一种断股修复无人机自主返航路径规划方法及系统与流程
- 国知局
- 2024-07-30 11:15:35
本发明涉及无人机规划,尤其涉及一种断股修复无人机自主返航路径规划方法及系统。
背景技术:
1、多旋翼无人机具备广泛的应用前景,尤其适用于如输电线路巡检、事故现场搜救和环境侦察等缺乏有效先验信息的高风险应用场景,在这些环境中,人工作业流程往往繁琐且耗时,同时经常面临突如其来的危险,不仅给信息采集带来了障碍,更对工作人员的生命安全构成了潜在威胁,多旋翼无人机以出色的三维空间运动能力,突破了复杂环境对工作的限制,展现出巨大的应用潜力。在无人机输电线路的相关课题中,除了自主飞行上下线、线路挂载爬行、目标作业等研究内容之外,无人机的自主返航也是一大研究重点,无人机在手动返航途中会遇到诸多障碍,如户外环境视野限制、无可避免的认为操作失误等,这些因素增加了无人机返程危险性,作为自主返航过程中必不可少的一环,路径规划算法的优劣在很大程度上影响着无人机返程的安全和效率。
2、粒子群算法是受鸟群觅食行为启发而提出的一种基于群体智能的随机优化方法,尽管粒子群算法具有易实现和并行性强等优势,但也存在着潜在的问题,包括收敛速度较慢以及易陷入局部最优解等。在应对这些问题的研究中,一些学者在参数优化的层面提出了一种惯性权重线性递减的规则,试图在探索和开发之间达到平衡,然而,这种方法在解决易陷入局部最优解的问题上并不十分有效。另一方面,有研究团队尝试将遗传算法、狼群算法与粒子群算法融合,以期提高算法的性能,但普遍存在参数调整繁琐和算法耦合的问题。此外,多数算法的决策过程主要采用贪心决策,这种方式忽视了飞行器的动力学特性,导致全局效率的下降以及潜在风险的急剧增加。因此有必要着眼于提出新的优化策略,并全面地考虑无人机的动力学特性,以提高算法的全局效率和降低风险。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。因此,本发明提供了一种断股修复无人机自主返航路径规划方法解决断股修复无人机自主返航的路径规划的收敛速度较慢、易陷入局部最优解以及参数调整繁琐和算法耦合等问题。
3、为解决上述技术问题,本发明提供如下技术方案:
4、第一方面,本发明提供了一种断股修复无人机自主返航路径规划方法,包括:
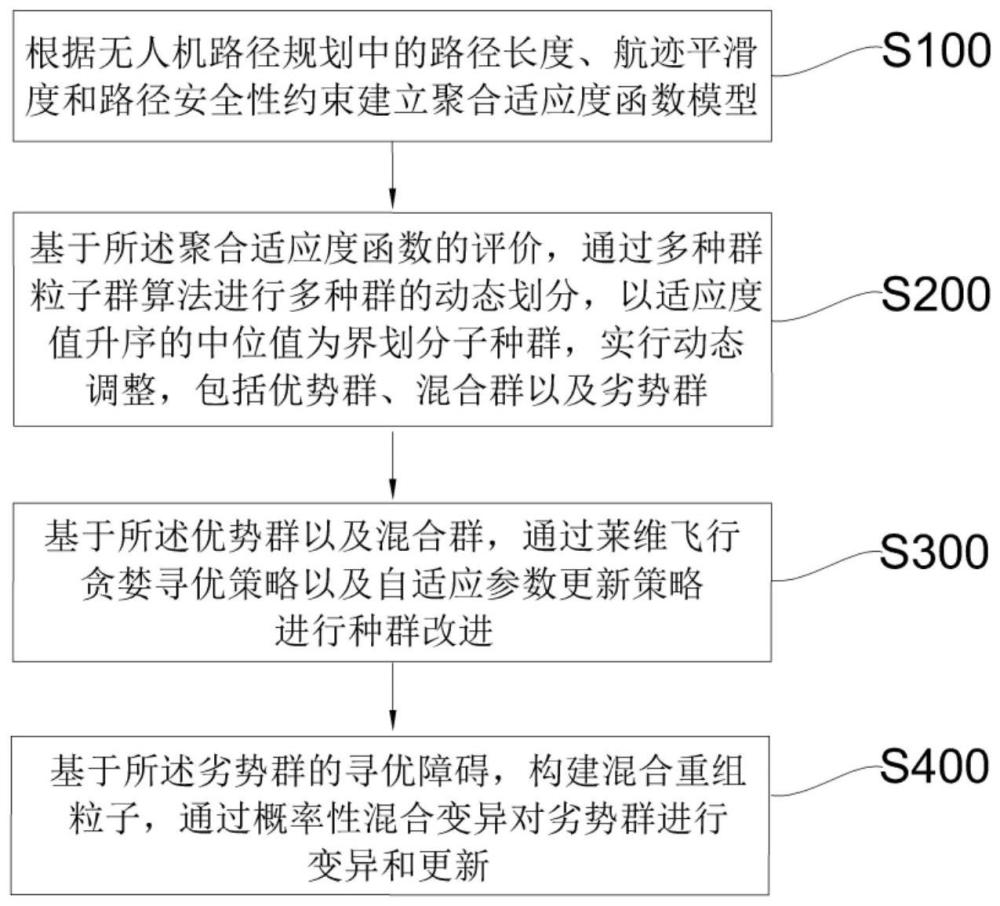
5、根据无人机路径规划中的路径长度、航迹平滑度和路径安全性约束,建立聚合适应度函数模型;
6、基于所述聚合适应度函数的评价,通过多种群粒子群算法进行多种群的动态划分,以适应度值升序的中位值为界划分子种群,实行动态调整,包括优势群、混合群以及劣势群;
7、基于所述优势群以及混合群,通过莱维飞行贪婪寻优策略以及自适应参数更新策略进行种群改进;
8、基于所述劣势群的寻优障碍,构建混合重组粒子,通过概率性混合变异对劣势群进行变异和更新。
9、作为本发明所述的断股修复无人机自主返航路径规划方法的一种优选方案,其中:建立所述聚合适应度函数模型包括,
10、规划无人机飞行路径长度,计算路径xi的长度代价函数,表示为:
11、
12、其中,pij=(xij,yij,zij)表示路径节点坐标,表示两个相邻路径点之间的距离,根据所有航段求和得到总的路径长度值;
