一种应用于科里奥利质量流量计的驱动控制方法
- 国知局
- 2024-07-30 10:53:37
本发明涉及智能化仪器仪表领域,具体涉及一种应用于科里奥利质量流量计的驱动控制方法。
背景技术:
0、技术背景
1、科里奥利质量流量计(cmf,简称科式流量计)是一种多功能、宽范围、高精度的直接式质量流量计,科式流量计基于科里奥利原理实现对流体质量的直接测量,不易受被测流体的物理特性(温度、密度、粘度等)的影响,具有良好的稳定性和高的测量精度。此外,科式流量计结构简单、空间占用少、无严格的环境条件要求、不易磨损,适用于各种复杂或条件苛刻的工业现场。凭借精度高、稳定性强、应用场景广泛的优势,科式流量计在近四十年来取得了飞速的发展,1995年科式流量计全球范围销售额为2.35亿美元;至2011年科式流量计的全球年平均销售额已达到4.2亿美元。近几年来随着交接计量、环境保护、精细化管理要求的提升,2019年全球科式流量计市场规模增至19亿美元并以年增速11%继续增长,根据预测至2025年,科式流量计全球销售额将达到26亿美元。
2、对于科里奥利质量流量计而言,高效、稳定的驱动系统是其测量精度的重要保证,理想驱动系统必须能够为测量管提供足够的驱动力,且能够使测量管位于其谐振频率附近做恒幅度的周期性振动。由于技术的限制,传统的科式流量计采用模拟电路处理信号,这种驱动方案的振幅控制采用自动增益控制回路提供可变增益,提供随着检测误差变化而变化的校正电压,进而实现稳定的闭环控制;频率控制采用锁相环或自激振动的选频特性进行幅度控制;这种处理方式对硬件中元器件的特性以及信号调理部分的对称性要求非常高,导致模拟电路抗干扰能力弱以及会对信号的相位产生影响,而不能有效的计算出两路信号间气体的相位差。因此对变送器性能的改良(主要包括信号处理模块与驱动模块的改进)成为研究热点。ko等人提出了驱动模式和科里奥利模式的匹配方法,使用负反馈来调节频率。clarke提出了非线性控制科氏流量计的振荡幅度的方法,并给出了增益的确定方法。高准公司为进一步改进和提高科里奥利质量流量计的性能推出了以dsp为核心的mvd(multi-variable digital)技术的流量计,其中采用了数字信号处理技术极大的提高了测量精度、扩展了测量量程。国内主要针对数字式变送器开展研究,其中合肥工大的徐科军教授带领的课题组在这一方面做了很多研究。李叶、赵静蕾等人提出了基于dsp系统的数字式变送系统(李叶.科里奥利质量流量计数字信号处理算法的研究与实现[d].合肥工业大学,2010.),相比模拟变送器系统在测量精度和稳定性上都有极大的提升,但无法实现对于幅值控制参数的自适应调整,仁建新等人提出一种基于自适应神经网络滑膜控制的幅值控制方法,但需要提前获得测量管的阻尼、刚度等物理参数才可进行设计;刘文等人提出全数字驱动系统(一种科里奥利质量流量计驱动方法:107884018[p]2018-04-06),用fpga代替模拟驱动。fpga虽有较强的抗干扰能力和较快的响应速度,然而,该研究方案使用的基于变比例参数的幅值控制算法虽然能够有限的实现幅值控制,但是其幅值稳定速度和精度还有待提高。
