柔性触觉传感器及具有柔性触觉传感器的机械手的制作方法
- 国知局
- 2024-07-30 11:40:37
本申请属于机器人,更具体地说,涉及柔性触觉传感器及具有柔性触觉传感器的机械手。
背景技术:
1、触觉是接触、冲击、压迫等机械刺激感觉的综合。触觉传感器是一种测量自身敏感面与外界物体相互作用参数(触觉、压觉、力觉、滑觉等)的装置,敏感面包含很多触觉敏感元。
2、触觉传感器作为可以模仿人体力学触觉感知功能的人造电子器件,随着智能机器人技术的发展,触觉传感器已受到越来越多的关注。
3、在智能机器人领域,通常需要确认执行末端如机械手是否已与物体接触以及进行力的感知和检测。例如,在机器人的执行末端如机械手对物体进行准确拾取时,通过触觉传感器进行力学的感测特别重要。
4、因此,本领域技术人员需要提供一种面向机器人的机械手的柔性触觉传感器,并实现可规模化生产制造。
技术实现思路
1、为了解决上述现有技术的技术问题,本申请实施例的提供了一种柔性触觉传感器及具有柔性触觉传感器的机械手。
2、为实现上述目的,本申请采用的技术方案是:提供了一种柔性触觉传感器,包括柔性触觉接触层、柔性传感模块、传感器支架;所述柔性传感模块安装在所述传感器支架上;所述柔性传感模块包括柔性绝缘基底和形成在所述柔性绝缘基底上的柔性传感单元,所述柔性传感单元包括电极层和压敏层;所述柔性触觉接触层位于所述柔性传感模块上。
3、根据本申请所提供的一种实施例,所述柔性触觉传感器还包括弹性衬底,所述弹性衬底位于所述柔性传感模块的柔性传感单元的下方。
4、根据本申请所提供的一种实施例,所述弹性衬底的硬度大于所述柔性触觉接触层的硬度;所述弹性衬底的底部直接或间接抵靠在所述传感器支架上;所述传感器支架上设置有与所述弹性衬底相适配的安装部。
5、根据本申请所提供的一种实施例,所述柔性触觉传感器还包括设置在所述柔性绝缘基底上的至少两个加强板,所述加强板位于柔性传感单元的两侧,所述柔性触觉传感器通过加强板安装在所述传感器支架上。
6、根据本申请所提供的一种实施例,所述柔性传感模块还包括形成在所述柔性绝缘基底上的fpc走线部,所述fpc走线部的一端与所述电极层电连接;
7、所述fpc走线部的另一端与外部电路连接;或者,所述柔性触觉传感器还包括转接线路板,所述fpc走线部的另一端与所述转接线路板连接。
8、根据本申请所提供的一种实施例,所述柔性传感单元的所述第一电极和所述第二电极均位于所述压敏层的同一侧,呈阵列排布的多个所述柔性传感单元凸出形成在所述柔性绝缘基底上;所述柔性传感模块还包括封装层。
9、根据本申请所提供的一种实施例,所述柔性触觉接触层和所述柔性传感模块结合为一体结构。
10、根据本申请所提供的一种实施例,所述柔性触觉接触层是通过成型工艺在所述柔性传感模块上形成的包胶层,所述柔性触觉接触层的外表面上具有摩擦纹理。
11、本申请还提供了一种具有柔性触觉传感器的机械手,包括掌部单元和至少一个手指单元,所述机械手包括如上所述的柔性触觉传感器。
12、根据本申请所提供的一种实施例,所述手指单元包括指节主体,所述传感器支架为所述指节主体上的至少一部分;或者,所述传感器支架安装在所述指节主体上。
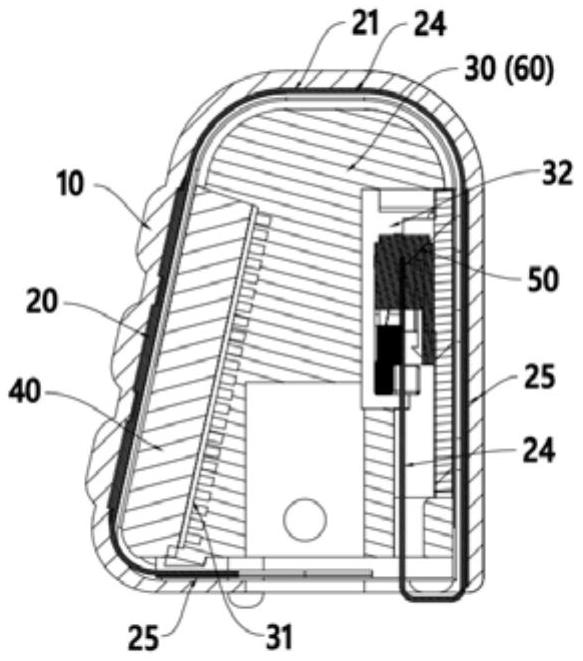
13、根据本申请所提供的一种实施例,所述手指单元包括手指指节,所述传感器支架为所述手指指节的指节主体上的至少一部分;所述手指指节的指节主体的手心侧设置有第一凹槽,所述弹性衬底位于所述第一凹槽内;所述柔性触觉传感器还包括转接线路板,所述柔性传感单元通过所述fpc走线部与所述转接线路板电连接;所述手指指节的指节主体的手背侧设置有第二凹槽,所述转接线路板位于第二凹槽内。
14、本申请的有益效果包括:
15、(1)本申请的柔性触觉传感器具有适应性强、灵敏度高的优势,尤其适用于机械手上,可检测和感知机械手与物体接触的情况;
16、(2)在所述柔性传感模块上具有柔性触觉接触层,所述柔性传感模块作为可装配结构件安装在所述传感器支架上;
