超高速自由液面循环水槽试验段流场特性测量装置与方法与流程
- 国知局
- 2024-07-30 11:06:42
本发明涉及循环水槽流场特性测量,尤其是超高速自由液面循环水槽试验段流场特性测量装置与方法。
背景技术:
1、不同于闭式循环水槽和空泡水筒,超高速自由液面循环水槽是一种具有自由液面水流,应用于舰船喷水推进器流场及力特性测试的大型试验装置,目前,缺乏适用于这种具有自由液面的超高速循环水槽试验段流场特性的测量装置与方法。因此,提出超高速自由液面循环水槽试验段流场特性测量装置与方法,对具有自由液面的循环水槽流场特性学术研究和工程应用具有重要指导意义,也是超高速自由液面循环水槽试验段流场品质评判的关键测试技术。
技术实现思路
1、本发明的目的在于:提出一种超高速自由液面循环水槽试验段流场特性测量装置与方法,对不同来流工况下超高速自由液面循环水槽试验段主流区横截面流速的不均匀度、不稳定度和自由液面水平度进行精确测量,为试验段流场品质评判提供数据基础。
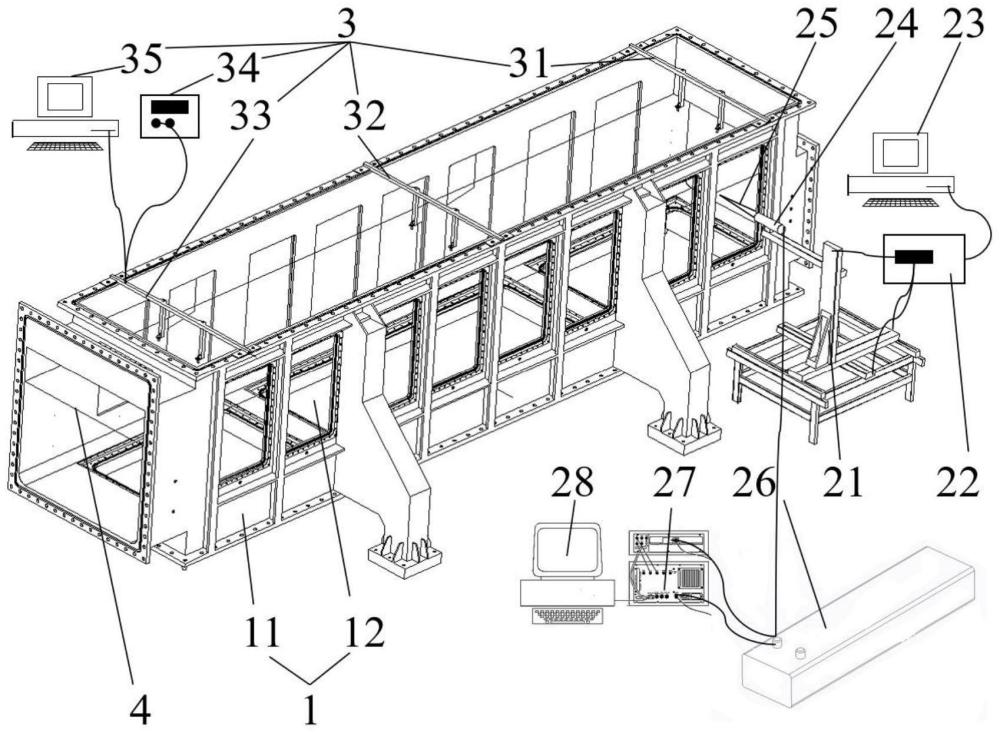
2、为实现上述目的,本发明的具体技术方案如下:超高速自由液面循环水槽试验段流场特性测量装置,包括超高速自由液面循环水槽试验段、ldv测速装置和自由液面水平度测量装置;
3、超高速自由液面循环水槽试验段包括不锈钢结构本体和多个透明有机玻璃观察窗,不锈钢结构本体无密封盖并与大气相通,多个透明有机玻璃观察窗用于超高速自由液面循环水槽试验段内流场观测;ldv测速装置设置于超高速自由液面循环水槽试验段侧面,用于测量超高速自由液面循环水槽试验段内流场流速分布;
4、自由液面水平度测量装置安装在超高速自由液面循环水槽试验段顶部,用于测量超高速自由液面循环水槽试验段内流场的自由液面水平度。
5、根据本发明,进一步地,所述的ldv速装置包括三维坐标架、三维坐标架控制器、三维坐标控制系统、激光探头、激光束、激光器、信号处理器和数据采集处理系统。
6、根据本发明,进一步地,所述的激光探头通过信号传输线与信号处理器、激光器相连,信号处理器通过电线与数据采集处理系统相连,激光器用于产生测速用激光束并通过激光探头发射交汇到超高速自由液面循环水槽试验段内流场流速测量点,流场中的运动微粒在流速测量点形成的多普勒信号经过激光探头传递到信号处理器进行信号处理,处理后的信号经过所述数据采集处理系统计算得到超高速自由液面循环水槽试验段内流场流速测量点的流速。
7、根据本发明,进一步地,所述的三维坐标架通过电线与三维坐标架控制器相连,三维坐标架控制器通过电线与三维坐标控制系统相连,激光探头安装在三维坐标架上,通过三维坐标控制系统输入坐标移动命令利用三维坐标架控制器实现安装在三维坐标架上激光探头的移动,进而实现超高速自由液面循环水槽试验段内流场流速测量点的位置移动。
8、根据本发明,进一步地,所述的自由液面水平度测量装置包括第一超声波测距装置、第二超声波测距装置、第三超声波测距装置、电源和信号采集处理系统;第一传感器定位架、第二传感器定位架和第三传感器定位架通过两端的螺栓定位孔安装到超高速自由液面循环水槽试验段顶部;第一超声波传感器、第二超声波传感器通过螺纹连接安装到第一传感器定位架上,并保持传感器测量面与自由液面平行;第三超声波传感器、第四超声波传感器通过螺纹连接安装到第二传感器定位架上,并保持传感器测量面与自由液面平行;第五超声波传感器、第六超声波传感器通过螺纹连接安装到第三传感器定位架上,并保持传感器测量面与自由液面平行;第一超声波传感器、第二超声波传感器、第三超声波传感器、第四超声波传感器、第五超声波传感器和第六超声波传感器均通过电线并联到电源并通过信号线与信号采集处理系统连接;3个传感器定位架用于6个超声波传感器的位置定位,6个超声波传感器用于测量超高速自由液面循环水槽试验段内自由液面到6个超声波传感器的距离;电源用于6个超声波传感器的供电,信号采集处理系统用于对6个超声波传感器产生的信号进行采集处理。
