路沿检测方法、装置、车辆及计算机可读存储介质与流程
- 国知局
- 2024-07-31 22:37:40
本申请涉及汽车,尤其涉及一种路沿检测方法、装置、车辆及计算机可读存储介质。
背景技术:
1、在自动驾驶车辆中,需要传感器对车辆周围的环境进行感知以获得感知信息来对车辆进行控制,例如控制车辆行驶、避障、停泊等。
2、目前,在车辆进行停泊时,可使用超声波对潜在的车位进行检测,然后规划路径,准确的停入到相应的位置,但是,对潜在的车位进行检测时只能得出车位的长度和估计出的宽度,而无法感知泊车位置的路沿,所以跟踪规划的路径行驶时有撞到路沿的危险。
技术实现思路
1、本申请的主要目的在于提供一种路沿检测方法、装置、车辆及计算机可读存储介质,旨在解决相关技术中路沿识别的准确性低的技术问题。
2、为实现上述目的,本申请提供一种路沿检测方法,所述路沿检测方法包括以下步骤:
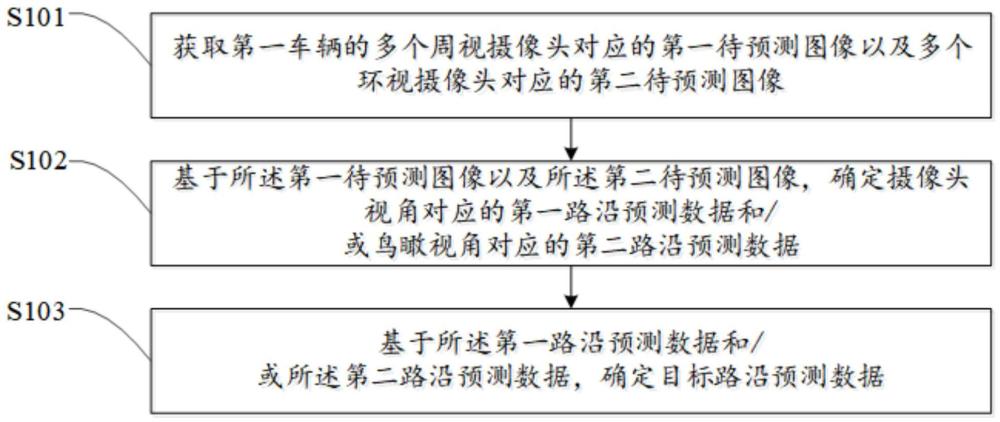
3、获取第一车辆的多个周视摄像头对应的第一待预测图像以及多个环视摄像头对应的第二待预测图像;
4、基于所述第一待预测图像以及所述第二待预测图像,确定摄像头视角对应的第一路沿预测数据和/或鸟瞰视角对应的第二路沿预测数据;
5、基于所述第一路沿预测数据和/或所述第二路沿预测数据,确定目标路沿预测数据。
6、进一步地,所述基于所述第一待预测图像以及所述第二待预测图像,确定摄像头视角对应的第一路沿预测数据,包括:
7、将所述第一待预测图像以及所述第二待预测图像输入摄像头视角的神经网络模型进行模型预测,获得第一路沿预测数据,其中,所述第一路沿预测数据包括第一路沿位置数据、第一路沿高度数据以及第一占据栅格。
8、进一步地,所述将所述第一待预测图像以及所述第二待预测图像输入摄像头视角的神经网络模型进行模型预测,获得第一路沿预测数据的步骤之前,还包括:
9、获取第二车辆的多个周视摄像头对应的第一周视图像以及多个环视摄像头对应的第一环视图像;
10、分别对所述第一周视图像以及所述第一环视图像进行标注操作,获得第一路沿标注信息;
11、将所述第一路沿标注信息、所述第一周视图像以及所述第一环视图像,输入摄像头视角的待训练神经网络模型进行模型训练,获得所述神经网络模型。
12、进一步地,所述获基于所述第一待预测图像以及所述第二待预测图像确定鸟瞰视角对应的第二路沿预测数据,包括:
13、将所述第一待预测图像以及所述第二待预测图像输入鸟瞰视角的bev网络模型进行模型预测,获得所述第二路沿预测数据,其中,所述第二路沿预测数据包括第二路沿位置数据、第二路沿高度数据以及第二占据栅格。
14、进一步地,所述将所述第一待预测图像以及所述第二待预测图像输入鸟瞰视角的bev网络模型进行模型预测,获得所述第二路沿预测数据的步骤之前,还包括:
15、获取第二车辆的多个周视摄像头对应的第二周视图像以及多个环视摄像头对应的第二环视图像;
16、分别对所述第二周视图像以及所述第二环视图像进行标注操作,获得第二路沿标注信息;
17、将所述第二路沿标注信息、所述第二周视图像以及所述第二环视图像,输入鸟瞰视角的待训练鸟瞰网络模型进行模型训练,获得所述鸟瞰视角的bev网络模型。
18、进一步地,所述分别对所述第二周视图像以及所述第二环视图像进行标注操作,获得第二路沿标注信息的步骤包括:
19、获取所述第二车辆的激光雷达对应的第一点云数据;
20、获取所述第一点云数据对应的第三路沿标注信息;
21、基于所述第三路沿标注信息,确定所述第二路沿标注信息。
22、进一步地,所述获取所述点云数据对应的第三路沿标注信息的步骤包括:
23、对所述第一点云数据对应的三维空间进行格栅化处理,获得第一格栅数据;
24、基于所述第一点云数据,在所述第一格栅数据中确定所述第三路沿标注信息中的占据栅格;
25、基于预设网络模型对所述第一点云数据进行标注,获得所述第三路沿标注信息中的路沿位置数据以及路沿高度数据。
26、此外,为实现上述目的,本申请还提供一种车辆,所述车辆包括:
27、获取模块,用于获取车辆的多个周视摄像头对应的第一待预测图像以及多个环视摄像头对应的第二待预测图像;