13、轨迹平滑度的评估通过偏航角和爬升角进行计算,分别表示和在oxy平面上的投影,形成的夹角为偏航角ψij,令为z轴的单位矢量,投影矢量表示为:
14、
15、偏航角的计算公式表示为:
16、
17、爬升角为无人机的上升轨迹与水平线之间的夹角,以及在水平面上的投影形成的夹角为爬升角γij,表示为:
18、
19、航迹平滑度的评价函数表示为:
20、
21、令k为所有障碍物的集合,设障碍投影的中心为ck,半径为rk,无人机的半径为r,碰撞区域的半径为rc,无人机与投影中心的之间的距离为dk,给定一个航段为无人机的半径r和危险区域到碰撞区域的危险距离s,则路径安全性约束,航段的威胁代价函数表示为:
22、
23、作为本发明所述的断股修复无人机自主返航路径规划方法的一种优选方案,其中:基于所述路径长度代价函数、航迹平滑度的评价函数以及航段的威胁代价函数进行加权,得到总体代价函数,聚合适应度函数模型表示为:
24、
25、其中,λk表示权重系数,且λ1+λ2+λ3=1。
26、作为本发明所述的断股修复无人机自主返航路径规划方法的一种优选方案,其中:所述多种群动态划分包括,
27、适应度值小的为优势粒子,适应度值大的为劣势粒子;
28、从所述优势粒子和劣势粒子中分别抽取同等数量的粒子,组成局部粒子群算法模型,划分为优势群、混合群以及劣势群,分别为离最优解近的亲邻域、局部粒子群算法模型的重组域以及疏离域;
29、所述亲邻域中的粒子适应度值小,继承种群中最优解的位置信息,缩小步长进行搜索;
30、所述疏离域中的粒子向全局极值靠近,并探索周围新的优解;
31、所述重组域可以动态调整种群的多样性,吸取个体经验,且共享全局信息。
32、作为本发明所述的断股修复无人机自主返航路径规划方法的一种优选方案,其中:所述优势群的改进包括,
33、所述优势群通过莱维飞行贪婪寻优策略进行搜索更新的改进,莱维飞行的步长分布表示为:
34、levy(λ)~μ=k-λ,1<λ≤3
35、莱维飞行的随机搜索路径用mantegna算法模拟表示为:
36、
37、其中,β表示常数,取值为1<β<3,μ和υ表示区间[0,1]上的两个正态分布随机数,表示为:
38、
39、方差σμ和σv表示为:
40、
41、基于莱维飞行的位置更新式表示为:
42、
43、其中,和xg(k)分别表示第k次迭代时,经莱维飞行更新后的全局最优粒子位置和种群全局最优粒子位置,α表示步长控制因子,γ表示伽马函数;
44、基于莱维飞行的粒子位置,通过贪婪算法决定更新最优粒子位置,表示为:
45、
46、当更新后的位置优于原位置时,进行位置更新,否则保留原位置。
47、作为本发明所述的断股修复无人机自主返航路径规划方法的一种优选方案,其中:所述混合群的改进包括,
48、所述混合群通过余弦函数进行改进,进行全局开发和局部搜索;
49、惯性权重随着迭代次数的增加,使粒子的搜索步长相应减小,第k次迭代时的惯性权重表示为:
50、
51、其中,wmin、wmax分别表示惯性权重的最小值和最大值,kmax为总迭代次数;
52、基于所述余弦函数和惯性权重,加入自适应异步学习因子,表示为:
53、
54、
