一种预测城市低空场景末端物流无人机规划航线飞行定位偏差的方法
- 国知局
- 2024-07-30 11:06:49
背景技术:
1、随着无人机技术的发展和2023年中央经济工作会议提出打造低空经济等若干战略性新兴产业,无人机物流产业呈现巨大的市场潜力,其中末端物流无人机应用场景的出现为解决偏远地区和城市场景对时效性要求较高物品配送“最后一公里”的问题提供了有效方案。一方面,末端物流无人机大多属于轻、小型运行高度在120m以下,即末端物流无人机运行区域(空间)大多在城市天际线以下,与此同时,轻小型无人机的定位往往只依靠北斗、gps等卫星定位方式实现定位,但是由于城市高层建筑物的遮挡导致卫星定位的精度存在空间差异性(异质性);另一方面,由于城市建筑物高度、分布(三维空间形态)的不同导致城市内不同区域的风向、风速、温度等气象条件也存在空间差异性。
2、目前为了确保无人机规划航线的运行安全,主要通过提高定位精度(如多源数据融合定位、增加rtk设备、合作目标感知一体化等方法)和运行前实地校验飞行与运行时实时监控相结合两种方式,来确保无人机规划航线实际运行的安全。其中,前者一方面依赖无人机本身搭载的传感器设备的同时需要低空气象站、通信导航和监视等设备的有效布局,主要针对中大型无人机,该方式一方面增加基础设施投资成本,与此同时无人机加装传感器无疑会降低无人机的续航,经济性较差;后者通过实地校验飞行的方式虽然可以在不增加基础设施投入和降低无人机的续航,主要针对微轻小型无人机,但是考虑到后期城市低空无人机航线的密集型、航线数量呈指数增长,该方式一方面运行前实地校验飞行无法满足未来城市低空物流无人机市场的需求,另一方面运行时实时监控无疑会增加运营成本和无人机管制员的工作压力。
3、综上可知,为了确保城市低空场景末端物流无人机规划航线的运行安全,关键点在于提高末端物流无人机的定位精度或对规划航线各位置的飞行定位偏差进行有效预测,其中前者通过增加机载传感器和地面基础设施的方式对于微轻小型末端物流无人机不具备实用性(无法加装传感器或可加装传感器但是严重影响续航),而后者对规划航线各位置的飞行定位偏差预测受限制于影响飞行定位偏差的因素较多目前尚无有效办法,例如城市低空不同区域的定位精度、风向、风力、气温等的空间差异性(异质性),所以目前为了确保城市低空场景末端物流无人机(主要指微轻小型无人机)规划航线运行的安全性主要通过运行前对每条规划航线进行实地校验飞行和运行时实时监控的方式,无法满足未来低空经济快速发展的需求。
技术实现思路
1、综合以上现有与无人机规划航线飞行定位偏差预测相关的技术及方案主要存在以下几点不足:
2、(1)由于无法在微轻小型无人机上加装机载传感器或加装后极大降低无人机的续航,导致该方式不适用于提高末端物流无人机规划航线飞行定位偏差的预测,即通过增加传感器降低飞行定位偏差的方式不适用于微轻小型无人机;
3、(2)由于通过增加地面基础设施的方式,会极大的增加地方财政投入,无法满足末端物流无人机的市场需求和经济性较差,即通过增加地面通信、导航和监视(cns)等设施的方式缺乏经济性;
4、(3)目前确保末端物流无人机运行安全主要通过运行前对每条规划航线进行实地校验飞行和运行时实时监控的方式,该方式一方面无法满足低空经济快速发展的需求,实现末端物流无人机的快速推广,另一方面增加无人机远程管制员的工作量,即通过人工运行前勘察和运行时实时监控的方式无法满足低空经济快速发展的实际需求。