17、(3)在所述柔性传感模块的柔性传感单元下方设置有弹性衬底,所述弹性衬底用于为所述柔性触觉传感器提供弹性力;当所述柔性触觉接触层和柔性传感模块受外力后形变大,可以通过调整弹性衬底的材料或硬度实现消除所述柔性触觉接触层和柔性传感模块的应力;或者,在对所述柔性触觉传感器灵敏度要求高的情况下,可以通过调整弹性衬底的材料或硬度提高传感器的灵敏度。
18、(4)优选的,呈阵列排布的多个所述柔性传感单元凸出形成在所述柔性绝缘基底上,所述柔性传感单元呈立体结构。所述柔性传感单元的立体结构有利于制备出表面具有弧面、曲面造型的柔性触觉传感器;
19、(5)通过在柔性传感单元两侧的所述柔性绝缘基底上设置所述加强板,可便捷地将所述柔性触觉传感器作为可装配结构件安装在所述传感器支架上;
20、(6)所述柔性触觉接触层和所述柔性传感模块优选为一体结构,有利于提升传感灵敏度;而且有利于大规模制备。
技术特征:1.一种柔性触觉传感器,其特征在于,包括柔性触觉接触层、柔性传感模块、传感器支架;所述柔性传感模块安装在所述传感器支架上;所述柔性传感模块包括柔性绝缘基底和形成在所述柔性绝缘基底上的柔性传感单元,所述柔性传感单元包括电极层和压敏层;所述柔性触觉接触层位于所述柔性传感模块上。
2.根据权利要求1所述的柔性触觉传感器,其特征在于,所述柔性触觉传感器还包括弹性衬底,所述弹性衬底位于所述柔性传感模块的柔性传感单元的下方。
3.根据权利要求2所述的柔性触觉传感器,其特征在于,所述弹性衬底的硬度大于所述柔性触觉接触层的硬度;所述弹性衬底的底部直接或间接抵靠在所述传感器支架上;所述传感器支架上设置有与所述弹性衬底相适配的安装部。
4.根据权利要求1所述的柔性触觉传感器,其特征在于,所述柔性触觉传感器还包括设置在所述柔性绝缘基底上的至少两个加强板,所述加强板位于柔性传感单元的两侧,所述柔性触觉传感器通过加强板安装在所述传感器支架上。
5.根据权利要求1所述的柔性触觉传感器,其特征在于,所述柔性传感模块还包括形成在所述柔性绝缘基底上的fpc走线部,所述fpc走线部的一端与所述电极层电连接;
6.根据权利要求1所述的柔性触觉传感器,其特征在于,所述柔性传感单元的第一电极和第二电极均位于所述压敏层的同一侧,呈阵列排布的多个所述柔性传感单元凸出形成在所述柔性绝缘基底上;所述柔性传感模块还包括封装层。
7.根据权利要求1所述的柔性触觉传感器,其特征在于,所述柔性触觉接触层和所述柔性传感模块结合为一体结构。
8.根据权利要求7所述的柔性触觉传感器,其特征在于,所述柔性触觉接触层是通过成型工艺在所述柔性传感模块上形成的包胶层,所述柔性触觉接触层的外表面上具有摩擦纹理。
9.一种具有柔性触觉传感器的机械手,包括掌部单元和至少一个手指单元,其特征在于,所述机械手包括如权利要求1-8任一项所述的柔性触觉传感器。
10.根据权利要求9所述的机械手,其特征在于,所述手指单元包括手指指节,所述传感器支架为所述手指指节的指节主体上的至少一部分;所述手指指节的指节主体的手心侧设置有第一凹槽,所述弹性衬底位于所述第一凹槽内;所述柔性触觉传感器还包括转接线路板,所述柔性传感单元通过所述fpc走线部与所述转接线路板电连接;所述手指指节的指节主体的手背侧设置有第二凹槽,所述转接线路板位于第二凹槽内。
技术总结本申请公开了一种柔性触觉传感器,包括柔性触觉接触层、柔性传感模块、传感器支架;所述柔性传感模块安装在所述传感器支架上;所述柔性传感模块包括柔性绝缘基底和形成在所述柔性绝缘基底上的柔性传感单元,所述柔性传感单元包括电极层和压敏层;所述柔性触觉接触层位于所述柔性传感模块上。本申请还公开了具有上述柔性触觉传感器的机械手。本申请的柔性触觉传感器,具有适应性强、灵敏度高的优势,尤其适用于机械手上,可检测和感知机械手与物体接触的情况。技术研发人员:肖勐平,李文强,刘寅,任化龙受保护的技术使用者:深圳忆海原识科技有限公司技术研发日:20231124技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/157461.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表