一种港口滚装作业特种无人装备设计决策指导方法
- 国知局
- 2024-07-31 22:42:08
本发明涉及一种设计方案决策指导方法,更具体的说是涉及一种港口滚装作业特种无人装备设计决策指导方法。
背景技术:
1、大型综合港口是世界重要贸易口岸和海上交通运输枢纽。近年来,进出口业务迅猛发展,港口滚装业务作业压力激增。以汽车进出口为例,远洋汽车滚装船则是汽车出口的最主要的运输方式,汽车出口滚装化率(err)约为70%。港口的低碳智能转型发展需求与港口滚装业务作业大运量现状相结合,对港口滚装作业特种无人装备的设计研发提出了更高的要求。
2、对应差异化的港口地形及作业环境,港口滚装作业特种无人装备的设计属于满足特定港口用户需求的个性化定制设计,一般借助计算机辅助设计工具开展对装备功能结构设计方案的由概念到具体的规划设计,并通过设置线上装备设计方案评审里程碑节点或及时的线下装备设计评审会议纠正设计问题,保障装备设计方案的整体质量水平。然而,在装备设计方案形成演进过程中,过于频繁的线下评审节点会影响设计周期进度,而减少设计评审频次,又会加大设计返工的概率。在已经实现装备设计全流程在线数字化的现状条件下,实现在装备在线设计的方案演进过程中,通过挖掘与分析直接设计过程数据,及时感知预测当前设计质量,发现设计问题,指导设计决策,具有重要的研究意义和应用价值。然而,当前该领域的研究仍然相对缺乏,理论技术方法亟待突破。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种港口滚装作业特种无人装备设计决策指导方法,所提出的方法通过对装备在线设计过程的直接数据的采集处理、编码转录与追溯推理分析,量化感知预测当前设计质量,能够帮助及时发现设计问题,指导设计决策。
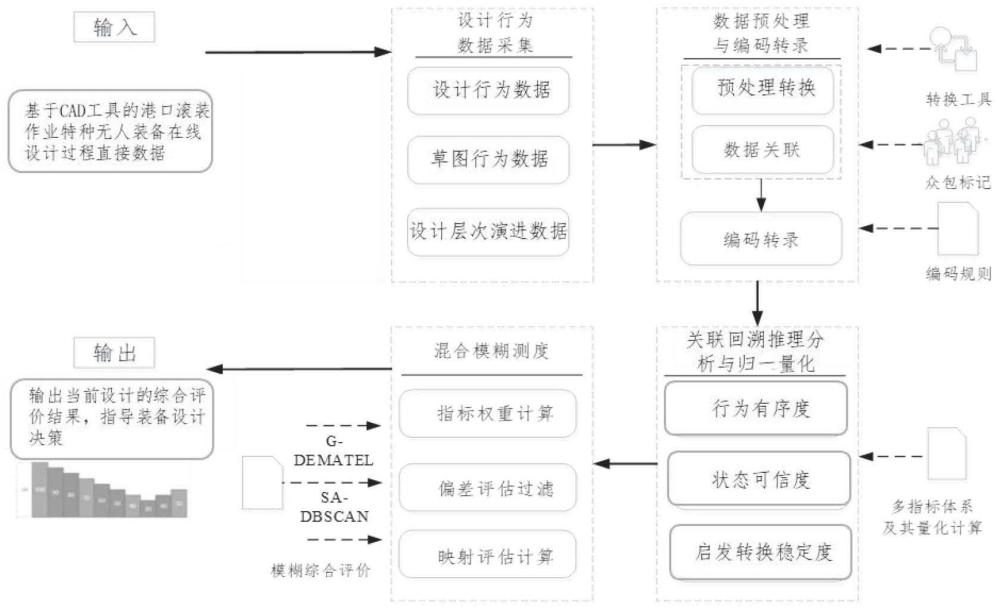
2、为实现上述目的,本发明提供的技术方案包括如下步骤:
3、步骤一,对基于计算机辅助设计工具开展的装备设计的直接过程数据进行采集,在对采集的数据进行预处理后,对数据进行设计行为元序列编码转录;
4、步骤二,建立设计行为推理指标体系和归一量化机制,之后利用设计好的推理指标体系和归一量化机制对步骤一转录得到的编码序列进行关联回溯推理与指标量化;
5、步骤三,对编码序列的推理与量化分析结果进行混合模糊多属性评价,之后输出综合评价结果,指导装备设计决策。
6、作为本发明的进一步改进,所述步骤一中进行设计行为元序列编码转录的具体步骤如下:
7、步骤一一,对设计行为进行编码转录,根据产品设计行为特征和数据采集环境定义基本的设计行为动作,将设计行为概括为物理、感知、功能和概念四个层次,在对应每个级别中进一步细分动作类型并与相应的装备设计草图建立关联;
8、步骤一二,对装备设计草图行为进行编码转录,基于三个维度跟踪草图行为的演化,具体为:草图变换、垂直变换关联变化和草图复杂性演化;
9、步骤一三,对设计问题层次进行编码转录。
10、作为本发明的进一步改进,所述步骤一一中对设计行为进行细分编码转录的具体方式如下:首先引入基本设计行为动作间的依赖和触发两种关系类型,之后将四个设计行为层次遵循从低到高的依赖关系,较高级别的行为操作可以触发较低级别或相同级别的操作,之后引入“新”、“连续”和“再访”三个标识,对于一个设计行为片段中第一次做出的行为动作,编码为“新”;对于在某个设计片段上继续之前一个片段上的行为动作,编码为“连续”;对于返回一个不连续的前序设计片段中所做的行为动作,编码为“再访”。
11、作为本发明的进一步改进,所述步骤一二中对设计草图行为进行编码转录的具体方式为:将设计草图复杂度分为五个级别,当发生设计草图变换时立即评估上一个设计草图的复杂度,将设计草图i的复杂度记为1≤n≤5为复杂度等级。
12、作为本发明的进一步改进,所述步骤二中设计行为回溯推理指标体系和归一量化机制的具体步骤如下:
