一矢量子地图的步骤,包括:
11、根据所述第一局部矢量地图确定所述预设采集轨迹对应的节点信息;
12、根据所述节点信息通过视野截断模块确定节点视野范围信息;
13、根据所述节点视野范围信息确定所述预设采集轨迹中各节点对应的第一矢量子地图。
14、可选地,所述对遍历到的当前节点第一矢量子地图进行处理,获得第一参数化概率云ppc的步骤,包括:
15、根据所述第一局部矢量地图确定多个语义分类标签;
16、分别确定多个语义分类标签对应的采样间隔,并根据多个语义分类标签及各语义分类标签对应的采样间隔生成采样间隔参数表;
17、根据所述采样间隔参数表对遍历到的当前节点第一矢量子地图中各道路标志物的几何图像进行间隔采样,得到第一参数化概率云ppc。
18、可选地,所述基于最大关联距离阈值参数表根据多个第一概率云ppc图层与多个第二概率云ppc图层通过umeyama算法确定节点欧式变换数据的步骤之前,还包括:
19、确定各语义分类标签对应的局部建图误差标准差及最邻近类型目标间隔;
20、根据所述局部建图误差标准差及所述最邻近类型目标间隔确定各语义分类标签对应的最大关联距离阈值;
21、根据多个语义分类标签及各语义分类标签对应的最大关联距离阈值生成最大关联距离阈值参数表。
22、可选地,所述基于最大关联距离阈值参数表根据多个第一概率云ppc图层与多个第二概率云ppc图层通过umeyama算法确定节点欧式变换矩阵的步骤,包括:
23、根据多个第二概率云ppc图层中对应的点信息构建kd树;
24、基于所述最大关联距离阈值参数表根据多个第一概率云ppc图层和多个第二概率云ppc图层通过所述kd树确定最近邻点对;
25、根据所述最近邻点对通过umeyama算法确定节点欧式变换矩阵。
26、此外,为实现上述目的,本发明还提出一种局部连续性的矢量地图对齐系统,所述局部连续性的矢量地图对齐系统包括:
27、获取模块,用于获取预设采集轨迹对应的第一局部矢量地图和第二局部矢量地图;
28、截断模块,用于根据所述第一局部矢量地图和所述第二局部矢量地图通过视野截断模块确定所述预设采集轨迹中各节点对应的第一矢量子地图和第二矢量子地图;
29、遍历模块,用于对各节点对应的第一矢量子地图和第二矢量子地图进行遍历,并对遍历到的当前节点第一矢量子地图和当前节点第二矢量子地图进行处理,获得第一参数化概率云ppc和第二参数化概率云ppc;
30、所述遍历模块,还用于根据多个语义分类标签将所述第一参数化概率云ppc拼接为多个第一概率云ppc图层,并根据多个语义分类标签将所述第二参数化概率云ppc拼接为多个第二概率云ppc图层;
31、所述遍历模块,还用于基于最大关联距离阈值参数表根据多个第一概率云ppc图层与多个第二概率云ppc图层通过umeyama算法确定节点欧式变换矩阵;
32、所述遍历模块,还用于在遍历结束后,获得各节点对应的节点欧式变换矩阵,并根据各节点对应的节点欧式变换矩阵确定局部地图欧式变换矩阵;
33、对齐模块,用于根据所述局部地图欧式变换矩阵调整所述第二局部矢量地图,并将调整后的第二局部矢量地图与所述第一局部矢量地图对齐。
34、此外,为实现上述目的,本发明还提出一种局部连续性的矢量地图对齐设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的局部连续性的矢量地图对齐程序,所述局部连续性的矢量地图对齐程序配置为实现如上文所述的局部连续性的矢量地图对齐方法的步骤。
35、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有局部连续性的矢量地图对齐程序,所述局部连续性的矢量地图对齐程序被处理器执行时实现如上文所述的局部连续性的矢量地图对齐方法的步骤。
36、本发明首先获取预设采集轨迹对应的第一局部矢量地图和第二局部矢量地图,然后根据第一局部矢量地图和第二局部矢量地图通过视野截断模块确定预设采集轨迹中各节点对应的第一矢量子地图和第二矢量子地图,对各节点对应的第一矢量子地图和第二矢量子地图进行遍历,并对遍历到的当前节点第一矢量子地图和当前节点第二矢量子地图进行处理,获得第一参数化概率云ppc和第二参数化概率云ppc,根据多个语义分类标签将第一参数化概率云ppc拼接为多个第一概率云ppc图层,并根据多个语义分类标签将第二参数化概率云ppc拼接为多个第二概率云ppc图层,基于最大关联距离阈值参数表根据多个第一概率云ppc图层与多个第二概率云ppc图层通过umeya ma算法确定节点欧式变换矩阵,在遍历结束后,获得各节点对应的节点欧式变换矩阵,并根据各节点对应的节点欧式变换矩阵确定局部地图欧式变换矩阵,之后根据局部地图欧式变换矩阵调整第二局部矢量地图,并将调整后的第二局部矢量地图与第一局部矢量地图对齐。相较于现有技术中数据压缩的方式是将栅格地图转化为线特征或面特征地图,在后端处理的时候,基于点云配准的匹配方法就不再适用于众包特征地图的匹配,而本发明利用局部地图小尺度上的形状一致性,实现局部矢量地图的快速鲁棒对齐。
本文地址:https://www.jishuxx.com/zhuanli/20240730/154786.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表