5、针对上述不足,本发明从构建城市建筑物分布曲线数学特征与飞行定位偏差之间的时空关系角度出发,借助于地理学中的时空地理加权回归(gtwr)方法,构建城市建筑物分布曲线数学特征与飞行定位偏差关系模型,从而提出一种预测城市低空场景末端物流无人机规划航线飞行定位偏差的方法。
6、本发明的基本思路是通过得到对末端物流无人机的规划航线历史数据和周边建筑物分布曲线数学特征数据,基于gtwr方法构建城市建筑物分布曲线数学特征与飞行定位偏差关系模型,从而完成城市低空场景末端物流无人机新规划航线在任意位置飞行定位偏差的预测,在不加装无人机传感器和地面基础设施的情况下,确保末端物流无人机新规划航线的安全。
7、本发明采用的具体技术方案如下:
8、一种预测城市低空场景末端物流无人机规划航线飞行定位偏差的方法,具体步骤如下:
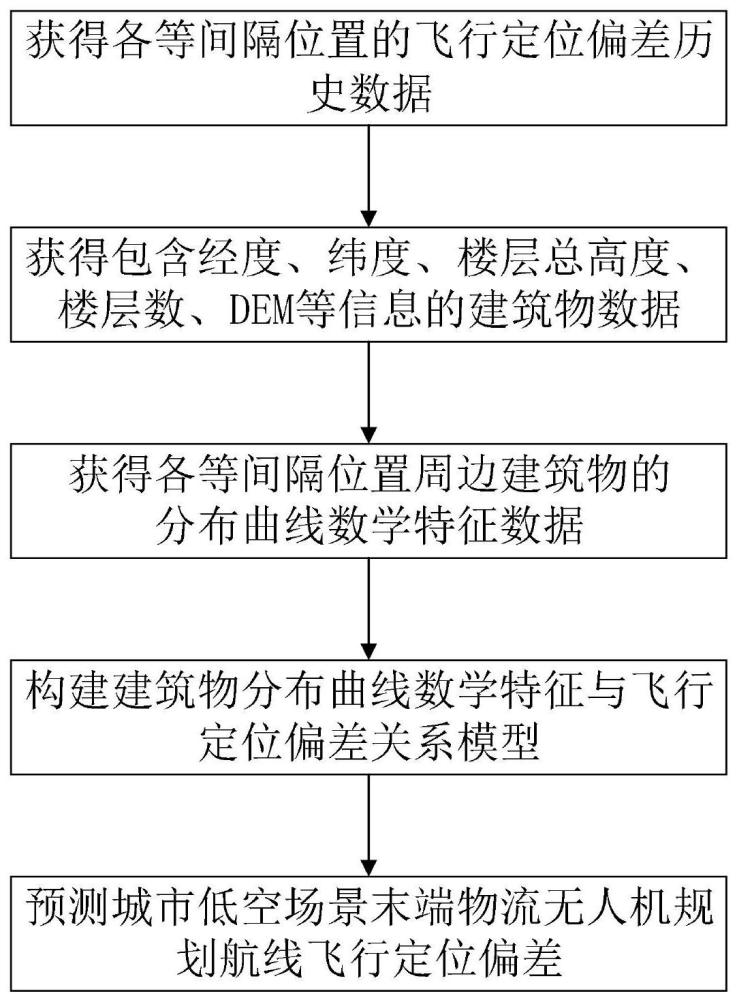
9、s1,根据末端物流无人机规划航线和实际运行航线历史数据获得各等间隔位置的飞行定位偏差历史数据,其中,间隔大小为飞行定位偏差历史数据的最大值;
10、s2,对末端物流无人机规划航线三维缓冲区内建筑物进行倾斜摄影建模和单体化,获得各等间隔位置周边包含经度、纬度、楼层总高度、楼层数、数字高程模型(digitalelevation model,dem)等信息的建筑物数据,其中,三维缓冲区半径为飞行定位偏差历史数据的最大值;
11、s3,基于urbantexture v1.0软件和各等间隔位置周边建筑物数据,获得各等间隔位置周边建筑物的分布曲线数学特征数据;
12、s4,基于各等间隔位置的飞行定位偏差历史数据和周边建筑物的分布曲线数学特征数据,利用时空地理加权回归(geographical and temporal weighted regression,gtwr)方法,分析各等间隔位置周边建筑物的分布曲线数学特征与飞行定位偏差之间的时空关系,构建建筑物分布曲线数学特征与飞行定位偏差关系模型;
13、s5,基于建筑物分布曲线数学特征与飞行定位偏差关系模型、末端物流无人机新规划航线各等间隔位置周边建筑物的包含经度、纬度、楼层总高度、楼层数、dem等信息的建筑物数据和分布曲线特征数据,从而实现城市低空场景末端物流无人机规划航线飞行定位偏差的预测。
14、进一步地,所述步骤s1中,根据末端物流无人机规划航线和实际运行航线历史数据,计算并获得各等间隔位置的飞行定位偏差历史数据三维向量集{v1,v2,…,vn},其中,各等间隔位置的飞行定位偏差三维向量为vn=[xn-xn’,yn-yn’,zn-zn’],(xn,yn,zn)、(xn’,yn’,zn’)分别表示第n个等间隔位置末端物流无人机规划航线和实际运行航线历史数据的三维坐标;间隔大小d为末端物流无人机规划航线和实际运行航线历史数据之间偏差的最大值,即d=max{|xn-xn’|,|yn-yn’|,|zn-zn’|}。
15、进一步地,所述步骤s2中,首先利用搭载多视角摄像头无人机,对末端物流无人机历史航线三维缓冲区所包含的城市建筑物进行航拍并用context capture软件进行倾斜摄影建模,得到末端物流无人机历史航线周边的城市建筑物倾斜摄影模型数据和dem数据;然后将n个等间隔位置三维缓冲区(三维缓冲区半径为d)周边的倾斜摄影模型数据和dem数据导入到supermap iserver、svsmodeler、osketch等软件中进行单体化操作,得到n个等间隔位置周边建筑物的经度(平面几何中心)、维度(平面几何中心)、楼层总高度、楼层数、dem高度值等信息的.csv格式数据。
