一种自动标定方法、系统及计算机可读存储介质与流程
- 国知局
- 2024-07-30 11:15:29
本技术涉及传感器标定,尤其是涉及一种自动标定方法、系统及计算机可读存储介质。
背景技术:
1、自动驾驶和adas系统需要准确地感知周围环境,以便进行安全、高效的驾驶决策。摄像头和毫米波雷达是两种常用的传感器,用于感知车辆周围的物体和环境。它们有各自的优点,比如摄像头提供高分辨率的图像和物体视觉信息,可以更好地识别道路标志、车辆、行人等;雷达在不受天气和光线条件的影响下可以测量物体的位置和速度。但它们也有各自的弱点,比如摄像头正常工作需要合适的光线条件,夜间或低光照的条件,大雾,雨天的环境下都无法正常工作。相比激光雷达和摄像头,毫米波雷达分辨率较低,在检测目标时可能会误判或漏检某些障碍物。
2、由于这些传感器存在各自的局限性和限制,显然仅靠单一传感器则无法满足自动驾驶和adas系统日益增长的对周围环境进行准确感知的要求,从而影响系统的安全性和性能。而通过传感器融合(包括多个相同传感器的融合,不同传感器的融合)能够取长补短,为了将不同传感器感知的物体准确地融合便于进一步的信息处理,摄像头和雷达都必须进行外部标定,即它们相对于共同参考点的平移和旋转为后续感知融合算法的准确性和稳定性提供了保证,从而提高了道路交通安全,减少事故发生。
技术实现思路
1、针对上述技术问题,本技术提出一种自动标定方法、系统及计算机可读存储介质。
2、第一方面,本技术提供一种自动标定方法,包括:
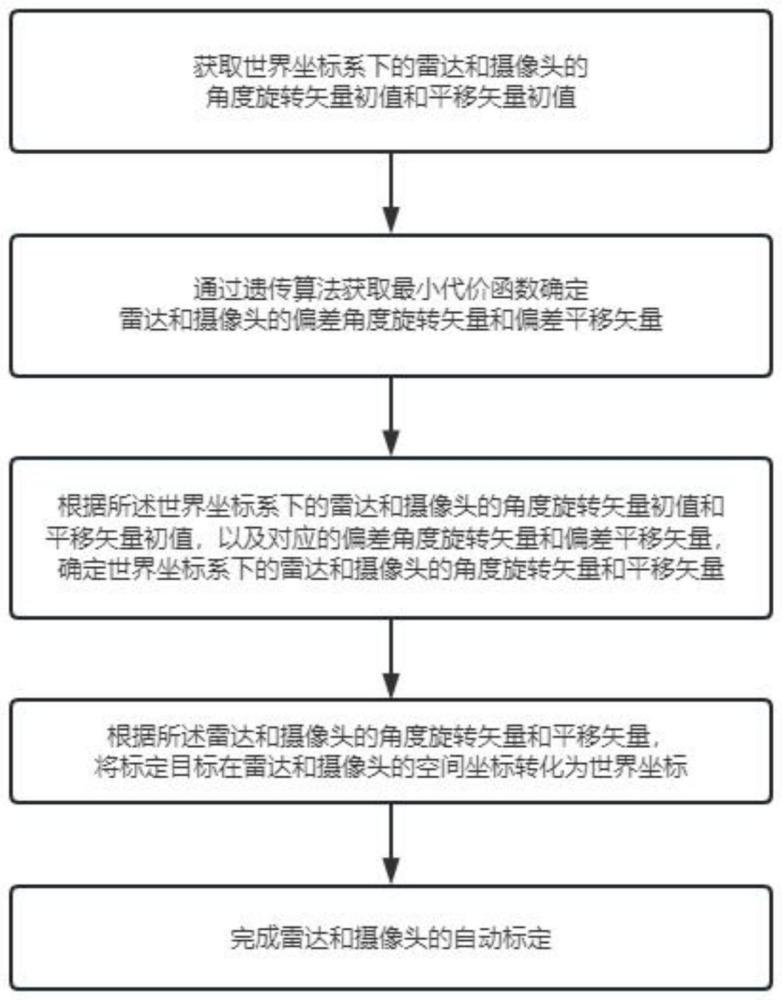
3、s1:获取世界坐标系下的雷达和摄像头的角度旋转矢量初值和平移矢量初值。
4、进一步的,所述角度旋转矢量初值为雷达或摄像头相对于世界坐标原点的偏航角、俯仰角和横滚角。
5、s2:通过遗传算法获取最小代价函数确定雷达和摄像头的偏差角度旋转矢量和偏差平移矢量。
6、进一步的,所述步骤s2,具体为:
7、s210:每个雷达或摄像头的偏差角度旋转矢量和偏差平移矢量生成预设数目的随机数据种群;
8、s220:所述随机数据种群中一随机成员生成代价函数;
9、其中,所述步骤s220,具体为:
10、s221:生成所述随机成员的随机旋转偏差参数和随机平移偏差参数,并结合旋转矢量初值和平移矢量初值产生旋转参数和平移参数,将每个标定目标在雷达坐标下的位置映射到摄像头图像中;
11、进一步的,该数据种群中的第i个随机成员生成的旋转和平移参数:
12、
13、s222:根据所述旋转参数和平移参数计算每个标定目标映射的像素坐标;
14、进一步的,所述像素坐标为(uprojected,vprojected);
15、s223:获取标定目标在雷达和摄像头重叠fov内的摄像头的摄像头图像的像素参考坐标(uideal,videal),并将所述像素坐标(uprojected,vprojected)与所述像素参考坐标(uideal,videal)进行比对,得到像素误差;
16、进一步的,所述获取标定目标在雷达和摄像头重叠fov内的摄像头的摄像头图像的像素参考坐标,具体为:
