一种气体充装的自动化系统及方法与流程
- 国知局
- 2024-07-30 12:11:31
本发明涉及气体充装,具体涉及一种气体充装的自动化系统及方法。
背景技术:
1、目前在气体充装领域,由于在气体充装过程中,瓶把手与瓶口需要错位,充气瓶与充气口需要对准连接,在现有的气体充装系统中,通常是通过人工搬运气体充装瓶,人工调整气体充装瓶的位置,人工对充装接头进行连接,人工控制充装瓶开关阀的打开与关闭;但是人工操作不仅充装效率低下,存在一定的误操作可能性,而且由于气体充装的特殊性,在气体充装环境中,可能存在一些有毒有害气体、易燃易爆炸气体,还存在一定的人身安全风险。
2、基于上述背景,发明人设计出了一种气体充装的自动化系统及方法,解决目前气体充装的自动化问题,由此,特提出本技术。
技术实现思路
1、本技术的目的是提供一种气体充装的自动化系统及方法,用于解决目前在气体充装领域中需要依靠人工充气,工作效率低、存在人身安全风险的问题。
2、为解决上述技术问题,本发明采用了以下方案:
3、本技术的一方面提供一种气体充装的自动化系统,包括具有找正工位并用于找正罐体上的把手和充气嘴位置的找正模块,以及具有充装工位并用于夹紧罐体并向罐体内部充气的充装模块;
4、还包括用于抓取罐体并将其依次转运到找正工位和充装工位的转运模块。
5、本技术的设计构思如下:
6、由于罐体的充气嘴与罐体通常固定连接,而把手与罐体之间可进行相对旋转,因而,直接利用转运模块将罐体转运到充装模块的充装工位中,会出现充气嘴位置不确定,把手位置不确定,把手与充气嘴的相对位置不确定,以及由此导致的把手位置遮挡充气嘴位置,充气结构难以对准充气嘴导致无法充气的各种问题,而本技术通过设置具有找正工位的找正模块和具有充装工位的充装模块,以及将罐体先后转运到找正工位和充装工位的转运模块,可以实现罐体的把手与充气嘴先找正,可为罐体在充装工位的自动化充气提供前提条件,随后再利用转运模块将找正把手和充气嘴位置后的罐体转运到充装模块的充装工位后,由于充气嘴、把手位置经过找正确定,可以在充装工位使得充气结构精确对准连通充气嘴,实现气体无干预自动化充装的设计构思,解决目前在气体充装领域中需要依靠人工充气,工作效率低、存在人身安全风险的问题。
7、在本技术设计构思的路径下,一些优选的方案如下所述:
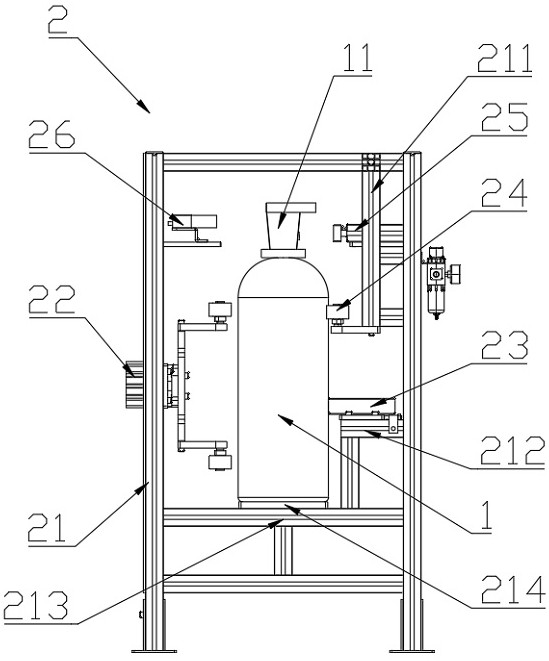
8、优选的,所述找正模块包括具有找正工位的找正架体,以及设置于找正架体上并位于找正工位两侧的把手卡位结构和气嘴校验结构;
9、还包括用于夹紧定位罐体的夹紧机构和用于驱动罐体沿其轴线自转的找正驱动机构,夹紧机构和找正驱动机构均位于把手卡位结构和气嘴校验结构的下方。
10、优选的,所述夹紧机构包括固定于找正架体上并位于找正工位两侧的限位结构和推罐结构;
11、限位结构朝向找正工位的一侧设置有至少两个并列设置的限位滚轮;
12、推罐结构朝向找正工位的一侧设置有至少两个并列设置的推罐滚轮;
13、限位滚轮和推罐滚轮的轴线均平行于罐体的轴线竖向设置;
14、找正工位位于两个限位滚轮和两个推罐滚轮之间。
15、优选的,所述推罐结构还包括固定于找正架体上的推罐驱动和设置于推罐驱动输出端上的c形架,所述c形架的两端均具有用于安装两个滚轮的分叉,推罐滚轮设置在c形架的分叉上。
16、优选的,所述找正架体上设置有用于安装限位结构和把手卡位结构的上支架;
17、限位结构还包括至少两块并列的设置于上支架底部的滚轮安装板,限位滚轮安装于滚轮安装板朝向找正工位的一端。