9、本发明还提供了一种超高速自由液面循环水槽试验段流场特性测量方法,其特征在于:包括如下步骤:
10、步骤一、通过循环水槽上水泵给试验段内加水至自由液面达到距超高速自由液面循环水槽试验段底面1.2m位置;
11、步骤二、在超高速自由液面循环水槽试验段顶部选取第一自由液面水平度测量点、第二自由液面水平度测量点、第三自由液面水平度测量点、第四自由液面水平度测量点、第五自由液面水平度测量点、第六自由液面水平度测量点,在循环水槽试验段顶端面安装第一超声波测距装置、第二超声波测距装置和第三超声波测距装置,使每个超声波传感器位于对应的各水平度测量测点,且超声波传感器测量端面与自由液面平行;
12、步骤三、循环水槽运行前,试验段自由液面静止且保持水平,使用超声波传感器测得各超声波传感器测量端面到自由液面的距离hs,各水平度测量测点与#1测点初始高度差δhsi:
13、δhsi=hsi-hs1,(1)
14、式中,hsi为各水平度测量测点处超声波传感器测量端面到自由液面的距离,其中i为为各水平度测量测点编号,hs1为#1测点处超声波传感器测量端面到自由液面的距离;
15、步骤四、在循环水槽试验段内选取三个流速测量截面,在每个测量截面的主流区划定测量区域并在划定的测量区域内均匀的选取流速测量点;
16、步骤五、安放ldv测速装置,使激光探头的镜头面向循环水槽透明有机玻璃观察窗,垂直于试验段内流场流动方向,通过控制三维坐标架移动激光探头,使激光探头发射的激光束交汇点可以准确移动到测量区域内各个流速测量点;
17、步骤六、设定试验工况,启动循环水槽主循环泵和辅助泵,通过调节循环水槽主循环泵、辅助泵、上水泵和放水阀使得循环水槽试验段内流场流速达到试验工况;
18、步骤七、待循环水槽试验段内流流动稳定后使用固定在自由液面上方的超声波传感器测得各传感器测量端面到自由液面的距离ht。超声波传感器数据采集满1分钟后停止测量,各水平度测量测点与#1测点试验高度差δhti:
19、δhti=hti-ht1,(2)
20、式中,hti为各水平度测量测点处超声波传感器测量端面到自由液面的距离,其中i为为各水平度测量测点编号,ht1为#1测点处超声波传感器测量端面到自由液面的距离,经过计算得到设定工况下循环水槽试验段中流场自由液面的水平度δh:
21、δh=0.5×{(δh5-δh1)-(δh6-δh2)},(3)
22、δhi=δhti-δhsi,(4)
23、式中,δhi为各水平度测量测点处试验高度差与初始高度差之间的差值;
24、步骤八、使用ldv测速装置对测量区域内的测量点速度进行测量,当速度测量有效值达到2000(个)后停止该测点的采集,并将激光探头移动至下一个测点位置直至采集完每一个测量点上的速度,基于测量区域内测量点速度数据采用不均匀度cs来评估流场流速分布的均匀性,不均匀度cs表达式如下:
25、
26、式中,ui为测量区域内各测量点测量速度值,u测量区域内各测量点速度均值,n为测点数;
27、步骤九、选取各个流速测量截面中心点(x=900mm,y=600mm处)作为流速不稳定度测量点,使用ldv测速装置对截面中心点速度进行测量,当速度采集时间达到2min后停止该测点的采集,基于截面中心点速度数据采用不稳定度ct来评估流场流速的稳定性,不稳定度ct表达式如下:
28、
29、式中,ui为测量截面中心点测量速度值,为测量截面中心点速度均值,n为测点数。
30、本发明带来的有益效果为:ldv测速装置和自由液面水平度测量装置对不同来流工况下超高速自由液面循环水槽试验段主流区横截面流速的不均匀度、不稳定度和自由液面水平度进行精确测量,为具有自由液面的超高速循环水槽试验段流场品质评判提供了测量依据,具有方便操作、测量精确、方便更换的优点。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155482.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表