13、步骤二一,基于对设计行为元序列中基础行为元间演化关联的回溯分析,通过推理评价设计行为间依赖有序程度ob、特定类型设计行为间正相关程度ok、不同设计阶段对物理动作和功能动作的偏好符合程度op、垂直转换关联类型间有序依赖程度oa、触发行为和垂直转换类型之间的有序依赖程度ot和设计阶段有序程度od,综合反映设计行为有序度od;
14、步骤二二,以对应设计行为规律知识为依托,通过推理评价行为fp/pf/ps和k的频率比cr、功能/结构探索行为和外部表征行为的优先级偏好cb、设计草图演化综合质量cq、设计草图关联类型偏好ca、设计问题求解阶段偏好cp,综合反映设计状态可信度cd;
15、步骤二三,通过分析设计阻滞频率st和设计的发散和收敛状态sd,综合反映设计启发转换稳定度sd。
16、作为本发明的进一步改进,所述步骤二一中的设计行为间依赖有序程度ob、特定类型设计行为间正相关程度ok、不同设计阶段对物理动作和功能动作的偏好符合程度op、垂直转换关联类型间有序依赖程度oa、触发行为和垂直转换类型之间的有序依赖程度ot和设计阶段有序程度od的量化评价指标如下述公式:
17、
18、
19、
20、
21、
22、
23、其中,nwdt是行为序列中依赖和触发关系项的总数;ned和net分别指错误依赖和错误触发关系的数量;neat是关联类型编码中触发关系项的总数;nea是错误触发关系数量;nect是触发关联产生的关键触发行为编码与关联类型编码之间的触发关系项的总数;nec是错误触发关系数量;取δ=0.001;nwht和nwpt分别是设计问题编码的层次关系项和设计问题解决过程编码的过程关系项的总数;neh和nep是它们之间错误关系的数量;cov(fsk,fspf)是协方差;σfsk是标准差;e(fsk)是均值;fsk和fspf为分别记录行为k的发生频率和感知及功能层级行为发生频率的向量;pdp和pd分别是问题分析和空间排布阶段行为d的偏好度,pfs和pff分别是空间排布和功能探索阶段功能层级行为的偏好度,pds、pff和pfs量化定义可参照pdp;ndp和nd分别是问题分析阶段和整个求解过程中行为d的数量;np和nwp分别是问题分析阶段和整个求解过程中所有行为的总数。
24、作为本发明的进一步改进,所述步骤二二中的行为fp/pf/ps和k的频率比cr、功能/结构探索行为和外部表征行为的优先级偏好cb、设计草图演化综合质量cq、设计草图关联类型偏好ca和设计问题求解阶段偏好cp的量化评价指标如下述公式:
25、
26、
27、
28、
29、
30、其中,nta是动作pf、ps和k的总数;nfp是动作fp的总数;取a=0.34和b=0.84;ncs是编码序列的编码总数;sdni是属于感知和功能层级的行为编码序列号;m是感知和功能层级的行为总数;snpfi是行为d的序列号;n是行为d的总数;l是设计求解过程中生成的草图总数;k是其中具有转换关联的草图数量;是草图i的复杂度等级。取δ=0.001;na是垂直转换中的关联项总数;nfb是其中的行为关联项和功能关联项的总数;npw是问题求解过程的编码总数;npq是确定设计问题和设计问题定义阶段(包括an、pd和ga)的编码总数;liti是第i阶段迭代中包含的编码总数;f是阶段迭代总数。
31、作为本发明的进一步改进,所述步骤二三中设计阻滞频率st和设计发散和收敛状态sd的量化评价指标如下述公式:
32、
33、
34、其中,ncs是编码序列中的编码总数;nti是满足设计中断条件的行为代码总数;nsl和nsv是设计求解阶段an、pd和ga中横向和垂直转换的数量;nel和nev是剩余设计求解阶段中横向和垂直转换的数量。
35、作为本发明的进一步改进,所述步骤三中对编码序列的推理与量化分析结果进行混合模糊多属性评价,之后输出综合评价结果的具体步骤如下:
36、步骤三一,基于g-dematel进行指标权重分析;
37、步骤三二,基于sa-dbscan进行多转录结果的偏差过滤;