55、
56、其中,c1(k)表示个体学习因子,c2(k)表示种群学习因子,cmin、cmax表示固定参数,分别表示学习因子的最小值和最大值,表示在第k+1次迭代时第i个粒子在d维的速度,表示第i个粒子在d维搜索的最优位置,表示第k次迭代在d维群体搜索到的最优位置,表示在第k次迭代时第i个粒子在d维的位置,r1、r2表示随机数。
57、作为本发明所述的断股修复无人机自主返航路径规划方法的一种优选方案,其中:所述劣势群的改进包括,
58、构建混合粒子,表示第k次迭代的混合粒子,每一维度随机选自每个粒子当前历史最优位置所对应的某一维,且不重复选取同一个粒子的多个维度;
59、对每个粒子进行概率性变异,当个体变异判断式成立时,对粒子进行变异操作,否则按自适应参数的方式更新,概率性变异表示为:
60、
61、gv(x)=x×(1+n(0,1))
62、其中,r和n(0,1)是[0,1]之间的随机数,x为原始参数值,gv(x)为变异后的值;
63、基于所述概率性变异,改进的速度更新公式表示为:
64、
65、其中,c3为混合学习因子,r3为(0,1)间随机数。
66、第二方面,本发明提供了一种断股修复无人机自主返航路径规划系统,包括,
67、函数构建模块,用于根据无人机路径规划中的路径长度、航迹平滑度和路径安全性约束,建立聚合适应度函数模型;
68、划分模块,用于基于所述聚合适应度函数的评价,通过多种群粒子群算法进行多种群的动态划分,以适应度值升序的中位值为界划分子种群,实行动态调整,包括优势群、混合群以及劣势群;
69、第一改进模块,用于基于所述优势群以及混合群,通过莱维飞行贪婪寻优策略以及自适应参数更新策略进行种群改进;
70、第二改进模块,用于基于所述劣势群的寻优障碍,构建混合重组粒子,通过概率性混合变异对劣势群进行变异和更新。
71、第三方面,本发明提供了一种电子设备,包括:
72、存储器和处理器;
73、所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,该计算机可执行指令被处理器执行时实现所述断股修复无人机自主返航路径规划方法的步骤。
74、第四方面,本发明提供了一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现所述断股修复无人机自主返航路径规划方法的步骤。
75、与现有技术相比,本发明的有益效果:本发明提出了与无人机的路径规划密切相关的最优性、安全性和可行性约束并建立数学模型,为实现更为真实和合理的优化路径提供可靠的支持;针对传统粒子群算法存在的全局勘探能力不足问题,提出了动态划分多种群,在不限制自由的基础上丰富了粒子信息的更新方式,提高了算法对不同问题的适应性,解决了算法收敛速度慢的问题;针对传统粒子群算法易陷入局部最优无法跳出的短板,提出了一种自定义子种群的方法,针对各子种群的特点引入不同的并行更新策略,有效增强了优化算法的局部开采能力。
本文地址:https://www.jishuxx.com/zhuanli/20240730/156030.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表