18、优选的,所述把手卡位结构包括固定于找正架体上的卡块驱动和用于伸入把手的卡槽内限制其随罐体转动的把手卡块,把手卡块设置于卡块驱动的输出端上;
19、所述卡块驱动为直线型驱动结构。
20、优选的,所述找正架体上设置有用于安装找正驱动机构的下支架;
21、所述找正驱动机构包括设置于下支架上的轮盘安装板,以及用于驱动罐体沿其轴线自转的驱动轮盘,驱动轮盘安装在轮盘安装板上。
22、优选的,所述充装模块包括具有充装工位的充装架体,以及位于设置于充装架体上并位于充装工位两侧的气嘴限位结构和充气结构;
23、还包括用于将罐体压紧在充装工位上的压紧机构,以及用于旋拧开关阀的旋拧结构,压紧机构位于气嘴限位结构和充气结构的下方,旋拧结构的输出端位于充装工位的正上方。
24、优选的,所述气嘴校验结构包括图像采集端朝向找正工位设置的第一图像采集器;
25、所述转运模块包括机械手和固定于机械手上的第二图像采集器;
26、还包括与第一图像采集器和第二图像采集器的信号输出端连通的控制模块;
27、控制模块包括用于根据第一图像采集器采集的气嘴采集图像与内置气嘴标准图像进行比对判断处理的第一控制单元;
28、以及用于根据第二图像采集器采集的罐顶采集图像与内置罐顶标准图像进行比对判断处理的第二控制单元;
29、第一控制单元与找正驱动机构的信号输入端连通,第二控制单元与机械手的信号输入端连通。
30、本技术的另一方面提供一种气体充装的自动化方法,适应于以上任一所述的一种气体充装的自动化系统,包括以下步骤:
31、s1、把手与气嘴找正;控制模块控制推罐结构推动罐体朝向限位结构移动,直至罐体被夹紧在推罐结构和限位结构之间;
32、同时启动找正驱动机构驱动罐体沿其轴线自转;
33、启动把手卡位结构的卡块驱动,驱动把手卡块伸入把手的卡槽内限制其随罐体转动;
34、控制模块的第一控制单元根据第一图像采集器实时采集的气嘴采集图像与内置气嘴标准图像对比判断是否相似;
35、若否,则判断位置不正,找正驱动机构继续驱动罐体自转;
36、若是,则判定位置到位,找正驱动机构关闭,把手与气嘴找正步骤完成;
37、s2、气罐转运:转运模块抓取罐体并将其从找正工位转运至充装工位释放,
38、在转运模块将罐体释放到充装工位之前,控制模块的第二控制单元根据第二图像采集器采集到的当前罐顶部图像与内置标准罐定图像判断是否需要高度补偿,确保充气嘴与充气结构的高度相同;
39、若否,则判断充气嘴与充气结构的高度相同,在罐体被压紧模块压紧后转运模块直接释放罐体;
40、若是,则第二控制单元根据判断处理结果向转运模块发送补偿高度信号,确保罐体在释放前的充气嘴与充气结构高度相同;
41、转运模块在罐体被压紧模块压紧后释放;
42、s3、气罐充气:转运模块将罐体转运到充装工位后,充装工位的压紧模块将罐体压紧在充装工位,确保充气嘴与充气结构的轴线重合;
43、启动气嘴限位结构和充气结构,使充气结构对准连通罐体的充气嘴;
44、随后旋拧机构往下移动下压开关阀并进行旋拧,开始气体充装。
45、本发明的有益效果:
46、本技术可以通过找正模块、充装模块和转运模块,可以实现罐体充气的全自动化,无需人工干预整个充装流程,充装效率高,且可以避免充装一些特殊气体例如有毒有害气体、易燃易爆气体时导致的人身安全风险。
本文地址:https://www.jishuxx.com/zhuanli/20240730/159109.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表