17、s20:将标定目标在摄像头的摄像头图像进行预处理,所述预处理至少包括:降噪和增强对比度;
18、s21:根据标定目标的特征,通过图像分割算法将标定目标从预处理图像中分割;
19、进一步的,所述标定目标的特征,至少包括标定目标的颜色、纹理和边缘等特征,使不同区域具有不同的特征表示。
20、进一步的,所述图像分割算法至少包括阈值的分割、边缘检测、区域生长等。
21、s22:边界提取,根据获取的标定目标分割图像提取标定目标的边界信息,确定标定目标的轮廓;
22、s23:根据所述标定目标的轮廓,计算标定目标区域的质心坐标或边界框的中心坐标,得到标定目标在雷达和摄像头重叠fov内的摄像头的摄像头图像的像素参考坐标,其中,质心坐标是标定目标像素点的平均值,边界框的中心坐标是标定目标边界框的中心点。
23、进一步的,测量每个标定目标与雷达的径向距离rrad,水平角φrad和俯仰角θrad,以及在摄像头图像中的像素参考坐标,判断所述标定目标是否位于雷达和摄像头的重叠fov内,若所述标定目标在雷达和摄像头的重叠fov之外,则将该区域标记为“不适用区域”,否则,将所述标定目标在所述重叠fov的雷达和摄像头进行自动标定。
24、进一步的,所述像素参考坐标为(uideal,videal),所述像素误差为
25、
26、s224:所述随机成员的代价函数至少包括像素误差平方的加权平均;
27、进一步的,第i个成员的代价函数为
28、其中,m为数据种群数目,加权系数αm可以设置为具有更高置信度的标定目标赋予更大的权重。
29、s230:选取获得最小代价函数的成员作为种群父母,所述种群父母随机选择进行交叉操作生成下一代个体,其中,所述交叉操作产生的下一代是新种类但不发生突变的种群;
30、s240:引入随机变异操作生成突变个体;
31、s250:在新的种群中的新个体计算代价函数,若所述新个体的最小代价函数低于预设阈值,则终止迭代,选择该成员作为偏差角度旋转矢量的最优估计值和偏差平移矢量的最优估计值,反之返回步骤s220。
32、进一步的,雷达的角度旋转矢量初值和偏差角度旋转矢量的最优估计值构成雷达的角度旋转矢量,即雷达的平移矢量初值和偏差平移矢量的最优估计值构成雷达的平移矢量,即同理,摄像头的角度旋转矢量初值和偏差角度旋转矢量的最优估计值构成摄像头的角度旋转矢量,摄像头的平移矢量初值和偏差平移矢量的最优估计值构成摄像头的平移矢量。
33、s3:根据所述世界坐标系下的雷达和摄像头的角度旋转矢量初值和平移矢量初值,以及对应的偏差角度旋转矢量和偏差平移矢量,确定世界坐标系下的雷达和摄像头的角度旋转矢量和平移矢量,根据所述雷达和摄像头的角度旋转矢量和平移矢量,将标定目标在雷达和摄像头的空间坐标转化为世界坐标,实现雷达和摄像头的自动标定。
34、进一步的,所述世界坐标系下的雷达或摄像头的角度旋转矢量等于所述世界坐标系下的雷达或摄像头的角度旋转矢量初值与对应的偏差角度旋转矢量之和。