16、进一步地,所述步骤s3中,基于urbantexture v1.0软件和各等间隔位置周边建筑物.cs v格式数据,将步骤s2得到的包含经度(平面几何中心)、维度(平面几何中心)、楼层总高度、楼层数、dem高度值等信息的n个等间隔位置周边城市建筑物.csv格式数据导入到urb antexture v1.0软件进行n个等间隔位置周边建筑物分布曲线数学特征的提取(软件下载地址:https://www.urbancomp.net/archives/urban-texture-v10-3d-urban-texture-computing-software-based-on-improved-rdf),从而获得各等间隔位置周围建筑物的分布曲线数学特征数据{cvn,bn,shn,skn,kn,fpn,mpn,fpan,mpan,tgn},其中,cv、b、sh、sk、k、fp、mp、fpa、mpa、tg为描述建筑物分布曲线数学特征的参数(参考文献:qingfengguan,yao yao,teng ma,e t al(2021):a 3d urban texture model and itsrelationship with urban land surface temper ature,annals of the americanassociation of geographers,doi:10.1080/24694452.2021.1972790)。
17、进一步地,所述步骤s4中,基于步骤s1得到的末端物流无人机在各等间隔位置飞行定位偏差历史数据vn=(xn-xn’,yn-yn’,zn-zn’)和步骤s3得到的各等间隔位置周围建筑物的分布曲线数学特征数据{cvn,bn,shn,skn,kn,fpn,mpn,fpan,mpan,tgn},利用时空地理加权回归(gtwr)方法,分析各等间隔位置周边建筑物分布曲线数学特征与飞行定位偏差之间的时空关系,构建城市建筑物分布曲线数学特征与飞行定位偏差关系模型。
18、进一步地,所述步骤s5中,基于步骤s4得到的建筑物分布曲线数学特征与飞行定位偏差关系模型,通过对末端物流无人机新规划的航线周边建筑物进行步骤s2的倾斜摄影建模和单体化和步骤s3的分布曲线数学特征提取,可以得到新规划航线各等间隔位置处飞行定位偏差的预测值,从而实现城市低空场景末端物流无人机规划航线飞行定位偏差的预测。
19、本发明的技术特点及有益效果:
20、1、本发明从构建城市建筑物分布曲线数学特征与飞行定位偏差之间的时空关系角度出发,借助于地理学中的时空地理加权回归(gtwr)方法,构建城市建筑物分布曲线数学特征与飞行定位偏差关系模型,从而提出一种预测城市低空场景末端物流无人机规划航线飞行定位偏差的方法;
21、2、本发明通过构建建筑物分布曲线数学特征和飞行定位偏差之间的关系,由于城市低空场景不同区域的建筑物分布三维空间形态曲线数学特征(即建筑物三维空间形态)与该区域的风向、风速、温度等影响末端物流无人机飞行定位偏差的因素都有关系,故只需知道末端物流无人机新规划航线周边建筑物三维空间形态即可实现飞行定位偏差的预测,在不加装无人机传感器和地面基础设施的情况下,确保末端物流无人机新规划航线的安全,满足未来末端物流无人机等低空经济新应用场景快速发展的需求。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155494.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表