28、预测模块,用于基于所述第一待预测图像以及所述第二待预测图像,确定摄像头视角对应的第一路沿预测数据和/或鸟瞰视角对应的第二路沿预测数据;
29、确定模块,用于基于所述第一路沿预测数据和/或所述第二路沿预测数据,确定目标路沿预测数据。
30、此外,为实现上述目的,本申请还提供一种路沿检测装置,所述路沿检测装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的路沿检测程序,所述路沿检测程序被所述处理器执行时实现前述的路沿检测方法的步骤。
31、此外,为实现上述目的,本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有路沿检测程序,所述路沿检测程序被处理器执行时实现前述的路沿检测方法的步骤。
32、本申请通过获取第一车辆的多个周视摄像头对应的第一待预测图像以及多个环视摄像头对应的第二待预测图像;接着基于所述第一待预测图像以及所述第二待预测图像,确定摄像头视角对应的第一路沿预测数据和/或鸟瞰视角对应的第二路沿预测数据;而后基于所述第一路沿预测数据和/或所述第二路沿预测数据,确定目标路沿预测数据,能够通过第一待预测图像以及第二待预测图像进行纯视觉的路沿预测,提高了路沿预测数据的准确性以及精度,与采用激光雷达进行路沿检测相比,降低了路沿检测的成本。
技术特征:1.一种路沿检测方法,其特征在于,所述路沿检测方法包括以下步骤:
2.如权利要求1所述的路沿检测方法,其特征在于,所述基于所述第一待预测图像以及所述第二待预测图像,确定摄像头视角对应的第一路沿预测数据,包括:
3.如权利要求2所述的路沿检测方法,其特征在于,所述将所述第一待预测图像以及所述第二待预测图像输入摄像头视角的神经网络模型进行模型预测,获得第一路沿预测数据的步骤之前,还包括:
4.如权利要求1至3任一项所述的路沿检测方法,其特征在于,所述基于所述第一待预测图像以及所述第二待预测图像,确定鸟瞰视角对应的第二路沿预测数据,包括:
5.如权利要求4所述的路沿检测方法,其特征在于,所述将所述第一待预测图像以及所述第二待预测图像输入鸟瞰视角的bev网络模型进行模型预测,获得所述第二路沿预测数据的步骤之前,还包括:
6.如权利要求5所述的路沿检测方法,其特征在于,所述分别对所述第二周视图像以及所述第二环视图像进行标注操作,获得第二路沿标注信息的步骤包括:
7.如权利要求6所述的路沿检测方法,其特征在于,所述获取所述点云数据对应的第三路沿标注信息的步骤包括:
8.一种车辆,其特征在于,所述车辆包括:
9.一种路沿检测装置,其特征在于,所述路沿检测装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的路沿检测程序,所述路沿检测程序被所述处理器执行时实现如权利要求1至7中任一项所述的路沿检测方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有路沿检测程序,所述路沿检测程序被处理器执行时实现如权利要求1至7中任一项所述的路沿检测方法的步骤。
技术总结本申请公开了一种路沿检测方法、装置、车辆及计算机可读存储介质,其方法包括:获取第一车辆的多个周视摄像头对应的第一待预测图像以及多个环视摄像头对应的第二待预测图像;基于所述第一待预测图像以及所述第二待预测图像,确定摄像头视角对应的第一路沿预测数据和/或鸟瞰视角对应的第二路沿预测数据;基于所述第一路沿预测数据和/或所述第二路沿预测数据,确定目标路沿预测数据。本申请能够通过第一待预测图像以及第二待预测图像进行纯视觉的路沿预测,提高了路沿预测数据的准确性以及精度,与采用激光雷达进行路沿检测相比,降低了路沿检测的成本。技术研发人员:冯谢星,杨轶林,董远强,蒋毅,周俊豪受保护的技术使用者:广州小鹏自动驾驶科技有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/193890.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。