技术实现思路
1、本发明的目的在于保证科里奥利测量管在测量过程中维持传感器信号幅值的稳定性,特别是在两相流的复杂应用情况下,以及提高测量管对外部环境影响抗干扰能力,并且提供一套有效的科里奥利质量流量计驱动控制系统设计方法。
2、本发明至少通过如下技术方案之一实现。
3、一种应用于科里奥利质量流量计的驱动控制方法,包括以下步骤:
4、步骤1、依据科里奥利质量流量计测量管振动特性和传感器信号的质量要求,设计驱动控制算法,设计以fpga为主控芯片的驱动控制平台;
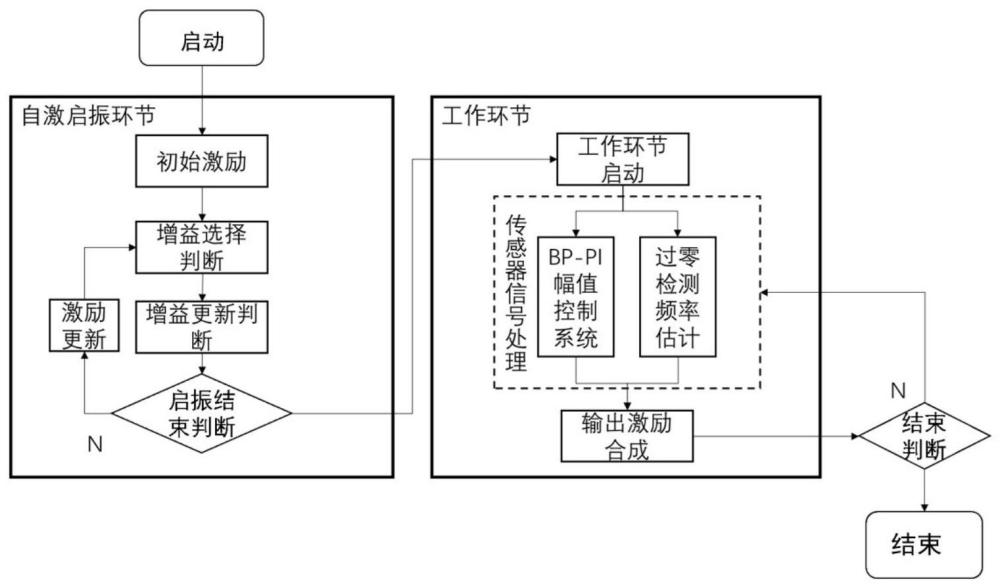
5、步骤2、控制驱动平台上启动初始化程序,测量管自激振动:采用正增益-零增益-负增益循环的直流信号对科里奥利质量流量计的测量管进行起振;
6、步骤3、从控制驱动平台上采集测量管检测线圈两端的位移信号,对位移信号进行预处理;
7、步骤4、对预处理后的信号做频率估计,通过过零检测法找到经过零点后的第一个采样点,以及该采样点前三个时刻的采样数据,将四个采样点作为拉格朗日四次插值的四个插值点拟合出拉格朗日曲线,并以二分法获得过零点的准确值,最后计算测测量管的整体固有频率。
8、步骤5、使用bp-pi控制算法,对预处理后的信号进行幅度控制;
9、步骤6、结合步骤4中获得的估计频率以及步骤5中获得的增益系数,使用直接频率合成技术以及乘法模数转换器得到所需的激励信号,该激励信号频率与传感器频率相同且能通过改变增益使传感器幅值维持稳定,保证优良的传感器信号质量,便于后续的数字信号分析。
10、进一步地,预处理包括低通滤波和滑动平均。
11、进一步地,步骤3中,低通滤波是指利用巴特沃斯低通滤波器对传感器信号进行低通滤波,其幅度平方函数表达式如下:
12、
13、其中,h(w)为滤波器幅度,l为滤波器的阶数,w为滤波器角频率,wc为截至频率;
14、滑动操作采用滑动平均算法,公式如下:
15、
16、其中,ft-l为数据编号为t-l的数据实际值,yt为数据编号为t的数据计算值,l为滑动平均的期数,t表示采样时间;对数据产生l-1个单位的偏移,因此前l-1个数据取数据实际值。
17、进一步地,步骤2中的自激振动,实现过程如下:
18、科式流量计控制系统启动后,fpga控制直接频率合成器生成恒定电压信号,同时设置较大的正增益q通过乘法模数转换器获得初始的正激励,当传感器信号的值到达设定阈值a时,增益的值变为0,直至测量管再次经过零点时,增益值变为-q,产生负向激励,当传感器信号到达-a时,增益再次变为0,同时将记录的传感器位移幅值最大值x与理想振幅b相减并以此为依据获得新的增益q′,实现变压启振,增益q的更新方式为:
19、q′=q+α(b-x)
20、其中α为加权因子,α<1,增益更新完成后,从下个测量管原点开始使用新的增益进行正激励-零激励-负激励的循环启振,当传感器位移幅值连续多次处于理想振幅的±5%内时,判定为启振环节完成。
21、进一步地,步骤4中,采用拉格朗日四次插值法计算出测量管输出信号振动频率的方法:通过过零检测得到零点后的第一个采样点数据以及该采样点前的三个数据点,四个点的数据值为y0、y1、y2、y3,由于采样周期t相等且已知,从y0到y3的任意时刻s的拉格朗日系数都可以计算得到,拉格朗日插值法计算公式如下:
22、
23、式中n表示从0到3的值,yn∈(y0、y1、y2、y3),i为相乘式子里的变量从0到3,t表示采样时间;采用二分法寻找零点所在的时刻,由于在处理器内运行,依据最小时刻单位确定二分次数。
24、进一步地,所述bp-pi幅值控制算法,具体实现过程如下:
25、pi控制以传感器幅值与理想情况下幅值的偏差作为输入,考虑在控制器中实现pi算法,pi控制算法以离散的增量式pi控制方法表示,描述为:
26、u(k)=kp[e(k)-e(k-1)]+kie(k)+u(k-1)
27、式中,kp和ki分别为pi控制算法中的比例和积分系数,k时间下的输入偏差和输出增益系数分别使用e(k)和u(k)表示。
28、进一步地,bp-pi控制算法是利用bp神经网络实时调整pi控制器的参数来实现对测量管幅值的精确控制。
29、进一步地,对于bp神经网络选用3-4-2的网络结构,输入层节点为三,包括当前时刻的传感器幅值与理想幅值的偏差、上一时刻传感器幅值与理想幅值的偏差以及上一时刻的增益值,隐藏层节点为四,激活函数选择sigmoid激活函数,输出层结点为二,其激活函数为正向的sigmoid激活函数,bp神经网络的两个输出为pi控制中的调整参数比例增益系数和积分系数。
30、进一步地,bp神经网络算法分为前向传播与后向反馈部分,其前向传播公式为:
31、
32、其中,x是输入参数,包括本时刻输入偏差以及前一时刻的输出增益和输入偏差,w(1)是隐藏层权值矩阵,b(1)是隐藏层偏置矩阵,z(1)是隐藏层输入矩阵,a(1)是隐藏层输出矩阵,w(2)是输出层权值矩阵,b(2)是输出层偏置矩阵,z(2)是输出层输入矩阵,a(2)是输出层的输出向量,输出pi控制算法的比例增益系数kp和积分系数ki;
33、权值与偏置的修正量通过后向反馈函数获得,其后向反馈函数为:
34、
35、各个权值与偏置更新时将原值加上修正量与学习率的乘积获得新的权值与偏置,再依据更新得权值与偏置前向传播得到新的比例增益系数和积分系数。
36、进一步地,根据测量管的控制要求,其损失函数e(k)为:
37、
38、其中rin(k)为k时刻测量管实际振幅与yout为理想振幅的差值。
39、相较于现有技术,本发明的有益效果为:
40、本发明以fpga为主控芯片的数字式测试系统的软硬件测试平台,实现了科里奥利质量流量计的稳定驱动控制,一定程度上解决了传统模拟驱动系统幅值不稳定,以及两相流下流量计停振的问题,提高传统驱动控制方案振幅控制能力,获得的激励信号频率与传感器频率相同且能通过改变增益使传感器幅值维持稳定,保证优良的传感器信号质量,避免测量管“停振”导致的流体质量失效问题,便于后续的数字信号分析,提高流体质量测量精度。
本文地址:https://www.jishuxx.com/zhuanli/20240730/154806.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
多功能消解仪的制作方法
下一篇
返回列表