38、步骤三三,基于混合模糊多属性评价的设计综合评价。
39、作为本发明的进一步改进,所述步骤三一中g-dematel的计算步骤如下:
40、步骤三一一,基于评估意见生成总体灰直接关系矩阵,解模糊获得直接关系矩阵dn×n;
41、步骤三一二,计算归一化的直接关系矩阵ndn×n:
42、
43、步骤三一三,计算总体关系矩阵tn×n,揭示每对指标之间的总体关系;
44、t=nd×(i-nd)-1
45、步骤三一四,通过计算矩阵t行列之和建立因果关系图,横轴向量(rk+ck)显示第k个指标的重要性,纵轴向量(rk-ck)表示该指标属于因果组还是效应组,当(rk-ck)的值为正时属于因果组,否则属于效应组;
46、
47、
48、步骤三一五,计算指标权重向量w:
49、
50、作为本发明的进一步改进,所述步骤三一一中生成总体灰直接关系矩阵的具体方式如下:
51、使用矩阵ai表示第i项灰直接关系矩阵,对于l个不同的灰直接关系矩阵,通过平均法计算出总体灰直接关系矩阵on×n,然后通过解模糊计算得到清晰的直接关系矩阵dn×n,区间数的解模糊值dij可通过下式计算:
52、
53、
54、
55、其中,s是评估状态的预警指标,当s=0、0.5和1时,评估状态分别对应最激进、最平均和最谨慎。
56、作为本发明的进一步改进,所述步骤三二中基于sa-dbscan进行偏差过滤的具体步骤如下:
57、步骤三二一,根据下述公式计算转录结果集x中每两点之间的距离,dij表示两个不同点xi和xj之间的距离,根据向量空间维数选择对应合适度量方法:
58、
59、步骤三二二,对于点xi,将该点到其他点的距离按升序排序,然后选择排序为k的距离作为xi的k距离;按升序排序所有采样点的k距离,令ε等于与下一个相邻点差异最大的点的k距离;计算每个点ε域中其他点的数量pi,并根据下面公式设置η:
60、
61、步骤三二三,令u=0且vi=0,i=1,2,…,l;
62、步骤三二四,选择一个vj=0的采样点xj,设置vj=1,将其ε域中的点添加到域集nj中;如果nj中的点数小于η,则标记点xj作为偏差评估,否则,令u=u+1,创建一个新的集群集su,将xj添加到其中,然后转至步骤三二五;重复此循环,直到x中没有vj=0,转至步骤三二六;
63、步骤三二五,在nj中选择一个vq=0的点xq,令vq=1,并找出其ε域的点集nq;如果nq中的点数大于或等于η,则将nq合并到nj中;如果xq不是任何集群集的成员,将xq添加到su中,否则,重复此循环,直到nj中没有vq=0,返回到步骤三二四;
64、步骤三二六,删除标记为偏差评估的样本点,并获得新的转录结果集x*。
65、作为本发明的进一步改进,所述步骤三三中基于混合模糊多属性评价的设计综合评价的具体步骤如下:
66、步骤三三一,将量化的指标值转化为十级量化评分形式;
67、步骤三三二,计算单指标评估矩阵rn×10:
68、
69、其中,eij是满足第i项指标的状态分数等于(100-(j-1)×10)的过滤评估样本总数;
70、步骤三三三,计算模糊得分向量fm,并根据之前计算的单指标评价矩阵rn×10和指标权重向量w计算得到对滚装作业特种无人装备当前设计进度下的设计方案预期质量的度量评价值fs;
71、fm=w1*n*rn*10
72、
73、本发明的有益效果,针对当前在滚装作业特种无人装备在线设计的方案形成演进过程中,设计评审里程碑节点难以合理设置,一定程度影响设计周期进度的问题,关注设计行为关联演进状态与设计质量间的间接映射关联,通过对装备计算机辅助在线设计过程的直接数据的采集处理、编码转录与追溯推理分析,实现对当前设计进度下的预期设计质量的感知预测,能够帮助及时发现设计问题,指导设计决策。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194175.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表