35、进一步的,所述世界坐标系下的雷达或摄像头的平移矢量等于所述世界坐标系下的雷达或摄像头的平移矢量初值与对应的偏差平移矢量之和。
36、进一步的,将标定目标在雷达和摄像头的空间坐标转化为世界坐标,其中,标定目标的世界坐标等于雷达的旋转矩阵与标定目标的雷达坐标的乘积与世界坐标系下的雷达平移矢量的和,所述雷达的旋转矩阵等于雷达的旋转算子与雷达的角度旋转矢量的乘积;或标定目标的世界坐标等于摄像头的旋转矩阵与标定目标的摄像头坐标的乘积与世界坐标系下的摄像头平移矢量的和;
37、所述摄像头的旋转矩阵等于摄像头的旋转算子与摄像头的平移矢量的乘积。
38、所述步骤s3,还包括:
39、将标定目标在雷达和摄像头的空间坐标转化的两个世界坐标进行比对,若两个世界坐标的误差值在预设误差范围内,则雷达和摄像头的自动标定完成,反之返回步骤s1,重复迭代直至所述误差值在预设误差范围内。
40、第二方面,本技术还提供一种自动标定系统,所述系统包括:
41、信息采集单元,用于采集世界坐标系下的多个雷达和摄像头的角度旋转矢量初值和平移矢量初值;
42、第一计算单元,用于通过遗传算法获取最小代价函数确定雷达和摄像头的偏差角度旋转矢量和偏差平移矢量;
43、第二计算单元,用于根据所述世界坐标系下的雷达和摄像头的角度旋转矢量初值和平移矢量初值,以及对应的偏差角度旋转矢量和偏差平移矢量,将标定目标在雷达和摄像头的空间坐标转化为世界坐标;
44、判断单元,判断标定目标由雷达和摄像头的空间坐标转化的两个世界坐标的误差值是否在预设误差范围内,若所述误差值在预设误差范围内,则雷达和摄像头的自动标定完成,反之返回步骤s1,重复迭代直至所述误差值在预设误差范围内。
45、第三方面,本技术还提供一种计算机可读存储介质,其上存储有计算机程序,包括:
46、所述计算机程序被处理器执行时实现如上任一所述的一种自动标定方法。
47、综上所述,本技术提出一种自动标定方法、系统及计算机可读存储介质,所述方法包括:获取世界坐标系下的雷达和摄像头的角度旋转矢量初值和平移矢量初值,通过遗传算法获取最小代价函数确定雷达和摄像头的偏差角度旋转矢量和偏差平移矢量,根据所述世界坐标系下的雷达和摄像头的角度旋转矢量初值和平移矢量初值,以及对应的偏差角度旋转矢量和偏差平移矢量,确定世界坐标系下的雷达和摄像头的角度旋转矢量和平移矢量,根据所述雷达和摄像头的角度旋转矢量和平移矢量,将标定目标在雷达和摄像头的空间坐标转化为世界坐标,实现雷达和摄像头的自动标定。
48、相比于现有技术,本技术具备以下技术效果:
49、本技术通过遗传算法实现了多个相同传感器或不同传感器间的自动标定,获得更全面和丰富的环境信息,增强对目标或环境的理解和认知能力,提高了各传感器间标定的效率,为感知系统的可靠性和准确性以及减少事故发生提供了前提条件,降低了传感器之间的对标误差,提高系统整体性能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/156019.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。